DataAnnotation
KITTI格式的3D目标框标注
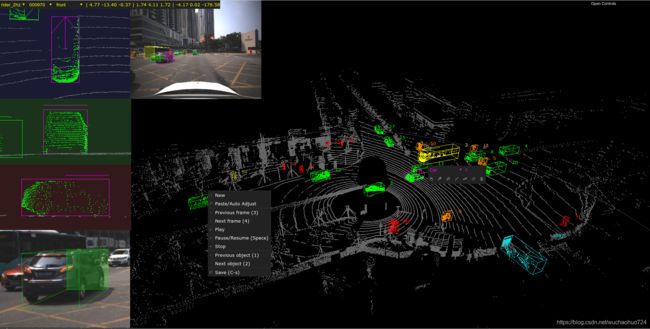
在得到图像数据,激光雷达数据,标定数据之后,需要进行3D目标框标注。本文采用的标注工具采用的是:SUSTechPOINTS。这个工具是2020年IEEE收录的,是一个比较好的开源项目,可以使得激光雷达和图像数据联合标注,感谢这个工作的贡献者。标注分为下列两个步骤:
- 安装SUSTechPOINTS
- 导入数据
- 标注结果
一、安装SUSTechPOINTS
根据官方安装方式即可。
二、导入数据
这个部分强调的是calibration这个文件。我们从autoware标定得到的结果是相机到激光雷达的变换矩阵,而SUST标注需要的是雷达到图像的变换矩阵。这个具体的变换原理,可以参考这篇博文。
而要从autoware标定的结果到SUST需要的标定参数,我们需要把autoware标定得到的外参矩阵,进行求逆。然后放入SUST中即可。例子:
import numpy as np
a = np.array([ [6.0286026043575580e-03, -9.0804300016155137e-03,
9.9994059910657929e-01, 6.1113303192026514e-02],
[-9.9974137931300844e-01, -2.1982070752877503e-02,
5.8277830037655742e-03, 3.9766420007541822e-03],
[2.1927846222605130e-02, -9.9971712716968164e-01,
-9.2106027835603399e-03, 5.3362131154951524e-02], [0., 0., 0., 1. ] ])
print(np.linalg.inv(a))
三、标注结果
从SUST标注后得到的结果是json文件,并以以下格式输出:
[{"psr":{"position":{"x":8.578882506346547,"y":4.570226735185341,"z":-0.620151247095764},"scale":{"x":3.870270893514173,"y":1.5810586719944622,"z":1.4560020655161139},"rotation":{"x":0,"y":0,"z":6.152285613280012}},"obj_type":"Car","obj_id":""}]
因此,我们需要转换为KITTI格式,下面为转换为KITTI的代码:
import json
import os
import math
import numpy as np
import random
import shutil
random.seed(0)
np.random.seed(0)
label_path = './data/20210409/label/'
calibFile = './data/20210409/calib/front.json'
sourceImagePath = './data/20210409/image/front/'
sourceVelodynePath = './data/20210409/bin/'
kittiLabelPath = '/home/.../catkin_ws/src/pcdetection/src/data/kitti/training/label_2/'
kittiCalibPath = '/home/.../catkin_ws/src/pcdetection/src/data/kitti/training/calib/'
imageSetsPath = '/home/.../catkin_ws/src/pcdetection/src/data/kitti/ImageSets/'
trainingPath = '/home/.../catkin_ws/src/pcdetection/src/data/kitti/training/'
testingPath = '/home/.../catkin_ws/src/pcdetection/src/data/kitti/testing/'
errorFlag = 0
def calibLabelFileGen(Path, fname, istrain=True):
if istrain:
if os.path.exists(Path + "label_2/" + fname.replace('json', 'txt')):
os.remove(Path + "label_2/" + fname.replace('json', 'txt'))
with open(label_path + fname)as fp:
# json content
jsonContent = json.load(fp)
if (len(jsonContent) == 0):
print("the json annotation file is empty, please check file: ", fname)
return 1
else:
for i in range(len(jsonContent)):
content = jsonContent[i]
psr = content["psr"]
position = psr["position"]
scale = psr["scale"]
rotation = psr["rotation"]
#lidar -> camera
pointXYZ = np.array([position["x"], position["y"], position["z"], 1]).T
camPosition = np.matmul(Tr_velo_to_cam, pointXYZ) #Tr_velo_to_cam @ pointXYZ camera coordinate position
#print(invExtrinsic @ pointXYZ)
# kitti content
kittiDict = {}
kittiDict["objectType"] = content["obj_type"]
kittiDict["truncated"] = "1.0"
kittiDict["occluded"] = "0"
kittiDict["alpha"] = "0.0"
kittiDict["bbox"] = [0.00, 0.00, 50.00, 50.00] # should be higher than 50
kittiDict["diamensions"] = [scale['z'], scale['y'], scale['x']] #height, width, length
kittiDict["location"] = [camPosition[0], camPosition[1] + float(scale["z"])/2 , camPosition[2] ] # camera coordinate
kittiDict["rotation_y"] = -math.pi/2 - rotation["z"]
# write txt files
with open(Path + "label_2/" + fname.replace('json', 'txt'), 'a+') as f:
for item in kittiDict.values():
if isinstance(item, list):
for temp in item:
f.writelines(str(temp) + " ")
else:
f.writelines(str(item)+ " ")
f.writelines("\n")
# write calibration files
with open(Path + "calib/" + fname.replace('json', 'txt'), 'w') as f:
P2 = np.array(intrinsic).reshape(3,3)
P2 = np.insert(P2, 3, values=np.array([0,0,0]), axis=1)
f.writelines("P0: ")
for num in P2.flatten():
f.writelines(str(num)+ " ")
f.writelines("\n")
f.writelines("P1: ")
for num in P2.flatten():
f.writelines(str(num)+ " ")
f.writelines("\n")
f.writelines("P2: ")
for num in P2.flatten():
f.writelines(str(num)+ " ")
f.writelines("\n")
f.writelines("P3: ")
for num in P2.flatten():
f.writelines(str(num)+ " ")
f.writelines("\n")
f.writelines("R0_rect: ")
for num in np.eye(3,3).flatten():
f.writelines(str(num)+ " ")
f.writelines("\n")
f.writelines("Tr_velo_to_cam: ")
for temp in Tr_velo_to_cam[:3].flatten():
f.writelines(str(temp) + " ")
f.writelines("\n")
f.writelines("Tr_imu_to_velo: ")
for temp in Tr_velo_to_cam[:3].flatten():
f.writelines(str(temp) + " ")
return 0
# SUST image coordinate, kitti camera coordinate
def getCalibMatrix():
with open(calibFile) as fp:
calib = json.load(fp)
return calib["extrinsic"], calib["intrinsic"]
extrinsic, intrinsic = getCalibMatrix()
Tr_velo_to_cam = np.array(extrinsic).reshape(4,4)
print("Tr_velo_to_cam Extrinsic: ", Tr_velo_to_cam)
# read all annotation json files
files = os.listdir(label_path)
total_num = len(files)
testing_num = 4
training_num = total_num - testing_num
print("total files num:", total_num)
print("training files num:", training_num)
print("testing files num:", testing_num)
fileLists = ["test.txt", "train.txt", "trainval.txt", "val.txt"]
for fileName in fileLists:
if fileName == "test.txt":
with open(imageSetsPath + fileName, 'w') as f:
for i in range(training_num,total_num):
errorFlag = calibLabelFileGen(testingPath ,files[i], istrain=False)
if errorFlag:
pass
else:
shutil.copy(sourceImagePath + files[i].replace("json", "png"), testingPath + 'image_2/' + files[i].replace("json", "png")) # copy Image
shutil.copy(sourceVelodynePath + files[i].replace("json", "bin"), testingPath + 'velodyne/' + files[i].replace("json", "bin")) # copy bin
f.writelines(files[i].strip(".json") + "\n")
elif fileName == "train.txt":
with open(imageSetsPath + fileName, 'w') as f:
for i in range(training_num):
errorFlag = calibLabelFileGen(trainingPath , files[i], istrain=True)
if errorFlag:
pass
else:
shutil.copy(sourceImagePath + files[i].replace("json", "png"), trainingPath + 'image_2/' + files[i].replace("json", "png")) # copy Image
shutil.copy(sourceVelodynePath + files[i].replace("json", "bin"), trainingPath + 'velodyne/' + files[i].replace("json", "bin")) # copy bin
f.writelines(files[i].strip(".json") + "\n")
else:
shutil.copy(imageSetsPath + 'train.txt', imageSetsPath + fileName)
因为本文只用了一个相机,而KITTI有多个,因此其他的参数,如P0,P1等都是直接写入P2的参数,仅仅是为了满足KITTI的数据格式。而R0_rect本文则写入单位矩阵,Tr_velo_to_cam是上面一部分求出来的autoware标定结果的逆矩阵。而对于这种SUST到KITTI的转换,我们需要进行进一步的验证,保证标注的结果和训练的标注是一致的。而因为我们没有进行2D图像标注框,所以对于kittiDict[“bbox”] = [0.00, 0.00, 50.00, 50.00]设置为这个参数。为什么是50呢,因为KITTI上说明了Easy, Moderate, 和 hard的bounding box像素范围。如果全部设为0,会在数据预处理的时候,所有的数据都会被认为无效。我们通过kitti_viewer 查看转换后的结果。通过安装second.pytorch,利用其生成的kitti_infos_train.pkl。我们可以验证标注结果,如下图所示。
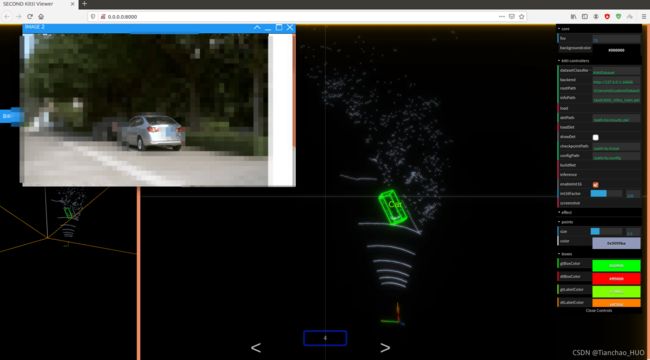 kitti训练的只是相机视野范围内的视锥体范围的点云,因此会出现以上右图的情况。
kitti训练的只是相机视野范围内的视锥体范围的点云,因此会出现以上右图的情况。
与其对应的标准文件显示如下:

上图的左图,代表的是SUST标注的结果,而右图代表的是转换后,kitti训练数据的结果。可以看出是一致的。
至此,标注完成。
Reference:
- https://github.com/naurril/SUSTechPOINTS