光线追踪渲染实战(三):OpenGL 光线追踪,用 GPU 加速计算!
项目代码仓库:
GitHub:https://github.com/AKGWSB/EzRT
gitee:https://gitee.com/AKGWSB/EzRT
目录
- 前言
- 0. 前置知识
- 1. 布置画布
- 2. 三角形数据传送到 shader
- 3. 在 shader 中进行三角形求交
- 4. 线性化 BVH 树
- 5. BVH 数据传送到 shader
- 6. 和 AABB 盒子求交
- 7. 非递归遍历 BVH 树
- 8. 开始光线追踪
-
- 8.1. 原理回顾
- 8.2. 帮助函数
- 8.3. pathTracing 的实现
- 8.4. 多帧混合与后处理
- 9. HDR 环境贴图
- 10. 完整代码
-
- 10.1. c++ 代码
- 10.2. 片元着色器(pass1,光线追踪)
- 10.3. 片元着色器(pass2,pass3,伽马矫正与色调映射)
- 10.4. 顶点着色器(共用)
- 总结 & 后记
前言
在 GPU 上实现光线追踪!


在差不多半年之前,我在 光线追踪渲染实战 中讨论并实现了简单的光线追踪,用 c++ 和多线程在 cpu 上最简单的计算,不过仅支持简单的三角形和球作为图元
时过境迁,摆弄这些精致的球体已不再新颖,为了高效遍历大量三角形,这篇 光线追踪加速遍历结构 学习并且讨论了 BVH 这种加速遍历数据结构,同时给出了 c++ 的简单实现和可视化的代码
如果说前两篇博客是 mc 中的木镐,石镐的话,今天我们就敲把铁镐,顺便把 GPU 放在火上烤一烤:
唔,大概说一下思路把:用的是 OpenGL 的 fragment shader 逐像素计算光追,然后三角形和 BVH 结构还有材质等信息,编码一下塞到纹理里面传给 shader,然后嗯算就完事了
hhh 核心部分很简单,就是把原来的 c++ 代码移植一下,搞到 GLSL 里面运行。emmm 这不是经典的大象塞进冰箱嘛。事实上为此我花费很多时间来解决各种百家争鸣的 bug
好在困难的时期已经过去了,翻过这座山… 好了。。。不扯闲话了,做好准备,我们要再一次进入波与粒的世界!
0. 前置知识
注:
该部分不涉及任何原理,代码讲解
涉猎该部分列出的前置知识,才能比较顺利的阅读本篇博客,以至于看到代码的时候不至于一头雾水 hhh
环境
visual studio 2019,数学库用 glm,然后 OpenGL 用 glew,窗口管理用 freeglut,图像读取用 SOIL2,关于怎么在 vs 上安装第三方库,可以使用 vcpkg 进行包管理,具体用法参考 我之前的博客
OpenGL
因为是基于 GLSL 的实现,那么首先对 OpenGL 得有一定的了解。常见的概念,比如绘制流程,着色器,坐标变换等。常见的操作,比如缓冲区对象,传送纹理,传递 uniform 一致变量等等。关于 OpenGL 的教程,最经典的莫过于 Learn OpenGL 了。当然也顺便推销下我自己的 专栏,尽管它费拉不堪…
GLSL
然后,片段着色器不是简单的输出重心插值后的顶点颜色。我们要在 fragment shader 中洋洋洒洒编写将近 114514e1919 行的代码来进行一个光的追,所以需要了解 GLSL 的语法规范,函数接口,uniform 变量,纹理,采样等操作
简单的几何学
和三角形求交,和轴对齐包围盒 AABB 长方体盒子求交,三角形重心插值等数学几何原理。和三角形求交的原理,和 AABB 求交…
路径追踪
一个点的颜色并不是由魔法确定的,而是通过渲染方程进行积分求解。每次积分逐像素递归求解光路直到碰到光源为止。原理和代码参考:光线追踪渲染实战
1. 布置画布
片段着色器会对每个像素进行一次计算,并且是在 GPU 上并行的,这正好满足我们的要求:并行与逐像素计算!我们用它来计算光线追踪的颜色!
利用片元着色器计算每个像素,首先我们绘制一个正方形铺满整个屏幕,作为我们的画布:
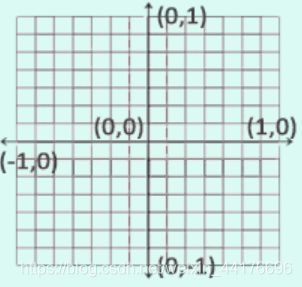
不需要任何的变换矩阵,直接将 6 个顶点固定到 NDC space,即 [-1, 1] 的范围,c++ 的代码很简单:
std::vector<vec3> square = {
vec3(-1, -1, 0), vec3(1, -1, 0), vec3(-1, 1, 0),
vec3(1, 1, 0), vec3(-1, 1, 0), vec3(1, -1, 0)
};
// 生成 vao vbo , 传送数据,绘制
...
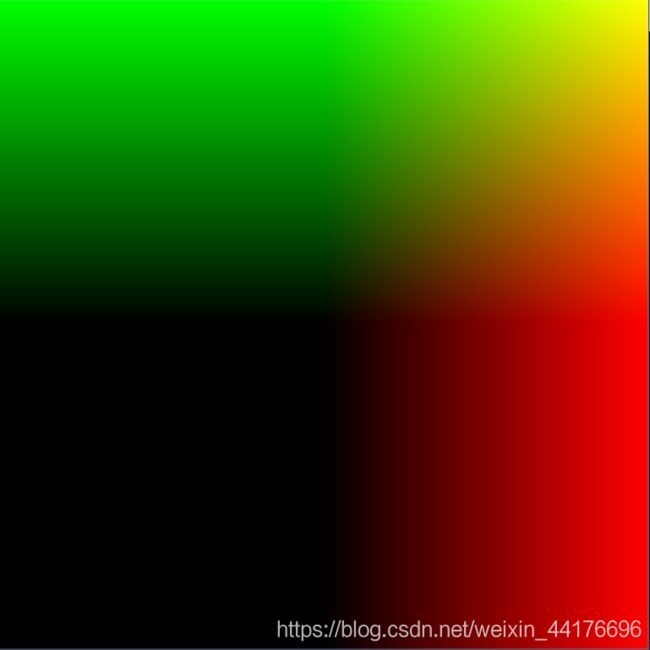
顶点着色器直接传递顶点的 NDC 坐标作为像素的片元坐标,pix 变量的范围 [-1, 1],在片段着色器中尝试输出像素的坐标 pix 作为颜色。当看到如下的图像,说明画布有在正常工作:
2. 三角形数据传送到 shader
注:
这部分的代码相当无聊,我们是在为 shader 准备数据
如果您比较关心路径追踪的 GLSL 实现,那么大可跳过该部分
和以往的光线追踪程序不同,计算发生在 GPU 端。向 shader 中传递数据有很多种方式,uniform 数组,uniform buffer 等等,但是这些方式都存在数目限制,无法传送大量的数据
回想我们是怎么将图片传送到 GPU 上的,没错,纹理!我们通过 c++ 将模型数据读取到内存,然后以纹理的形式将数据传送到显存,然后在 shader 中对纹理进行采样就可以读出原来的数据!
我们的数据通常是以 数组 形式进行传送,比如三角形数组,BVH 二叉树数组,材质数组等等。这些数组都是一维的,以方便我们用 下标 指针进行访问和采样
可是众所周知一般的图片纹理是二维的,通过一个 0 ~ 1 范围的 uv 坐标进行采样而不是下标。暂且不谈把一维数组折叠到二维纹理这种奇技淫巧,显卡电路中焊死的硬件双线性插值过滤器也会破坏数据的准确性
出于这些原因,OpenGL 提供了一种较为原始的传递方式,叫做 Buffer Texture,即使用纹理作为通用数据缓冲区。它允许我们直接将内存中的二进制数据搬运到显存中,然后通过一种特殊的采样器,也就是 samplerBuffer 来访问。
和一般的 sampler2D 不同,samplerBuffer 将纹理的内容(即显存中的原始数据)视为一维数组,可以通过 下标直接索引 数据,并且不会使用任何过滤器这刚好满足我们的需要!
关于 Buffer Texture 的用法,可以参照 OpenGL Wiki ,或者下面的简单例子。假设我们有一个数组要传送:
int n; // 数组大小
float triangles[];
我们首先需要创建一个缓冲区对象,叫做 texture buffer object,简称 tbo,这可以类比为显存中开辟了一块空间:
GLuint tbo;
glGenBuffers(1, &tbo);
glBindBuffer(GL_TEXTURE_BUFFER, tbo);
然后将数据塞进缓冲区中:
glBufferData(GL_TEXTURE_BUFFER, n * sizeof(float), &your_data[0], GL_STATIC_DRAW);
随后创建一块纹理,注意这时的纹理类型应该为 GL_TEXTURE_BUFFER 这表示我们开辟的不是图像纹理而是数据缓冲区纹理:
GLuint tex;
glGenTextures(1, &tex);
glBindTexture(GL_TEXTURE_BUFFER, tex);
然后用 glTexBuffer 将 tbo 中的数据关联到 texture buffer,这里我们使用 GL_RGB32F 的格式,这样一次访问可以取出一个 vec3 向量的数据。采样器的返回值有 RGB 三个通道,每个通道都是 32 位的浮点数:
glTexBuffer(GL_TEXTURE_BUFFER, GL_RGB32F, tbo);
最后传送 0 号纹理到着色器:
glActiveTexture(GL_TEXTURE0);
glUniform1i(glGetUniformLocation(program, "triangles"), 0);
然后在着色器端使用 texelFetch 和一个整数下标 index 进行 samplerBuffer 类型的纹理的查询:
uniform samplerBuffer triangles;
...
int index = xxx
vec3 data = texelFetch(triangles, index).xyz;
注意这里的数据格式 GL_RGB32F 指的是一个下标(一次采样)能读取到多少数据,即一格数据的单位。一个下标将会索引三个 32 位的浮点数,并且返回一个 vec4,但是仅有 rgb 分量有效。他们和内存数据的映射关系如下:

至此,我们已经掌握了在 GPU 上一次存取 12 字节(RGB32)内存数据的方法,但是我们的结构体不一定都是 12 字节对齐的
注:
也可以使用 GL_R32F 来每次读取一个 32 位浮点数,这样能够更加灵活的组织数据
但是显然一次读取一个 vec3 效率更高
以三角形和其材质为例,在 CPU 上 c++ 代码中他们的定义是这样的:
// 物体表面材质定义
struct Material {
vec3 emissive = vec3(0, 0, 0); // 作为光源时的发光颜色
vec3 baseColor = vec3(1, 1, 1);
float subsurface = 0.0;
float metallic = 0.0;
float specular = 0.0;
float specularTint = 0.0;
float roughness = 0.0;
float anisotropic = 0.0;
float sheen = 0.0;
float sheenTint = 0.0;
float clearcoat = 0.0;
float clearcoatGloss = 0.0;
float IOR = 1.0;
float transmission = 0.0;
};
// 三角形定义
struct Triangle {
vec3 p1, p2, p3; // 顶点坐标
vec3 n1, n2, n3; // 顶点法线
Material material; // 材质
};
注:
这里卖个关子…
算了,这里材质用的是 Disney 定义的 PBR 材质参数,下一章节中我们将实现 Disney principel’s BRDF,简单的说就是规范化的基于物理的渲染
编码三角形数据,我们创建结构体 Triangle_encoded,他们的数据类型都是 vec3 组成的,满足 12 字节对齐:
struct Triangle_encoded {
vec3 p1, p2, p3; // 顶点坐标
vec3 n1, n2, n3; // 顶点法线
vec3 emissive; // 自发光参数
vec3 baseColor; // 颜色
vec3 param1; // (subsurface, metallic, specular)
vec3 param2; // (specularTint, roughness, anisotropic)
vec3 param3; // (sheen, sheenTint, clearcoat)
vec3 param4; // (clearcoatGloss, IOR, transmission)
};
然后准备编码数据,这部分的 c++ 代码相当无聊,就是把数据倒腾来倒腾去:
// 读取三角形
std::vector triangles;
readObj()
int nTriangles = triangles.size();
...
// 编码 三角形, 材质
std::vector triangles_encoded(nTriangles);
for (int i = 0; i < nTriangles; i++) {
Triangle& t = triangles[i];
Material& m = t.material;
// 顶点位置
triangles_encoded[i].p1 = t.p1;
triangles_encoded[i].p2 = t.p2;
triangles_encoded[i].p3 = t.p3;
// 顶点法线
triangles_encoded[i].n1 = t.n1;
triangles_encoded[i].n2 = t.n2;
triangles_encoded[i].n3 = t.n3;
// 材质
triangles_encoded[i].emissive = m.emissive;
triangles_encoded[i].baseColor = m.baseColor;
triangles_encoded[i].param1 = vec3(m.subsurface, m.metallic, m.specular);
triangles_encoded[i].param2 = vec3(m.specularTint, m.roughness, m.anisotropic);
triangles_encoded[i].param3 = vec3(m.sheen, m.sheenTint, m.clearcoat);
triangles_encoded[i].param4 = vec3(m.clearcoatGloss, m.IOR, m.transmission);
}
然后利用 texture buffer 传送到 shader 中,这里创建 texture buffer object,然后将数据导入 tbo,然后创建纹理,将 tbo 和纹理绑定:
GLuint trianglesTextureBuffer;
GLuint tbo0;
glGenBuffers(1, &tbo0);
glBindBuffer(GL_TEXTURE_BUFFER, tbo0);
glBufferData(GL_TEXTURE_BUFFER, triangles_encoded.size() * sizeof(Triangle_encoded), &triangles_encoded[0], GL_STATIC_DRAW);
glGenTextures(1, &trianglesTextureBuffer);
glBindTexture(GL_TEXTURE_BUFFER, trianglesTextureBuffer);
glTexBuffer(GL_TEXTURE_BUFFER, GL_RGB32F, tbo0);
然后在 shader 中通过 texelFetch 解码数据,并且还原为原本的结构体,这部分的代码也相当无聊,同样是倒腾数据。只是注意访问纹理是以 vec3 为单位,编码后的三角形包含 12 个 vec3 向量,所以要通过下标计算每个下标对应的偏移,GLSL 代码如下:
#define SIZE_TRIANGLE 12
uniform samplerBuffer triangles;
...
// 获取第 i 下标的三角形
Triangle getTriangle(int i) {
int offset = i * SIZE_TRIANGLE;
Triangle t;
// 顶点坐标
t.p1 = texelFetch(triangles, offset + 0).xyz;
t.p2 = texelFetch(triangles, offset + 1).xyz;
t.p3 = texelFetch(triangles, offset + 2).xyz;
// 法线
t.n1 = texelFetch(triangles, offset + 3).xyz;
t.n2 = texelFetch(triangles, offset + 4).xyz;
t.n3 = texelFetch(triangles, offset + 5).xyz;
return t;
}
// 获取第 i 下标的三角形的材质
Material getMaterial(int i) {
Material m;
int offset = i * SIZE_TRIANGLE;
vec3 param1 = texelFetch(triangles, offset + 8).xyz;
vec3 param2 = texelFetch(triangles, offset + 9).xyz;
vec3 param3 = texelFetch(triangles, offset + 10).xyz;
vec3 param4 = texelFetch(triangles, offset + 11).xyz;
m.emissive = texelFetch(triangles, offset + 6).xyz;
m.baseColor = texelFetch(triangles, offset + 7).xyz;
m.subsurface = param1.x;
m.metallic = param1.y;
m.specular = param1.z;
m.specularTint = param2.x;
m.roughness = param2.y;
m.anisotropic = param2.z;
m.sheen = param3.x;
m.sheenTint = param3.y;
m.clearcoat = param3.z;
m.clearcoatGloss = param4.x;
m.IOR = param4.y;
m.transmission = param4.z;
return m;
}
然后尝试传输一个三角形和它的材质,在 shader 中输出它的颜色,顶点信息,或者任何属性以验证。如果成功读取颜色(或者其他数据,比如坐标)说明数据传输无误
3. 在 shader 中进行三角形求交
首先是光线的定义:
// 光线
struct Ray {
vec3 startPoint;
vec3 direction;
};
然后我们还需要一个求交结果,它包含一些必要的信息,比如交点位置,距离和表面材质:
// 光线求交结果
struct HitResult {
bool isHit; // 是否命中
bool isInside; // 是否从内部命中
float distance; // 与交点的距离
vec3 hitPoint; // 光线命中点
vec3 normal; // 命中点法线
vec3 viewDir; // 击中该点的光线的方向
Material material; // 命中点的表面材质
};
三角形求交的部分也不难,首先是求解光线和三角形所在平面的距离 t,有了距离顺势求出交点 P,思路如下:

求出交点之后,判断交点是否在三角形内。这里通过叉乘的方向和法相是否同向来判断。如果三次叉乘都和 N 同向,说明 P 在三角形中:
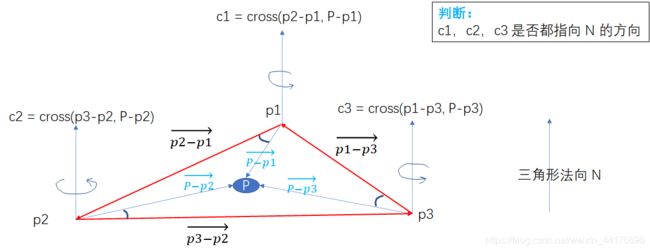
代码也很简单,唯一值得注意的是如果视线方向 d 和三角形的法向 N 的方向相同,要翻转一下 N 以保证不管从正面还是背面击中三角形,我们都能获得正确的法向量。代码如下:
#define INF 114514.0
// 光线和三角形求交
HitResult hitTriangle(Triangle triangle, Ray ray) {
HitResult res;
res.distance = INF;
res.isHit = false;
res.isInside = false;
vec3 p1 = triangle.p1;
vec3 p2 = triangle.p2;
vec3 p3 = triangle.p3;
vec3 S = ray.startPoint; // 射线起点
vec3 d = ray.direction; // 射线方向
vec3 N = normalize(cross(p2-p1, p3-p1)); // 法向量
// 从三角形背后(模型内部)击中
if (dot(N, d) > 0.0f) {
N = -N;
res.isInside = true;
}
// 如果视线和三角形平行
if (abs(dot(N, d)) < 0.00001f) return res;
// 距离
float t = (dot(N, p1) - dot(S, N)) / dot(d, N);
if (t < 0.0005f) return res; // 如果三角形在光线背面
// 交点计算
vec3 P = S + d * t;
// 判断交点是否在三角形中
vec3 c1 = cross(p2 - p1, P - p1);
vec3 c2 = cross(p3 - p2, P - p2);
vec3 c3 = cross(p1 - p3, P - p3);
bool r1 = (dot(c1, N) > 0 && dot(c2, N) > 0 && dot(c3, N) > 0);
bool r2 = (dot(c1, N) < 0 && dot(c2, N) < 0 && dot(c3, N) < 0);
// 命中,封装返回结果
if (r1 || r2) {
res.isHit = true;
res.hitPoint = P;
res.distance = t;
res.normal = N;
res.viewDir = d;
// 根据交点位置插值顶点法线
float alpha = (-(P.x-p2.x)*(p3.y-p2.y) + (P.y-p2.y)*(p3.x-p2.x)) / (-(p1.x-p2.x-0.00005)*(p3.y-p2.y+0.00005) + (p1.y-p2.y+0.00005)*(p3.x-p2.x+0.00005));
float beta = (-(P.x-p3.x)*(p1.y-p3.y) + (P.y-p3.y)*(p1.x-p3.x)) / (-(p2.x-p3.x-0.00005)*(p1.y-p3.y+0.00005) + (p2.y-p3.y+0.00005)*(p1.x-p3.x+0.00005));
float gama = 1.0 - alpha - beta;
vec3 Nsmooth = alpha * triangle.n1 + beta * triangle.n2 + gama * triangle.n3;
Nsmooth = normalize(Nsmooth);
res.normal = (res.isInside) ? (-Nsmooth) : (Nsmooth);
}
return res;
}
然后我们编写一个函数,暴力遍历三角形数组进行求交,返回最近的交点:
#define INF 114514.0
// 暴力遍历数组下标范围 [l, r] 求最近交点
HitResult hitArray(Ray ray, int l, int r) {
HitResult res;
res.isHit = false;
res.distance = INF;
for(int i=l; i<=r; i++) {
Triangle triangle = getTriangle(i);
HitResult r = hitTriangle(triangle, ray);
if(r.isHit && r.distance<res.distance) {
res = r;
res.material = getMaterial(i);
}
}
return res;
}
然后我们配置一下相机,相机位于 vec3(0, 0, 4),看向 z 轴负方向,根据画布像素的 NDC 坐标来投射射线。这里投影平面长宽均为 2.0,而 zNear 为 2.0,这保证了 50° 左右的视场角:
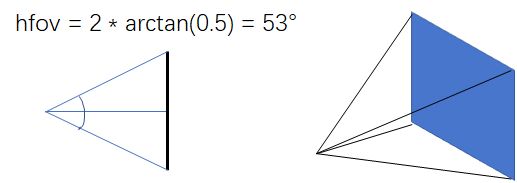
代码如下:
Ray ray;
ray.startPoint = vec3(0, 0, 4);
vec3 dir = vec3(pix.xy, 2) - ray.startPoint;
ray.direction = normalize(dir);
然后用刚刚写的 hitArray 遍历数组,求交点的同时返回表面的颜色:
uniform int nTriangles;
...
HitResult res = hitArray(ray, 0, nTriangles-1);
if(res.isHit) fragColor = vec4(res.material.color, 1);
三角形… 已经看的足够多次了…

读取一个 Stanford Bunny 的 obj 模型再试一下:
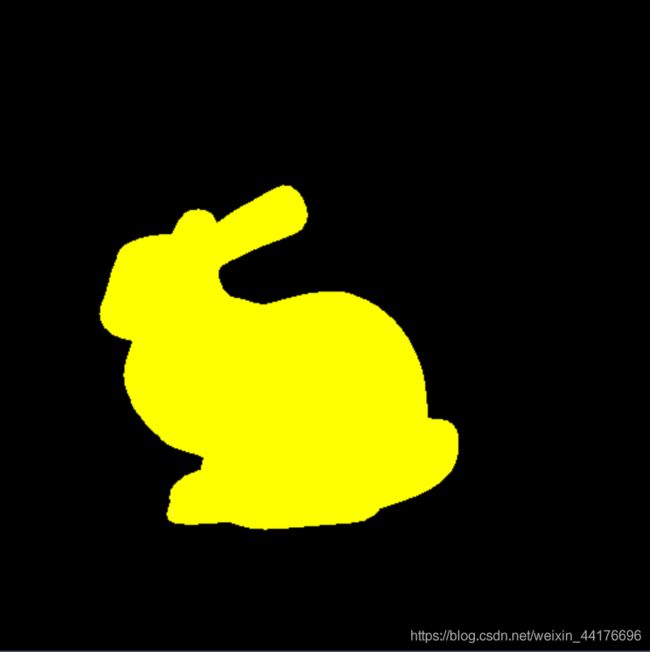
ohhhh 虽然是暴力遍历 4000 多个三角形,但是因为 GPU 强大的并行能力,我们能够维持 4 ~ 5 的 FPS
4. 线性化 BVH 树
我们成功遍历三角形,但是我们需要更加高效的遍历,BVH 树是一个不错的选择。但是在 GLSL 中 没有指针 这一概念,我们需要将使用 指针 的树形结构改为使用 数组下标 作为指针的线性化二叉树。相信学过数据结构的童鞋都对此不陌生…

这是原来的 BVH 节点结构体,内容分为三部分,分别是左右孩子,AABB 碰撞盒,叶子节点信息,其中 AA 为极小点,BB 为极大点。因为不能用指针,只能用数组下标,我们将结构体改为:
// BVH 树节点
struct BVHNode {
int left, right; // 左右子树索引
int n, index; // 叶子节点信息
vec3 AA, BB; // 碰撞盒
};
这里还引入了一个小变化:一个叶子节点可以保存多个三角形,n 表示该叶子节点的三角形数目,index 表示该节点第一个三角形,在 triangles 数组中的索引:

线性化二叉树也很简单,只需要每次创建节点的时候,将 new Node() 改为 push_back() 即插入数组,而下标的索引方式是照常的。
这里我们允许一个叶子包含 n 个三角形,每次创建节点直接 push_back,然后通过下标进行索引。使用最简单的二分法创建,每次将三角形数组对半分!创建 BVH 的代码如下:
注:
这里仅给出普通的二分建树代码
SAH 优化版本的代码在下文 “完整代码” 部分可以找到
// 构建 BVH
int buildBVH(std::vector<Triangle>& triangles, std::vector<BVHNode>& nodes, int l, int r, int n) {
if (l > r) return 0;
// 注:
// 此处不可通过指针,引用等方式操作,必须用 nodes[id] 来操作
// 因为 std::vector<> 扩容时会拷贝到更大的内存,那么地址就改变了
// 而指针,引用均指向原来的内存,所以会发生错误
nodes.push_back(BVHNode());
int id = nodes.size() - 1; // 注意: 先保存索引
nodes[id] 的属性初始化 ...
// 计算 AABB
for (int i = l; i <= r; i++) {
... // 遍历三角形 计算 AABB
}
// 不多于 n 个三角形 返回叶子节点
if ((r - l + 1) <= n) {
nodes[id].n = r - l + 1;
nodes[id].index = l;
return id;
}
// 否则递归建树
// 按 x,y,z 划分数组
std::sort(...)
// 递归
int mid = (l + r) / 2;
int left = buildBVH(triangles, nodes, l, mid, n);
int right = buildBVH(triangles, nodes, mid + 1, r, n);
nodes[id].left = left;
nodes[id].right = right;
return id;
}
至此我们拥有一个线性化的二叉树,接下来准备将它送入 GPU
5. BVH 数据传送到 shader
注:
该部分的代码也相当无聊,尽情跳过
和三角形数据类似,编码,然后传送:
struct BVHNode_encoded {
vec3 childs; // (left, right, 保留)
vec3 leafInfo; // (n, index, 保留)
vec3 AA, BB;
};
编码的过程太无聊了,不复制代码了。这里贴一下在 shader 中解码 BVHNode 的代码:
#define SIZE_BVHNODE 4
uniform samplerBuffer nodes;
// 获取第 i 下标的 BVHNode 对象
BVHNode getBVHNode(int i) {
BVHNode node;
// 左右子树
int offset = i * SIZE_BVHNODE;
ivec3 childs = ivec3(texelFetch(nodes, offset + 0).xyz);
ivec3 leafInfo = ivec3(texelFetch(nodes, offset + 1).xyz);
node.left = int(childs.x);
node.right = int(childs.y);
node.n = int(leafInfo.x);
node.index = int(leafInfo.y);
// 包围盒
node.AA = texelFetch(nodes, offset + 2).xyz;
node.BB = texelFetch(nodes, offset + 3).xyz;
return node;
}
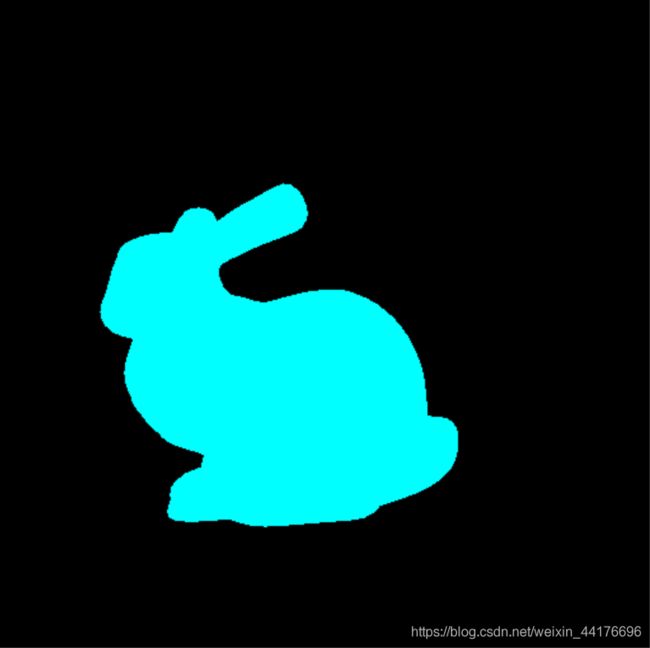
读取一个兔子,然后遍历所有节点,对于每个叶子节点,遍历它包含的所有三角形,看看兔子是否完整,以验证 BVH 是否传输正确:
注:
这一步还是暴力遍历,没有二分遍历 bvh,只是为了验证数据是否正确
投射光线
...
for(int i=0; i<nNodes; i++) {
BVHNode node = getBVHNode(i);
if(node.n>0) {
int L = node.index;
int R = node.index + node.n - 1;
HitResult res = hitArray(ray, L, R);
if(res.isHit) fragColor = vec4(res.material.color, 1);
}
}
如果返回和 hitArray 一样的结果,说明我们 BVH 数据传输的没问题:
此外,在遍历之前,建议输出一下 1 号节点的左指针,不出意外应该是 2,将 node.left / 3 作为像素颜色输出,如果出现灰色说明正确,务必确保 整数下标 的传输无误!
6. 和 AABB 盒子求交
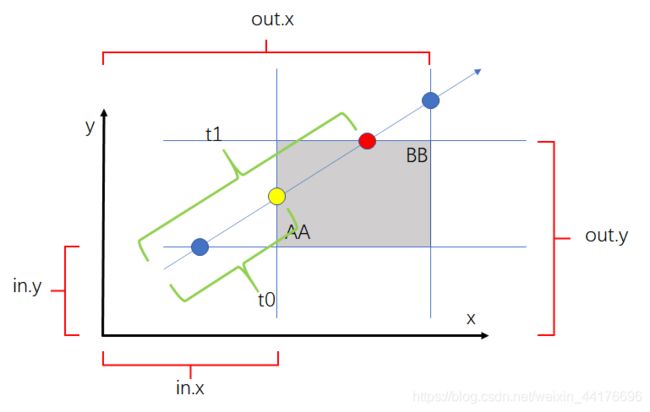
对于轴对齐包围盒,光线穿入穿出 xoy,xoz,yoz 平面,会有三组穿入点穿出点。如果找到一组穿入点穿出点,使得光线起点距离穿入点的距离 小于 光线起点距离穿出点的距离,即 t0 < t1 则说明命中
我们取 out 中最小的距离记作 t1,和 in 中最大的距离记作 t0,然后看是否 t1 > t0 如果满足等式,则说明命中:
对应的 GLSL 代码如下:
// 和 aabb 盒子求交,没有交点则返回 -1
float hitAABB(Ray r, vec3 AA, vec3 BB) {
vec3 invdir = 1.0 / r.direction;
vec3 f = (BB - r.startPoint) * invdir;
vec3 n = (AA - r.startPoint) * invdir;
vec3 tmax = max(f, n);
vec3 tmin = min(f, n);
float t1 = min(tmax.x, min(tmax.y, tmax.z));
float t0 = max(tmin.x, max(tmin.y, tmin.z));
return (t1 >= t0) ? ((t0 > 0.0) ? (t0) : (t1)) : (-1);
}
注:
n 即近交点 near,也就是 in
f 即远交点 far,也就是 out
因为 in 和 out 在 GLSL 中是关键字不能用作变量名
接下来测试一下。对于 BVH 的根节点(1 号节点)我们分别和其左右子树求交,如果左子树命中则返回红色,右子树命中则返回绿色,两个都命中则返回黄色:
...
BVHNode node = getBVHNode(1);
BVHNode left = getBVHNode(node.left);
BVHNode right = getBVHNode(node.right);
float r1 = hitAABB(ray, left.AA, left.BB);
float r2 = hitAABB(ray, right.AA, right.BB);
vec3 color;
if(r1>0) color = vec3(1, 0, 0);
if(r2>0) color = vec3(0, 1, 0);
if(r1>0 && r2>0) color = vec3(1, 1, 0);
...
结果如下:
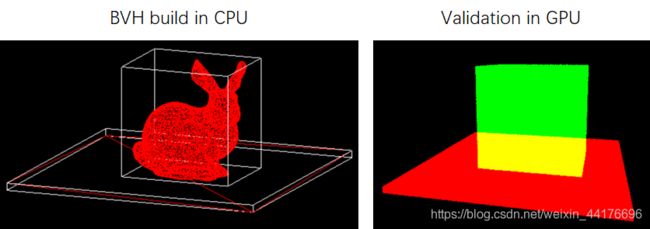
出现上述结果说明 BVH 的构建,传送和求交都没有问题
7. 非递归遍历 BVH 树
在 GPU 上面没有栈的概念,也不能执行递归程序,我们需要人为编写二叉树遍历的代码。对于 BVH 树,在和 根 节点求交 之后 ,我们总是查找它的左右子树,这相当于二叉树的 先序遍历 ,实现起来相对容易
维护一个栈来保存节点。首先将树根入栈,然后 while(!stack.empty()) 进行循环:
- 从栈中弹出节点 root
- 如果右树非空,将 root 的右子树压入栈中
- 如果左树非空,将 root 的左子树压入栈中
很简单,不过注意 先访问的节点后入栈 ,因为栈的存取顺序是相反的,这样保证下一次取栈顶元素,一定是先被访问的节点。这里摆烂了五毛特效糊一张非递归遍历时栈状态图:

如果不知道代码有没有 bug,可以上 leetcode 的第 144 题检验一下,这里是 传送门
至此我们掌握了非递归遍历二叉树的方法,在 GLSL 中没有 STL 的 stack,所以我们用数组和一个 sp 指针模拟栈。下面是遍历 BVH 查询 最近的 三角形的 GLSL 代码:
// 遍历 BVH 求交
HitResult hitBVH(Ray ray) {
HitResult res;
res.isHit = false;
res.distance = INF;
// 栈
int stack[256];
int sp = 0;
stack[sp++] = 1;
while(sp>0) {
int top = stack[--sp];
BVHNode node = getBVHNode(top);
// 是叶子节点,遍历三角形,求最近交点
if(node.n>0) {
int L = node.index;
int R = node.index + node.n - 1;
HitResult r = hitArray(ray, L, R);
if(r.isHit && r.distance<res.distance) res = r;
continue;
}
// 和左右盒子 AABB 求交
float d1 = INF; // 左盒子距离
float d2 = INF; // 右盒子距离
if(node.left>0) {
BVHNode leftNode = getBVHNode(node.left);
d1 = hitAABB(ray, leftNode.AA, leftNode.BB);
}
if(node.right>0) {
BVHNode rightNode = getBVHNode(node.right);
d2 = hitAABB(ray, rightNode.AA, rightNode.BB);
}
// 在最近的盒子中搜索
if(d1>0 && d2>0) {
if(d1<d2) { // d1
stack[sp++] = node.right;
stack[sp++] = node.left;
} else { // d2
stack[sp++] = node.left;
stack[sp++] = node.right;
}
} else if(d1>0) { // 仅命中左边
stack[sp++] = node.left;
} else if(d2>0) { // 仅命中右边
stack[sp++] = node.right;
}
}
return res;
}
这里通过交点的距离判断,优先查找近的盒子,能够大大加速。将原来的暴力查找的 hitArray 换成新的 hitBVH 函数,然后再一次看看效果:

帧数稳定在 100 左右,相比之前的暴力遍历的 5 帧,效率高了 20 倍不止
8. 开始光线追踪
8.1. 原理回顾
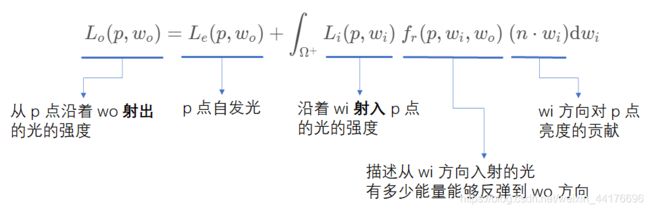
再一次回顾渲染方程:
因为光路可逆,沿着 wi 方向 射入 p 点的光的能量,等于从 q 点出发,沿着 wi 方向 射出 的光的能量:
L i ( p , w i ) = L o ( q , w i ) L_i(p, w_i)=L_o(q, w_i) Li(p,wi)=Lo(q,wi)
故形成递归式:
L o ( p , w o ) = L e ( p , w o ) + ∫ Ω + L o ( q , w i ) f r ( p , w i , w o ) ( n ⋅ w i ) d w i L_o(p, w_o)=L_e(p, w_o)+\int_{\Omega^+}L_o(q, w_i) \ f_r(p, w_i, w_o) \ (n\cdot w_i) {\rm d} w_i Lo(p,wo)=Le(p,wo)+∫Ω+Lo(q,wi) fr(p,wi,wo) (n⋅wi)dwi
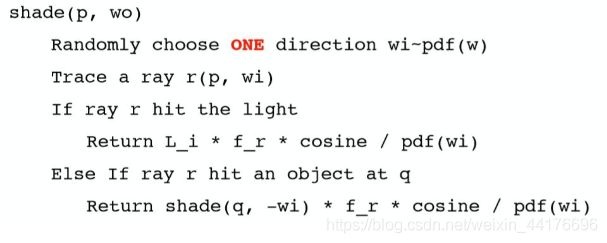
于是伪代码为:
注:
因为在 p 点法向半球随机一个 wi,此时 wi 的方向是射出,和定义的射入相反,故取负号
每次递归的返回结果都乘以了 f_r * cosine / pdf,但是对于 shader 中没有递归,我们用循环代替。维护一个变量 history 来记录每次递归,返回结果的累乘。
和上述的伪代码的参数入口不太一致,我们给定一个点 p 的表面信息,即 HitResult 结构体,一个入射光线方向 viewDir 和一个最大弹射次数,然后通过 pathTracing 函数求解 p 点的颜色:
投射光线
...
// primary hit
HitResult firstHit = hitBVH(ray);
vec3 color;
if(!firstHit.isHit) {
color = vec3(0);
} else {
vec3 Le = firstHit.material.emissive;
int maxBounce = 2;
vec3 Li = pathTracing(firstHit, maxBounce);
color = Le + Li;
}
fragColor = vec4(color, 1.0);
我们只是写完了 main 函数,pathTracing 还没开工。但是我们要做一些铺垫工作
8.2. 帮助函数
编写三个帮助函数,分别是:
- 0 ~ 1 均匀分布的随机数的函数
- 生成半球均匀分布的随机向量的函数
- 任意向量投影到 法向半球 的函数
首先是 0 ~ 1 均匀分布的随机数,该部分代码引自 Casual Shadertoy Path Tracing Part 1,并且需要一个 uniform uint 变量 frameCounter (帧计数器)做随机种子,同时还需要 width,height 和当前屏幕像素的 NDC 坐标 pix 变量:
uniform uint frameCounter;
uint seed = uint(
uint((pix.x * 0.5 + 0.5) * width) * uint(1973) +
uint((pix.y * 0.5 + 0.5) * height) * uint(9277) +
uint(frameCounter) * uint(26699)) | uint(1);
uint wang_hash(inout uint seed) {
seed = uint(seed ^ uint(61)) ^ uint(seed >> uint(16));
seed *= uint(9);
seed = seed ^ (seed >> 4);
seed *= uint(0x27d4eb2d);
seed = seed ^ (seed >> 15);
return seed;
}
float rand() {
return float(wang_hash(seed)) / 4294967296.0;
}
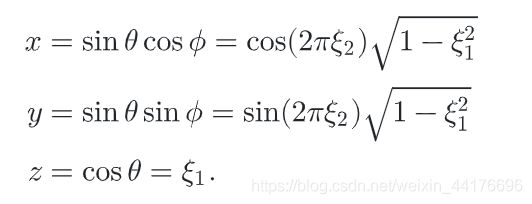
其次是半球均匀分布,这部分的代码引自 PBRT 13.6 ,其中 ξ 1 , ξ 2 \xi_1, \xi_2 ξ1,ξ2 是 0 ~ 1 均匀分布的随机数:
代码如下:
// 半球均匀采样
vec3 SampleHemisphere() {
float z = rand();
float r = max(0, sqrt(1.0 - z*z));
float phi = 2.0 * PI * rand();
return vec3(r * cos(phi), r * sin(phi), z);
}
此外,这里半球的 “上方向” 是 z 轴,需要做一次投影来对应到法向半球的法线 N 方向。该部分的代码引自 GPU Path Tracing in Unity – Part 2,GLSL 实现和文中有出入:
// 将向量 v 投影到 N 的法向半球
vec3 toNormalHemisphere(vec3 v, vec3 N) {
vec3 helper = vec3(1, 0, 0);
if(abs(N.x)>0.999) helper = vec3(0, 0, 1);
vec3 tangent = normalize(cross(N, helper));
vec3 bitangent = normalize(cross(N, tangent));
return v.x * tangent + v.y * bitangent + v.z * N;
}
8.3. pathTracing 的实现
紧接着是 pathTracing 的实现。这里我们仅实现漫反射
半球面积为 2 π 2\pi 2π ,这里我们取漫反射的概率密度函数 pdf 为 1 / 2 π 1/2\pi 1/2π,此外关于 f_r 这里我们取表面颜色除以 π \pi π, 先卖个关子,这里姑且看作一个常数
注:
这里 f_r 实际上是 BRDF,即双向反射分布函数
函数 BRDF(p, wi, wo) 的值,描述了光从 wi 射入 p 点,散射后有多少光能从 wo 射出
一个结论是漫反射的 BRDF 就是颜色值除以 pi
这里先记住,我后续的博客会有详细推导
具体的 pathTracing 代码如下:
// 路径追踪
vec3 pathTracing(HitResult hit, int maxBounce) {
vec3 Lo = vec3(0); // 最终的颜色
vec3 history = vec3(1); // 递归积累的颜色
for(int bounce=0; bounce<maxBounce; bounce++) {
// 随机出射方向 wi
vec3 wi = toNormalHemisphere(SampleHemisphere(), hit.normal);
// 漫反射: 随机发射光线
Ray randomRay;
randomRay.startPoint = hit.hitPoint;
randomRay.direction = wi;
HitResult newHit = hitBVH(randomRay);
float pdf = 1.0 / (2.0 * PI); // 半球均匀采样概率密度
float cosine_o = max(0, dot(-hit.viewDir, hit.normal)); // 入射光和法线夹角余弦
float cosine_i = max(0, dot(randomRay.direction, hit.normal)); // 出射光和法线夹角余弦
vec3 f_r = hit.material.baseColor / PI; // 漫反射 BRDF
// 未命中
if(!newHit.isHit) {
break;
}
// 命中光源积累颜色
vec3 Le = newHit.material.emissive;
Lo += history * Le * f_r * cosine_i / pdf;
// 递归(步进)
hit = newHit;
history *= f_r * cosine_i / pdf; // 累积颜色
}
return Lo;
}
运行代码:

结果非常嘈杂,这是因为我们要将每一帧的结果 累加 作为积分的值,而不是单独的取每一个离散的采样,为此需要混合多个帧的绘制结果
8.4. 多帧混合与后处理
为了获得前一帧的结果,我们需要维护一块纹理 lastFrame 来保存上一帧的图像,同时为了对输出进行后处理(比如伽马矫正,色调映射),我们需要实现一个简单管线:
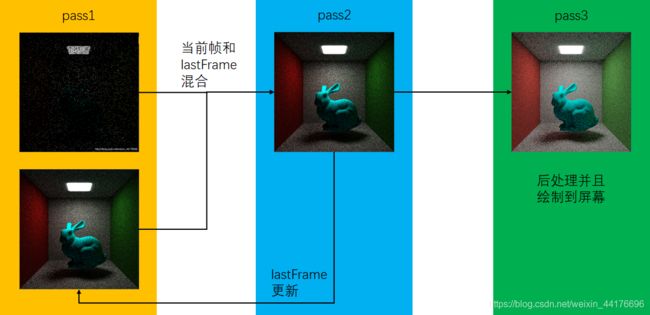
其中 pass1 进行光线追踪,和上一帧混合,输出。pass2 帧缓冲仅有一个颜色附件,关联到 lastFrame 上,直接输出颜色就可以更新 lastFrame 的值,而 pass3 则是后处理和最终输出。
关于管线和帧缓存,熟悉 defer render,或者 Minecraft shader 的童鞋应该不陌生,也可以参考我的博客:OpenGL学习(十一):延迟渲染管线,这里只是把第一个 geometry pass 改为了 raytracing pass
注:
再卖个关子,后面(的博客)我们还要和 geometry pass 打交道
这里封装一个 RenderPass 类,其中 colorAttachments 是要传入下一 pass 的纹理 id,这些纹理将作为帧缓冲的颜色附件。然后每个 pass 直接调用 draw 就行,其中 texPassArray 是 上一个 pass 的 colorAttachments,具体的 c++ 代码实现可以参考下文的【完整】代码部分:
class RenderPass {
public:
std::vector<GLuint> colorAttachments;
// 其他属性 ...
void bindData(bool finalPass = false) {
}
void draw(std::vector<GLuint> texPassArray = {}) {
}
};
在我们实现完管线之后,在 pass1 的片元着色器的代码中增加多帧混合:
uniform sampler2D lastFrame;
...
// 和上一帧混合
vec3 lastColor = texture2D(lastFrame, pix.xy*0.5+0.5).rgb;
color = mix(lastColor, color, 1.0/float(frameCounter+1));
再来一次,动图压缩了,噪点有点多:
好耶!至此我们在 GPU 上实现了光追,并且拟合的过程还是可视化的
9. HDR 环境贴图
锦上添花。
HDR 图是全景图,与一般的皂片不同,HDR 图片能够表示的亮度范围更加广。一般的图片和 HDR 图片在亮度改变时的对比如下:

注:
图片引自 How to Create Your Own HDR Environment Maps
这是一篇讲摄影的博客,某种意义上摄影也是一个(对现实世界进行)采样(或者积分)的过程。摄像机感光芯片的光门打开,电容开始积累光子(充电)然后读电容的值就可以获得像素颜色
(纯云,不保证对,我不会摄影,也没钱买相机 Orz
一般的图片亮度拉满也就 255,但是 HDR 亮度是整个浮点数范围,能够较好的表示现实中的光照,所以用来做环境贴图
首先可以在 ploy heaven 上面下载到 HDR 贴图:
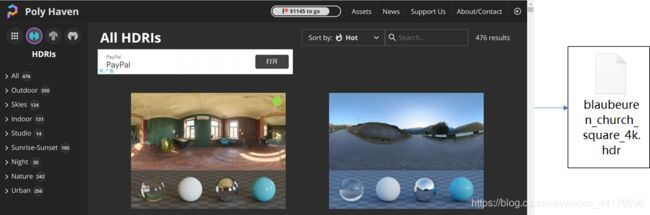
然后我们需要读取 HDR 图片,SOIL 显然是读不了的(其实有伪 HDR,是通过 RGBE 或者 RGBdivA,RGBdivA2 来实现的,不过似乎有一个 A 通道始终为 128 的 BUG 所以用不了。。。
这里我们选择一个轻量级的库:HDR Image Loader,它无需安装,只需要 include 一下就可用。它的代码在 这里
顺利 include 之后,读取 HDR 图的代码如下:
#include "lib/hdrloader.h"
...
// hdr 全景图
HDRLoaderResult hdrRes;
bool r = HDRLoader::load("./skybox/sunset.hdr", hdrRes);
GLuint hdrMap = 创建一张纹理()
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB32F, hdrRes.width, hdrRes.height, 0, GL_RGB, GL_FLOAT, hdrRes.cols);
然后在 shader 中,我们直接输出一下:

有两个问题:
- 图像有点暗,那是因为没有伽马矫正
- 图像是反的,待会采样的时候 flip 一下 y 就行了
- 图像很扭曲:待会我们用 spherical coord 采样就正常了
然后我们给定一个向量 v,将其转为采样 HDR图的 纹理坐标 uv,此部分的代码参考 stack overflow,这里和原文不同的是我翻转了 y 坐标:
// 将三维向量 v 转为 HDR map 的纹理坐标 uv
vec2 SampleSphericalMap(vec3 v) {
vec2 uv = vec2(atan(v.z, v.x), asin(v.y));
uv /= vec2(2.0 * PI, PI);
uv += 0.5;
uv.y = 1.0 - uv.y;
return uv;
}
至此我们可以采样 HDR 图了:
// 获取 HDR 环境颜色
vec3 sampleHdr(vec3 v) {
vec2 uv = SampleSphericalMap(normalize(v));
vec3 color = texture2D(hdrMap, uv).rgb;
//color = min(color, vec3(10));
return color;
}
注:
上述代码有一句 min 将 HDR 亮度 clamp 到了 10 以内,严格意义上这是不对的,我也注释掉了
但是如果不这么做,会出现很多 firefly,图片会很 noisy,如图:这是因为 HDR 存在亮度太高,面积又小的点,这使得很多次采样时,会偶发性地积累一次很大的能量
至于解决方案,可以利用重要性采样,统计图像的亮度分布,然后以这个分布去采样 hdr 图,下面是我写的一个以亮度为概率采样 envmap 的例子,后续的博客会详细讲解这部分的内容...(咕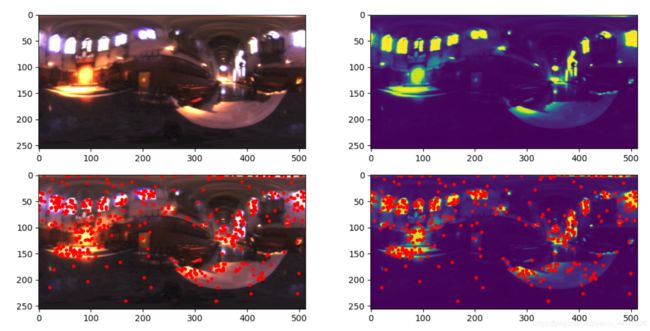
然后将 main 函数中,primary ray 的 miss 的处理中,color = vec3(0) 换为:
color = sampleHdr(ray.direction);
此外,pathTracing 中,ray miss 的时候也要处理:
// 未命中
if(!newHit.isHit) {
vec3 skyColor = sampleHdr(randomRay.direction);
Lo += history * skyColor * f_r * cosine_i / pdf;
break;
}
下图的 HDR 最大值被 clamp 到 10 以内,可以看到效果还是不错的:
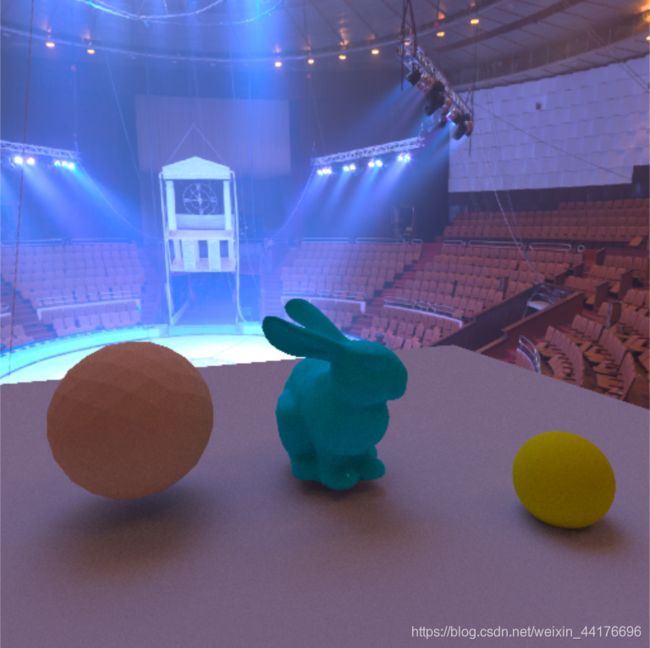
如果不 clamp,可以投下更为鲜明的阴影,但是缺点是有 firefly,后续可能会想办法用重要性采样解决(逃
10. 完整代码
10.1. c++ 代码
#include 10.2. 片元着色器(pass1,光线追踪)
#version 330 core
in vec3 pix;
out vec4 fragColor;
// ----------------------------------------------------------------------------- //
uniform uint frameCounter;
uniform int nTriangles;
uniform int nNodes;
uniform int width;
uniform int height;
uniform samplerBuffer triangles;
uniform samplerBuffer nodes;
uniform sampler2D lastFrame;
uniform sampler2D hdrMap;
uniform vec3 eye;
uniform mat4 cameraRotate;
// ----------------------------------------------------------------------------- //
#define PI 3.1415926
#define INF 114514.0
#define SIZE_TRIANGLE 12
#define SIZE_BVHNODE 4
// ----------------------------------------------------------------------------- //
// Triangle 数据格式
struct Triangle {
vec3 p1, p2, p3; // 顶点坐标
vec3 n1, n2, n3; // 顶点法线
};
// BVH 树节点
struct BVHNode {
int left; // 左子树
int right; // 右子树
int n; // 包含三角形数目
int index; // 三角形索引
vec3 AA, BB; // 碰撞盒
};
// 物体表面材质定义
struct Material {
vec3 emissive; // 作为光源时的发光颜色
vec3 baseColor;
float subsurface;
float metallic;
float specular;
float specularTint;
float roughness;
float anisotropic;
float sheen;
float sheenTint;
float clearcoat;
float clearcoatGloss;
float IOR;
float transmission;
};
// 光线
struct Ray {
vec3 startPoint;
vec3 direction;
};
// 光线求交结果
struct HitResult {
bool isHit; // 是否命中
bool isInside; // 是否从内部命中
float distance; // 与交点的距离
vec3 hitPoint; // 光线命中点
vec3 normal; // 命中点法线
vec3 viewDir; // 击中该点的光线的方向
Material material; // 命中点的表面材质
};
// ----------------------------------------------------------------------------- //
/*
* 生成随机向量,依赖于 frameCounter 帧计数器
* 代码来源:https://blog.demofox.org/2020/05/25/casual-shadertoy-path-tracing-1-basic-camera-diffuse-emissive/
*/
uint seed = uint(
uint((pix.x * 0.5 + 0.5) * width) * uint(1973) +
uint((pix.y * 0.5 + 0.5) * height) * uint(9277) +
uint(frameCounter) * uint(26699)) | uint(1);
uint wang_hash(inout uint seed) {
seed = uint(seed ^ uint(61)) ^ uint(seed >> uint(16));
seed *= uint(9);
seed = seed ^ (seed >> 4);
seed *= uint(0x27d4eb2d);
seed = seed ^ (seed >> 15);
return seed;
}
float rand() {
return float(wang_hash(seed)) / 4294967296.0;
}
// ----------------------------------------------------------------------------- //
// 半球均匀采样
vec3 SampleHemisphere() {
float z = rand();
float r = max(0, sqrt(1.0 - z*z));
float phi = 2.0 * PI * rand();
return vec3(r * cos(phi), r * sin(phi), z);
}
/*
vec3 toNormalHemisphere(vec3 v, vec3 N) {
vec3 tangent = vec3(0);
if(N.yz==vec2(0)) tangent = vec3(0, 0, -N.x);
else if(N.xz==vec2(0)) tangent = vec3(0, 0, N.y);
else if(N.xy==vec2(0)) tangent = vec3(-N.z, 0, 0);
else if(abs(N.x)>abs(N.y)) tangent = normalize(vec3(0, N.z, -N.y));
else tangent = normalize(vec3(-N.z, 0, N.x));
vec3 bitangent = cross(N, tangent);
return normalize(v.x * tangent + v.y * bitangent + v.z * N);
}
*/
// 将向量 v 投影到 N 的法向半球
vec3 toNormalHemisphere(vec3 v, vec3 N) {
vec3 helper = vec3(1, 0, 0);
if(abs(N.x)>0.999) helper = vec3(0, 0, 1);
vec3 tangent = normalize(cross(N, helper));
vec3 bitangent = normalize(cross(N, tangent));
return v.x * tangent + v.y * bitangent + v.z * N;
}
// ----------------------------------------------------------------------------- //
// 将三维向量 v 转为 HDR map 的纹理坐标 uv
vec2 SampleSphericalMap(vec3 v) {
vec2 uv = vec2(atan(v.z, v.x), asin(v.y));
uv /= vec2(2.0 * PI, PI);
uv += 0.5;
uv.y = 1.0 - uv.y;
return uv;
}
// 获取 HDR 环境颜色
vec3 sampleHdr(vec3 v) {
vec2 uv = SampleSphericalMap(normalize(v));
vec3 color = texture2D(hdrMap, uv).rgb;
color = min(color, vec3(10));
return color;
}
// ----------------------------------------------------------------------------- //
// 获取第 i 下标的三角形
Triangle getTriangle(int i) {
int offset = i * SIZE_TRIANGLE;
Triangle t;
// 顶点坐标
t.p1 = texelFetch(triangles, offset + 0).xyz;
t.p2 = texelFetch(triangles, offset + 1).xyz;
t.p3 = texelFetch(triangles, offset + 2).xyz;
// 法线
t.n1 = texelFetch(triangles, offset + 3).xyz;
t.n2 = texelFetch(triangles, offset + 4).xyz;
t.n3 = texelFetch(triangles, offset + 5).xyz;
return t;
}
// 获取第 i 下标的三角形的材质
Material getMaterial(int i) {
Material m;
int offset = i * SIZE_TRIANGLE;
vec3 param1 = texelFetch(triangles, offset + 8).xyz;
vec3 param2 = texelFetch(triangles, offset + 9).xyz;
vec3 param3 = texelFetch(triangles, offset + 10).xyz;
vec3 param4 = texelFetch(triangles, offset + 11).xyz;
m.emissive = texelFetch(triangles, offset + 6).xyz;
m.baseColor = texelFetch(triangles, offset + 7).xyz;
m.subsurface = param1.x;
m.metallic = param1.y;
m.specular = param1.z;
m.specularTint = param2.x;
m.roughness = param2.y;
m.anisotropic = param2.z;
m.sheen = param3.x;
m.sheenTint = param3.y;
m.clearcoat = param3.z;
m.clearcoatGloss = param4.x;
m.IOR = param4.y;
m.transmission = param4.z;
return m;
}
// 获取第 i 下标的 BVHNode 对象
BVHNode getBVHNode(int i) {
BVHNode node;
// 左右子树
int offset = i * SIZE_BVHNODE;
ivec3 childs = ivec3(texelFetch(nodes, offset + 0).xyz);
ivec3 leafInfo = ivec3(texelFetch(nodes, offset + 1).xyz);
node.left = int(childs.x);
node.right = int(childs.y);
node.n = int(leafInfo.x);
node.index = int(leafInfo.y);
// 包围盒
node.AA = texelFetch(nodes, offset + 2).xyz;
node.BB = texelFetch(nodes, offset + 3).xyz;
return node;
}
// ----------------------------------------------------------------------------- //
// 光线和三角形求交
HitResult hitTriangle(Triangle triangle, Ray ray) {
HitResult res;
res.distance = INF;
res.isHit = false;
res.isInside = false;
vec3 p1 = triangle.p1;
vec3 p2 = triangle.p2;
vec3 p3 = triangle.p3;
vec3 S = ray.startPoint; // 射线起点
vec3 d = ray.direction; // 射线方向
vec3 N = normalize(cross(p2-p1, p3-p1)); // 法向量
// 从三角形背后(模型内部)击中
if (dot(N, d) > 0.0f) {
N = -N;
res.isInside = true;
}
// 如果视线和三角形平行
if (abs(dot(N, d)) < 0.00001f) return res;
// 距离
float t = (dot(N, p1) - dot(S, N)) / dot(d, N);
if (t < 0.0005f) return res; // 如果三角形在光线背面
// 交点计算
vec3 P = S + d * t;
// 判断交点是否在三角形中
vec3 c1 = cross(p2 - p1, P - p1);
vec3 c2 = cross(p3 - p2, P - p2);
vec3 c3 = cross(p1 - p3, P - p3);
bool r1 = (dot(c1, N) > 0 && dot(c2, N) > 0 && dot(c3, N) > 0);
bool r2 = (dot(c1, N) < 0 && dot(c2, N) < 0 && dot(c3, N) < 0);
// 命中,封装返回结果
if (r1 || r2) {
res.isHit = true;
res.hitPoint = P;
res.distance = t;
res.normal = N;
res.viewDir = d;
// 根据交点位置插值顶点法线
float alpha = (-(P.x-p2.x)*(p3.y-p2.y) + (P.y-p2.y)*(p3.x-p2.x)) / (-(p1.x-p2.x-0.00005)*(p3.y-p2.y+0.00005) + (p1.y-p2.y+0.00005)*(p3.x-p2.x+0.00005));
float beta = (-(P.x-p3.x)*(p1.y-p3.y) + (P.y-p3.y)*(p1.x-p3.x)) / (-(p2.x-p3.x-0.00005)*(p1.y-p3.y+0.00005) + (p2.y-p3.y+0.00005)*(p1.x-p3.x+0.00005));
float gama = 1.0 - alpha - beta;
vec3 Nsmooth = alpha * triangle.n1 + beta * triangle.n2 + gama * triangle.n3;
Nsmooth = normalize(Nsmooth);
res.normal = (res.isInside) ? (-Nsmooth) : (Nsmooth);
}
return res;
}
// 和 aabb 盒子求交,没有交点则返回 -1
float hitAABB(Ray r, vec3 AA, vec3 BB) {
vec3 invdir = 1.0 / r.direction;
vec3 f = (BB - r.startPoint) * invdir;
vec3 n = (AA - r.startPoint) * invdir;
vec3 tmax = max(f, n);
vec3 tmin = min(f, n);
float t1 = min(tmax.x, min(tmax.y, tmax.z));
float t0 = max(tmin.x, max(tmin.y, tmin.z));
return (t1 >= t0) ? ((t0 > 0.0) ? (t0) : (t1)) : (-1);
}
// ----------------------------------------------------------------------------- //
// 暴力遍历数组下标范围 [l, r] 求最近交点
HitResult hitArray(Ray ray, int l, int r) {
HitResult res;
res.isHit = false;
res.distance = INF;
for(int i=l; i<=r; i++) {
Triangle triangle = getTriangle(i);
HitResult r = hitTriangle(triangle, ray);
if(r.isHit && r.distance<res.distance) {
res = r;
res.material = getMaterial(i);
}
}
return res;
}
// 遍历 BVH 求交
HitResult hitBVH(Ray ray) {
HitResult res;
res.isHit = false;
res.distance = INF;
// 栈
int stack[256];
int sp = 0;
stack[sp++] = 1;
while(sp>0) {
int top = stack[--sp];
BVHNode node = getBVHNode(top);
// 是叶子节点,遍历三角形,求最近交点
if(node.n>0) {
int L = node.index;
int R = node.index + node.n - 1;
HitResult r = hitArray(ray, L, R);
if(r.isHit && r.distance<res.distance) res = r;
continue;
}
// 和左右盒子 AABB 求交
float d1 = INF; // 左盒子距离
float d2 = INF; // 右盒子距离
if(node.left>0) {
BVHNode leftNode = getBVHNode(node.left);
d1 = hitAABB(ray, leftNode.AA, leftNode.BB);
}
if(node.right>0) {
BVHNode rightNode = getBVHNode(node.right);
d2 = hitAABB(ray, rightNode.AA, rightNode.BB);
}
// 在最近的盒子中搜索
if(d1>0 && d2>0) {
if(d1<d2) { // d1
stack[sp++] = node.right;
stack[sp++] = node.left;
} else { // d2
stack[sp++] = node.left;
stack[sp++] = node.right;
}
} else if(d1>0) { // 仅命中左边
stack[sp++] = node.left;
} else if(d2>0) { // 仅命中右边
stack[sp++] = node.right;
}
}
return res;
}
// ----------------------------------------------------------------------------- //
// 路径追踪
vec3 pathTracing(HitResult hit, int maxBounce) {
vec3 Lo = vec3(0); // 最终的颜色
vec3 history = vec3(1); // 递归积累的颜色
for(int bounce=0; bounce<maxBounce; bounce++) {
// 随机出射方向 wi
vec3 wi = toNormalHemisphere(SampleHemisphere(), hit.normal);
// 漫反射: 随机发射光线
Ray randomRay;
randomRay.startPoint = hit.hitPoint;
randomRay.direction = wi;
HitResult newHit = hitBVH(randomRay);
float pdf = 1.0 / (2.0 * PI); // 半球均匀采样概率密度
float cosine_o = max(0, dot(-hit.viewDir, hit.normal)); // 入射光和法线夹角余弦
float cosine_i = max(0, dot(randomRay.direction, hit.normal)); // 出射光和法线夹角余弦
vec3 f_r = hit.material.baseColor / PI; // 漫反射 BRDF
// 未命中
if(!newHit.isHit) {
vec3 skyColor = sampleHdr(randomRay.direction);
Lo += history * skyColor * f_r * cosine_i / pdf;
break;
}
// 命中光源积累颜色
vec3 Le = newHit.material.emissive;
Lo += history * Le * f_r * cosine_i / pdf;
// 递归(步进)
hit = newHit;
history *= f_r * cosine_i / pdf; // 累积颜色
}
return Lo;
}
// ----------------------------------------------------------------------------- //
void main() {
// 投射光线
Ray ray;
ray.startPoint = eye;
vec2 AA = vec2((rand()-0.5)/float(width), (rand()-0.5)/float(height));
vec4 dir = cameraRotate * vec4(pix.xy+AA, -1.5, 0.0);
ray.direction = normalize(dir.xyz);
// primary hit
HitResult firstHit = hitBVH(ray);
vec3 color;
if(!firstHit.isHit) {
color = vec3(0);
color = sampleHdr(ray.direction);
} else {
vec3 Le = firstHit.material.emissive;
vec3 Li = pathTracing(firstHit, 2);
color = Le + Li;
}
// 和上一帧混合
vec3 lastColor = texture2D(lastFrame, pix.xy*0.5+0.5).rgb;
color = mix(lastColor, color, 1.0/float(frameCounter+1));
// 输出
gl_FragData[0] = vec4(color, 1.0);
}
10.3. 片元着色器(pass2,pass3,伽马矫正与色调映射)
pass2:
#version 330 core
in vec3 pix;
out vec4 fragColor;
uniform sampler2D texPass0;
uniform sampler2D texPass1;
uniform sampler2D texPass2;
uniform sampler2D texPass3;
uniform sampler2D texPass4;
uniform sampler2D texPass5;
uniform sampler2D texPass6;
void main() {
gl_FragData[0] = vec4(texture2D(texPass0, pix.xy*0.5+0.5).rgb, 1.0);
}
pass3:
#version 330 core
in vec3 pix;
out vec4 fragColor;
uniform sampler2D texPass0;
uniform sampler2D texPass1;
uniform sampler2D texPass2;
uniform sampler2D texPass3;
uniform sampler2D texPass4;
uniform sampler2D texPass5;
uniform sampler2D texPass6;
vec3 toneMapping(in vec3 c, float limit) {
float luminance = 0.3*c.x + 0.6*c.y + 0.1*c.z;
return c * 1.0 / (1.0 + luminance / limit);
}
void main() {
vec3 color = texture2D(texPass0, pix.xy*0.5+0.5).rgb;
color = toneMapping(color, 1.5);
color = pow(color, vec3(1.0 / 2.2));
fragColor = vec4(color, 1.0);
}
10.4. 顶点着色器(共用)
#version 330 core
layout (location = 0) in vec3 vPosition; // cpu传入的顶点坐标
out vec3 pix;
void main() {
gl_Position = vec4(vPosition, 1.0);
pix = vPosition;
}
总结 & 后记
逐像素并行计算的特性使得 GPU 对于光追非常友好,我们今天实现了 GPU 上的简单光线追踪:

这里仅使用两次反弹,512 x 512 分辨率也足以榨干我这破电脑的 GPU 资源。不过对于比较简单的场景,部分未命中的 primary ray,或者比较均匀的 BVH,基本能有 30 ~ 40 帧。上图就是 40 帧多一点
总之… 我费了很大的努力,才为每一个像素涂上它正确的颜色。刚开始以为是简单的移植代码,后面发现坑太多了,从纹理格式,数据传送到渲染方程,几乎踩了所有的坑
GPU 上的 debug 比 CPU 要更加不直观,我曾不止一次对着屏幕上支离破碎的图像破口大骂,也因为纹理和不同 pass 之间的数据传递而挠头到深夜。不过当我最后成功点亮经典的 cornell,看着场景逐渐亮起的时候,这些困难已然成为过去式
撇开小小的成就感不谈,诚然我们的算法存在许多问题,比如仅支持漫反射,噪点多,拟合慢。对于这些问题,我后续的博客都会解决,不过篇幅有限,这里不方便展开了
算了。。。这里还是剧透一下吧:
- 更多反射:Disney BRDF & BSDF
- 拟合慢 & 噪点多:importance sampling
有时间就更新。。。没有就寄