将pytorch框架网络转换为onnx格式,并使用netron可视化HRNet的网络结构
文章目录
目录
前言
一、环境配置
1.配置运行环境
2.安装netron
二、pytorch到onnx
1.定位主干网络
2.onnx格式转换
附:HRNet emantic-segmentation运行的调试
前言
torch.onnx的官方文档及绝大多数博客只给出了转换简单网络的过程,这里我们以转换HRNet网络为例,给出转换过程及主干网络的可视化结果;netron对于原生pytorch网络支持不够好,转换为onnx格式后可以用netron方便的可视化复杂网络结构。
文章主要聚焦于用netron将pytorch框架的复杂网络结构可视化,未对onnx格式做详细测试。
一、环境配置
Ubuntu 20.04
pytorch 1.10
1.配置运行环境
HRNet代码来自于@Bubbliiiing 在github发布的图像分割模型github地址 https://github.com/bubbliiiing/hrnet-pytorch
https://github.com/bubbliiiing/hrnet-pytorch
克隆代码(略)
安装相关依赖
pip install -r requirements.txt对于requirements.txt中的包,安装最新版本即可。
安装onnx
pip install onnx2.安装netron
github地址https://github.com/lutzroeder/netron
任意安装方式均可,这里下载其appimage文件,下载后执行
chmod a+x Netron-5.7.0.AppImage
./netron-5.7.0.AppImage
即可运行
二、pytorch到onnx
1.定位主干网络
使用torch.onnx函数进行格式转换时需要在程序中定位到主干网络,大多数博客引用网络较为简单,而对于本地的复杂网络如HRNet,由多个子网络子程序组成。该HRNet分割网络主干相对路径是nets.hrnet.HRnet:
class HRnet(nn.Module):
def __init__(self, num_classes = 21, backbone = 'hrnetv2_w18', pretrained = False):
super(HRnet, self).__init__()
self.backbone = HRnet_Backbone(backbone = backbone, pretrained = pretrained)
last_inp_channels = np.int(np.sum(self.backbone.model.pre_stage_channels))
self.last_layer = nn.Sequential(
nn.Conv2d(in_channels=last_inp_channels, out_channels=last_inp_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(last_inp_channels, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=last_inp_channels, out_channels=num_classes, kernel_size=1, stride=1, padding=0)
)
def forward(self, inputs):
H, W = inputs.size(2), inputs.size(3)
x = self.backbone(inputs)
# Upsampling
x0_h, x0_w = x[0].size(2), x[0].size(3)
x1 = F.interpolate(x[1], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x2 = F.interpolate(x[2], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x3 = F.interpolate(x[3], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x = torch.cat([x[0], x1, x2, x3], 1)
x = self.last_layer(x)
x = F.interpolate(x, size=(H, W), mode='bilinear', align_corners=True)
return x2.onnx格式转换
在程序主目录新建.py文件并运行,程序如下:
from nets.hrnet import HRnet
import torch.onnx
batch_size = 1 #可以取其他值
torch_model = HRnet()
# torch_model.load_state_dict(torch.load('model_data/hrnetv2_w32_weights_voc.pth'), strict=False)
torch_model.eval()
x = torch.randn(batch_size, 3, 480, 480, requires_grad=True) #模拟输入数据尺寸
torch_out = torch_model(x)
torch.onnx.export(torch_model, # model being run
x, # model input (or a tuple for multiple inputs)
"test.onnx", # where to save the model (can be a file or file-like object)
export_params=True, # store the trained parameter weights inside the model file
opset_version = 11,
do_constant_folding=True, # whether to execute constant folding for optimization
input_names = ['input'], # the model's input names
output_names = ['output'], # the model's output names
dynamic_axes={'input' : {0 : 'batch_size'}, # variable length axes
'output' : {0 : 'batch_size'}})其中
# torch_model.load_state_dict(torch.load('model_data/hrnetv2_w32_weights_voc.pth'), strict=False)解除注释后程序运行可能报错,猜测是参数与网络结构不完全匹配导致,有解决方法的大佬请指点一下,感谢。
执行上述程序后可以发现在程序主目录出现了我们需要的onnx格式文件:

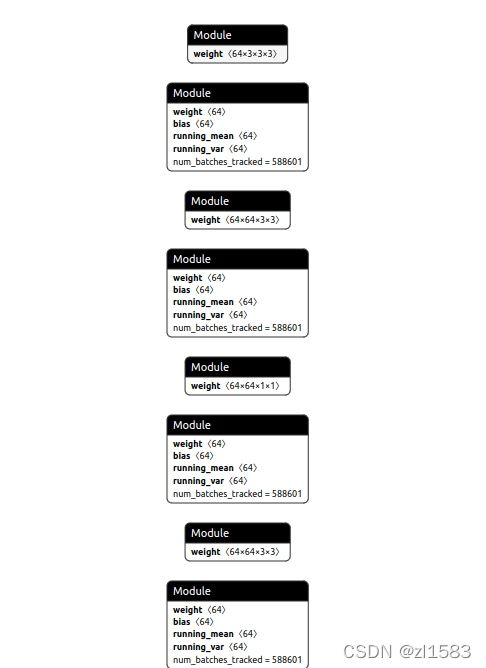
打开netron并导入test.onnx,可以看到HRNet的网络结构已经显示出来啦,可以帮助我们方便的学习代码及文章,如下图所示(网络结构复杂,只截取部分):

作为对比,下图展示netron直接读取HRNet的训练权重文件出现的效果:
可以看到其对pytorch的支持不算完善。
附:HRNet emantic-segmentation运行的调试
1.报错:
No module named ‘torchvision.models.utils’,无法加载load_state_dict_from_url...
由于torchvision的版本更新,对应的函数转移到了新版本的torch里面
将backbone.py中
from torchvision.models.utils import load_state_dict_from_url
改为
from torch.hub import load_state_dict_from_url
2.使用预测程序对视频进行分割测试时报错:
If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config, then re-run cmake or config...
解决办法:
解决办法https://blog.csdn.net/tudou2013goodluck/article/details/108402055以上两个问题解决后就可以进行分割预测了
3.文章的转换方法仍然存在瑕疵,转换格式时加上.pth文件就会报错,希望知道原因的大佬可以指出解决方法,谢谢。