基于Matlab交流异步电机矢量控制系统仿真建模
1 交流异步电机的数学模型
三相交流异步电机是一个高阶、非线性、强耦合的多变量系统[1]。为了便于分析,假定:
(1) 三相绕组对称,忽略空间谐波,磁势沿气隙圆周按正弦分布;
(2) 忽略磁饱和,各绕组的自感和互感都是线性的;
(3) 忽略铁损,不计涡流和磁滞损耗;
(4) 不考虑频率和温度变化对绕组的影响[2]。
则三相定子的电压方程可表示为:
式中:![]() 为定子三相电压;
为定子三相电压;![]() 为定子三相电流;
为定子三相电流;![]() 为定子三相绕组磁链;
为定子三相绕组磁链; 为定子各相绕组电阻;
为定子各相绕组电阻; 为微分算子
为微分算子![]() ;
;
三相转子的电压方程为:

式中:![]() 为转子三相电压;
为转子三相电压;![]() 为转子三相电流;
为转子三相电流;![]() 为转子三相绕组磁链;
为转子三相绕组磁链;![]() 为转子各相绕组电阻;为微分算子
为转子各相绕组电阻;为微分算子![]() ;
;
磁链方程为:

其中:  为绕组间互感(i,j=A,B,C,a,b,c)。
为绕组间互感(i,j=A,B,C,a,b,c)。
电磁转矩方程为:
![]()
式中: 为电机极对数;
为电机极对数; 为角位移。
为角位移。
运动方程为:
![]()
式中: 为电磁转矩;
为电磁转矩;![]() 为负载转矩;
为负载转矩; 为电机机械角速度;
为电机机械角速度; 为转动惯量。
为转动惯量。
2 基于 MATLAB 的交流异步电机系统模型的建立
在 Matlab6.5 的 Simulink 环境下,利用 Simscape Library丰富的模块库,在分析交流异步电机数学模型的基础上,建立了交流异步电机控制系统的仿真模型,整体设计框图如图 1 所示。系统采用双闭环控制方案:转速环由 PI 调节器构成,电流环由带电流内环控制的电源型PWM变频器构成。根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,其中主要包括:、矢量控制模块、帕克逆换模块、坐标变换模块、电流滞环控制模块、速度控制模块、转矩计算模块和电压逆变模块。通过这些功能模块的有 机整合,就可在MATLAB 中搭建出交流异步电机控制系统的仿真模型,并实现双闭环的控制算法,图 1 中各功能模块的作用与结构简述如下。
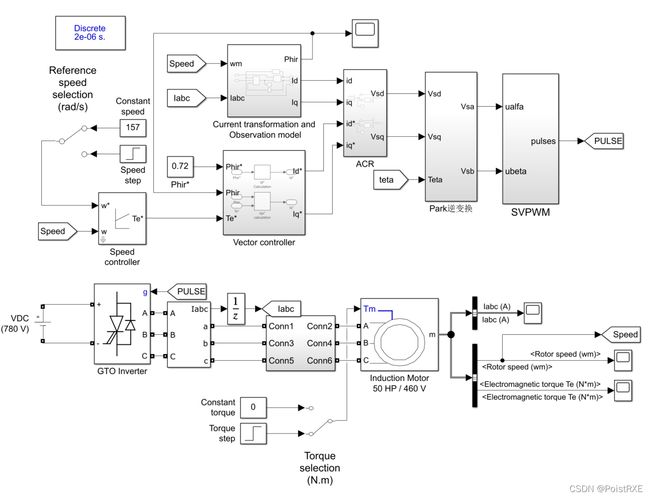
图1 MATLAB/Simulink 中交流异步电机仿真建模整体控制框图
Fig.1 Simulation modeling and overall control block diagram of AC asynchronous motor in MATLAB / Simulink
2.1 交流异步电机本体模块
在整个控制系统的仿真模型中,交流异步电机本体模块是最重要的部分,反映的是交流异步电机的本质属性。该模块采用Matlab2021a中Simscape Library提供的Asynchronous Machine模块。
2.2 矢量控制模块
交流异步电机是一个高阶、非线性、强耦合、多变量的系统,采用矢量控制方法可使之降阶、解耦,使控制方法变得更为简单、精确,使电机系统具有更优的动态品质。矢量控制的基本思想是:将定子电流分解为相互垂直的两个分量![]() 、
、![]() ,其中
,其中![]() 用以控制转子磁链,
用以控制转子磁链,![]() 用以调节电磁转矩。矢量控制的最终结果是实现定子电流的分解,对转子磁链和电磁转矩进行解耦控制。矢量控制模块实现的正是交流电机的矢量控制方法,模块的输入为转子参考磁链
用以调节电磁转矩。矢量控制的最终结果是实现定子电流的分解,对转子磁链和电磁转矩进行解耦控制。矢量控制模块实现的正是交流电机的矢量控制方法,模块的输入为转子参考磁链![]() 和参考电磁转矩
和参考电磁转矩![]() ,输出为dq两相参考电流
,输出为dq两相参考电流![]() 、
、![]() ,底层结构由如图2所示,图2中的Phir*指代
,底层结构由如图2所示,图2中的Phir*指代![]() ,Phir指代
,Phir指代![]() 。相互垂直的两相参考相电流
。相互垂直的两相参考相电流![]() 、
、![]() 的求取由方程式(6)实现,图2中模型进行了近似处理:
的求取由方程式(6)实现,图2中模型进行了近似处理:


图2 矢量控制框图
Fig.2 Vector control module
该模块应用矢量控制思想,实现了电流解耦功能,所得到的解耦电流分量![]() 、
、![]() 、可分别用于转子磁链和电磁转矩的解耦控制。
、可分别用于转子磁链和电磁转矩的解耦控制。
2.3 电流变换和磁链观测
电流变换是实现三相/两相变换,磁链观测是实现通过对定子电流进行计算来观测转子磁链的大小以及计算定子磁链的转角[1]。如图3所示为电流变换和磁链观测的结构框图,其中Flux Calculation and Teta Calculation子模块为磁链观测模块,ABC to dq conversion子模块为电流变换模块。

图3 电流变换和磁链观测框图
Fig.3 Current conversion and
flux linkage observation block diagram
如图4所示为磁链观测子模块的内部结构,Ts为采样时间,磁链观测计算方程如下:


图4 磁链观测框图
Fig.4 Flux linkage observation block diagram
如图5所示为电流变换子模块的内部结构,电流变换计算方程如下:
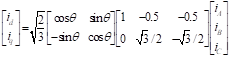
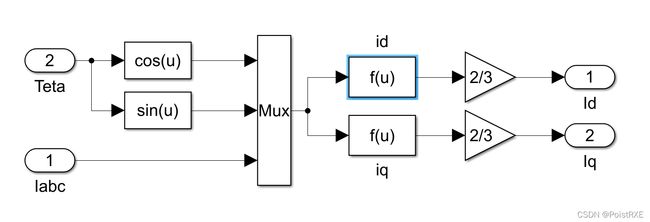
图5 电流变换框图
Fig.5 Current conversion block diagram
2.4 帕克逆变换模块
帕克逆变换模块实现的是参考相电压的 dq/ab 变换,即 dq旋转坐标系下两相参考相电压向ab静止坐标系下两相参考相电压的转换,由方程式(9)实现:
![]()
帕克逆变换模块的结构框图如图6所示,模块输入为位置信号 和 dq 两相参考电流![]() 、
、![]() ,经过方程式(9)的运算,即可求得模块输出:ab 两相参考电压
,经过方程式(9)的运算,即可求得模块输出:ab 两相参考电压![]() 、
、![]() 。
。
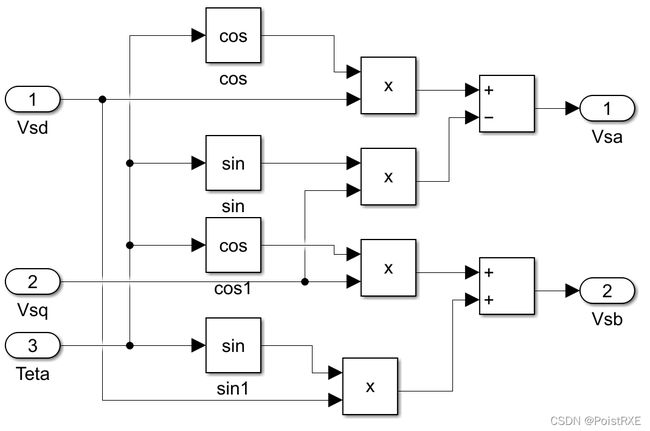
图6 帕克逆变换框图
Fig.6 Block diagram of inverse Parker transform
2.5 带电流内环控制的电源型PWM变频器
该部分义以![]() 、
、![]() 和
和![]() 、
、![]() 为输入,对电流进行内环PI控制,输出
为输入,对电流进行内环PI控制,输出![]() 、
、![]() ,进行帕克逆变换得到
,进行帕克逆变换得到![]() 、
、![]() ,再进行SVPWM控制输出控制逆变器的脉冲来控制电压逆变器工作,使其输出三相电压给异步电机供电。如图7所示为带电流内环控制的电源型PWM变频器的结构图。
,再进行SVPWM控制输出控制逆变器的脉冲来控制电压逆变器工作,使其输出三相电压给异步电机供电。如图7所示为带电流内环控制的电源型PWM变频器的结构图。

图7 带电流内环控制的电源型PWM变频器框图
Fig.7 Block diagram of power source PWM frequency converter with current inner loop control
电流内环控制模块的结构较为简单,如图8所示,单输入:参考电流和实际电流的差值,单输出:参考电压。其中,Ts 为 PI 控制器中采样时间,K为PI 控制器中 I(积分)的参数,Saturation 饱和限幅模块可将输出的参考电磁转矩的幅值限定在要求范围内。图8中是对 ![]() 和
和![]() 的差值进行PI控制输出
的差值进行PI控制输出![]() ,
, ![]() 和
和![]() 的差值进行PI控制输出
的差值进行PI控制输出![]() 类似。
类似。

图8 电流内环PI控制框图
Fig.8 Current inner loop PI control block diagram
SVPWM使用的是按转子磁链定向的矢量控制系统进行搭建,内部结构复杂,请参考[1]进行搭建。
电压逆变器实现的是逆变器功能,输入为6个SVPWM脉冲信号,输出为三相相电压![]()
,该模块采用Matlab2021a中Simscape Library提供的GTO Inverter。
2.6 速度控制模块
速度控制模块的结构较为简单,如图9所示,单输入:参考转速和实际转速的差值,单输出:参考电磁转矩![]() 。其中,Kp为 PI 控制器中 P(比例)的参数,Ki为PI 控制器中 I(积分)的参数,Ts为采样时间,Saturation 饱和限幅模块可将输出的参考电磁转矩的幅值限定在要求范围内[2]。
。其中,Kp为 PI 控制器中 P(比例)的参数,Ki为PI 控制器中 I(积分)的参数,Ts为采样时间,Saturation 饱和限幅模块可将输出的参考电磁转矩的幅值限定在要求范围内[2]。

图9 转速PI控制框图
Fig.9 Speed PI control block diagram
3 仿真结果
本文基于 MATLAB/Simulink 建立了交流异步电机控制系统的仿真模型,并对该模型进行了交流异步电机双闭环控制系统的仿真测试。交流异步电机参数:电机功率 P=37.3kw,相电压 U=550V,定子相绕组电阻 Rs=0.087Ω,转子相绕组电阻 Rr=0.228Ω,定子绕组自感 Ls=0.0355H,转子绕组自感 Lr=0.0355H,定、转子之间的互感 Lm=0.0347H , 转 动 惯 量 J = 1.622kg.m2, 额 定 转 速 ne=157r/min ,极对数 np=2。
为了验证所设计的交流异步电机控制系统仿真模型的静、动态性能,系统空载起动,待进入稳态后,在 t=2s时突加负载 Tl=200Nm,可得系统转速、转矩、a相电流和定子磁通波形如图10-13所示。

图10 转速响应波形
Fig.10 Speed response waveform

图11 转矩响应波形
Fig.11 Torque response waveform
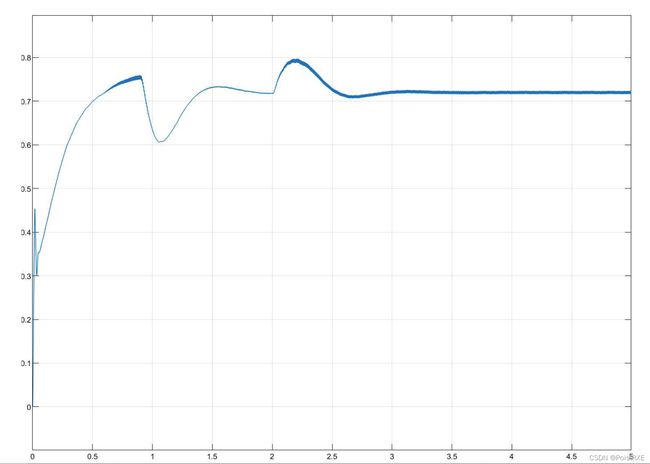
图12 定子磁通波形
Fig.12 Stator flux waveform
由仿真波形可以看出,在 ne=157r/min 的参考转速下,系统响应快速且平稳,相电流和反电动势波形较为理想。空载稳速运行时,忽略系统的摩擦转矩,此时电磁转矩均值为零;在 t=2s 时突加负载,转速发生突降,但又能迅速恢复到平衡状态,稳态运行时无静差。仿真波形图13 中,突加负载后,电磁转矩脉动稍有增大,这主要是由电流换向和带电流内环控制的电源型PWM变频器的频繁切换造成的。
4 结论
本文在分析交流异步电机数学模型的基础上,提出了一种新型的基于 MATLAB 的交流异步电机矢量控制系统仿真建模的方法,将该方法应用于 Simulink 环境下交流异步电机模型的设计,采用经典的速度、电流双闭环控制方法对该建模方法进行了测试,仿真结果表明:波形符合理论分析,系统能平稳运行,具有较好的静、动态特性。采用该交流异步电机仿真模型,可以十分便捷地实现、验证控制算法,只需对部分功能模块进行替换或修改,就可实现控制策略的改换或改进,不仅可以节省控制方案的设计周期,快速验证所设计的控制算法,更可以充分利用计算机仿真的优越性,通过修改系统参变量或人为加入不同扰动因素来考察不同实验条件下电机系统的动、静态性能,或者模拟相同的实验条件,比较不同控制策略的优劣,为分析和设计交流异步电机控制系统提供了有效的手段和工具,也为实际电机控制系统的设计和调试提供了新的思路。
参考文献
- 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社,2003.
- 纪志成,薛花,沈艳霞.基于Matlab交流异步电机矢量控制系统的仿真建模[J].系统仿真学报,2004(03):384-389.
交流电机矢量控制MATLAB仿真.rar-嵌入式文档类资源-CSDN下载交流电机交流矢量控制MATLAB仿真更多下载资源、学习资料请访问CSDN下载频道.https://download.csdn.net/download/qq_42816065/74924084