【slam十四讲第二版】【课本例题代码向】【第九讲~后端Ⅰ】【安装Meshlab】【BAL数据集格式】【ceres求解BA】【g2o求解BA】
【slam十四讲第二版】【课本例题代码向】【第九讲~后端Ⅰ】【安装Meshlab】【BAL数据集格式】【ceres求解BA】【g2o求解BA】
- 0 前言
- 1 安装Meshlab: 三维几何网格处理
- 2 BAL数据集
-
- 2.1 BAL数据集格式
- 3 使用ceres实现BA
-
- 3.1 bundle_adjustment_ceres.cpp
- 3.2 CMakeLists.txt
- 3.3 其他文件
-
- 3.3.1 残差函数SnaveReprojectionError.h
- 3.3.2 旋转变换转换rotation.h
- 3.3.3 BAL数据集处理的库函数
-
- 3.3.3.1 common.h
- 3.3.3.2 common.cpp
- 3.4 输出
- 4 实践:g2o求解BA
-
- 4.1 bundle_adjustment_g2o.cpp
- 4.2 CMakeLists.txt
- 4.3 其他文件
-
- 4.3.1 旋转变换转换rotation.h
- 4.3.2 BAL数据集处理的库函数
- 4.3.2.1 common.h
- 4.3.2.2 common.cpp
- 4.4 输出:
0 前言
- 参考:视觉SLAM十四讲CH9代码解析及课后习题详解
1 安装Meshlab: 三维几何网格处理
- 参考:视觉SLAM十四讲学习1 环境配置
- 参考:添加链接描述视觉SLAM十四讲第三方库
- 安装命令为:
sudo add-apt-repository ppa:zarquon42/meshlab
sudo apt-get update
sudo apt-get install meshlab
- 用来打开
.ply文件
2 BAL数据集
2.1 BAL数据集格式
- 详细格式请见:https://grail.cs.washington.edu/projects/bal/
- 数据格式如下:
<num_cameras> <num_points> <num_observations>
<camera_index_1> <point_index_1> <x_1> <y_1>
...
<camera_index_num_observations> <point_index_num_observations> <x_num_observations> <y_num_observations>
<camera_1>
...
<camera_num_cameras>
<point_1>
.. .
<point_num_points>
其中,相机和点索引从 0 开始。每个相机是一组 9 个参数 - R、t、f、k1 和 k2。旋转 R 被指定为Rodrigues 向量。
- 其中,第一行的数据是
相机数量、路标点的数量、观察到路标点的总数量,其中观察到路标点的总数量是所有观察到的观测点,每个相机观测到的路标点都算一个 - 然后后面是每行有4个数据,分别为
相机标号、路标点标号、x坐标、y坐标,总共有观察到路标点的总数量行 - 下面每一行只有一个数据,这里分为两部分,第一部分是相机的数据,每九行算作一组数据,分别是
- R(3个)、t(3个)、f、k1 和 k2,总共相机数量 * 9行 - 然后是第二部分,是路标点的点坐标,每三行算作一组数据,总共
路标点的数量 * 3
3 使用ceres实现BA
- 工程所需的cmake文件自取:链接: https://pan.baidu.com/s/1AIFaH4O5IMNoHeR0vW7vfQ 提取码: b0k3
- 整个工程自取链接: https://pan.baidu.com/s/117KshglyrDldFV59I8b0-A 提取码: tlbm
3.1 bundle_adjustment_ceres.cpp
#include (
// new SnavelyReprojectionError(observed_x, observed_y));
// If enabled use Huber's loss function. 如果启用,请使用Huber的损失函数。
ceres::LossFunction *loss_function = new ceres::HuberLoss(1.0);
// Each observation corresponds to a pair of a camera and a point
// which are identified by camera_index()[i] and point_index()[i]
// respectively.
// 每个观测点对应于一对相机和一个点,分别由camera_index()[i]和point_index()[i]标识。
double *camera = cameras + camera_block_size * bal_problem.camera_index()[i];
//camera_block_size = bal_problem.camera_block_size();
//*camera = cameras + bal_problem.camera_block_size() * bal_problem.camera_index()[i]
double *point = points + point_block_size * bal_problem.point_index()[i];//得到的是对应路标点在世界坐标系下的三维坐标
//point_block_size = bal_problem.point_block_size();
//*point = points + bal_problem.point_block_size() * bal_problem.point_index()[i]
problem.AddResidualBlock(cost_function, loss_function, camera, point); // 向问题中添加误差项
//CostFunction* : 描述最小二乘的基本形式即代价函数
//LossFunction* : 描述核函数的形式
}
// show some information here ...
std::cout << "bal problem file loaded..." << std::endl;//输出bal problem file loaded...
std::cout << "bal problem have " << bal_problem.num_cameras() << " cameras and "
<< bal_problem.num_points() << " points. " << std::endl;//bal_problem.num_cameras()表示相机位姿个数
//bal_problem.num_points()表示路标点数
std::cout << "Forming " << bal_problem.num_observations() << " observations. " << std::endl;// bal_problem.num_observations()表示观测点数
std::cout << "Solving ceres BA ... " << endl;//BA求解
ceres::Solver::Options options; // 这里有很多配置项可以填Options类嵌入在Solver类中 ,在Options类中可以设置关于求解器的参数
options.linear_solver_type = ceres::LinearSolverType::SPARSE_SCHUR;
// 增量方程如何求解 这里的linear_solver_type 是一个Linear_solver_type的枚举类型的变量
//使用Schur消元
options.minimizer_progress_to_stdout = true;
ceres::Solver::Summary summary;// 优化信息
ceres::Solve(options, &problem, &summary);
std::cout << summary.FullReport() << "\n";
}
3.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(bundle_adjustment_ceres)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_STANDARD 14)
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
Find_Package(G2O REQUIRED)
Find_Package(Eigen3 REQUIRED)
Find_Package(Ceres REQUIRED)
Find_Package(Sophus REQUIRED)
Find_Package(CSparse REQUIRED)
SET(G2O_LIBS g2o_csparse_extension g2o_stuff g2o_core cxsparse)
include_directories(${PROJECT_SOURCE_DIR} ${EIGEN3_INCLUDE_DIR} ${CSPARSE_INCLUDE_DIR})
add_library(bal_common src/common.cpp)
add_executable(bundle_adjustment_ceres src/bundle_adjustment_ceres.cpp)
target_link_libraries(bundle_adjustment_ceres ${CERES_LIBRARIES} bal_common)
3.3 其他文件
3.3.1 残差函数SnaveReprojectionError.h
#ifndef SnavelyReprojection_H
#define SnavelyReprojection_H
#include 3.3.2 旋转变换转换rotation.h
#ifndef ROTATION_H
#define ROTATION_H
#include 3.3.3 BAL数据集处理的库函数
3.3.3.1 common.h
#pragma once
/// 从文件读入BAL dataset
class BALProblem {
public:
/// load bal data from text file
explicit BALProblem(const std::string &filename, bool use_quaternions = false);
~BALProblem() {
delete[] point_index_;
delete[] camera_index_;
delete[] observations_;
delete[] parameters_;
}
/// save results to text file
void WriteToFile(const std::string &filename) const;
/// save results to ply pointcloud
void WriteToPLYFile(const std::string &filename) const;
void Normalize();
void Perturb(const double rotation_sigma,
const double translation_sigma,
const double point_sigma);
int camera_block_size() const { return use_quaternions_ ? 10 : 9; }
int point_block_size() const { return 3; }
int num_cameras() const { return num_cameras_; }
int num_points() const { return num_points_; }
int num_observations() const { return num_observations_; }
int num_parameters() const { return num_parameters_; }
const int *point_index() const { return point_index_; }
const int *camera_index() const { return camera_index_; }
const double *observations() const { return observations_; }
const double *parameters() const { return parameters_; }
const double *cameras() const { return parameters_; }
const double *points() const { return parameters_ + camera_block_size() * num_cameras_; }
/// camera参数的起始地址
double *mutable_cameras() { return parameters_; }
double *mutable_points() { return parameters_ + camera_block_size() * num_cameras_; }
double *mutable_camera_for_observation(int i) {
return mutable_cameras() + camera_index_[i] * camera_block_size();
}
double *mutable_point_for_observation(int i) {
return mutable_points() + point_index_[i] * point_block_size();
}
const double *camera_for_observation(int i) const {
return cameras() + camera_index_[i] * camera_block_size();
}
const double *point_for_observation(int i) const {
return points() + point_index_[i] * point_block_size();
}
private:
void CameraToAngelAxisAndCenter(const double *camera,
double *angle_axis,
double *center) const;
void AngleAxisAndCenterToCamera(const double *angle_axis,
const double *center,
double *camera) const;
int num_cameras_;
int num_points_;
int num_observations_;
int num_parameters_;
bool use_quaternions_;
int *point_index_; // 每个observation对应的point index
int *camera_index_; // 每个observation对应的camera index
double *observations_;
double *parameters_;
};
3.3.3.2 common.cpp
#include 3.4 输出
/home/bupo/my_study/slam14/slam14_my/cap9/bundle_adjustment_ceres/cmake-build-release/bundle_adjustment_ceres src/problem-16-22106-pre.txt
Header: 16 22106 83718bal problem file loaded...
bal problem have 16 cameras and 22106 points.
Forming 83718 observations.
Solving ceres BA ...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.842900e+07 0.00e+00 2.04e+06 0.00e+00 0.00e+00 1.00e+04 0 5.30e-02 1.66e-01
1 1.449093e+06 1.70e+07 1.75e+06 2.16e+03 1.84e+00 3.00e+04 1 1.18e-01 2.85e-01
2 5.848543e+04 1.39e+06 1.30e+06 1.55e+03 1.87e+00 9.00e+04 1 1.03e-01 3.88e-01
3 1.581483e+04 4.27e+04 4.98e+05 4.98e+02 1.29e+00 2.70e+05 1 1.02e-01 4.90e-01
4 1.251823e+04 3.30e+03 4.64e+04 9.96e+01 1.11e+00 8.10e+05 1 1.02e-01 5.91e-01
5 1.240936e+04 1.09e+02 9.78e+03 1.33e+01 1.42e+00 2.43e+06 1 1.02e-01 6.93e-01
6 1.237699e+04 3.24e+01 3.91e+03 5.04e+00 1.70e+00 7.29e+06 1 1.01e-01 7.95e-01
7 1.236187e+04 1.51e+01 1.96e+03 3.40e+00 1.75e+00 2.19e+07 1 1.01e-01 8.96e-01
8 1.235405e+04 7.82e+00 1.03e+03 2.40e+00 1.76e+00 6.56e+07 1 1.02e-01 9.98e-01
9 1.234934e+04 4.71e+00 5.04e+02 1.67e+00 1.87e+00 1.97e+08 1 1.02e-01 1.10e+00
10 1.234610e+04 3.24e+00 4.31e+02 1.15e+00 1.88e+00 5.90e+08 1 1.02e-01 1.20e+00
11 1.234386e+04 2.24e+00 3.27e+02 8.44e-01 1.90e+00 1.77e+09 1 1.02e-01 1.30e+00
12 1.234232e+04 1.54e+00 3.44e+02 6.69e-01 1.82e+00 5.31e+09 1 1.05e-01 1.41e+00
13 1.234126e+04 1.07e+00 2.21e+02 5.45e-01 1.91e+00 1.59e+10 1 1.06e-01 1.51e+00
14 1.234047e+04 7.90e-01 1.12e+02 4.84e-01 1.87e+00 4.78e+10 1 1.03e-01 1.62e+00
15 1.233986e+04 6.07e-01 1.02e+02 4.22e-01 1.95e+00 1.43e+11 1 1.02e-01 1.72e+00
16 1.233934e+04 5.22e-01 1.03e+02 3.82e-01 1.97e+00 4.30e+11 1 1.02e-01 1.82e+00
17 1.233891e+04 4.25e-01 1.07e+02 3.46e-01 1.93e+00 1.29e+12 1 1.01e-01 1.92e+00
18 1.233855e+04 3.59e-01 1.04e+02 3.15e-01 1.96e+00 3.87e+12 1 1.03e-01 2.03e+00
19 1.233825e+04 3.06e-01 9.27e+01 2.88e-01 1.98e+00 1.16e+13 1 1.02e-01 2.13e+00
20 1.233799e+04 2.61e-01 1.17e+02 2.16e-01 1.97e+00 3.49e+13 1 1.02e-01 2.23e+00
21 1.233777e+04 2.18e-01 1.22e+02 1.15e-01 1.97e+00 1.05e+14 1 1.01e-01 2.33e+00
22 1.233760e+04 1.73e-01 1.10e+02 9.67e-02 1.89e+00 3.14e+14 1 1.02e-01 2.43e+00
23 1.233746e+04 1.37e-01 1.14e+02 1.11e-01 1.98e+00 9.41e+14 1 1.02e-01 2.54e+00
24 1.233735e+04 1.13e-01 1.17e+02 1.96e-01 1.96e+00 2.82e+15 1 1.02e-01 2.64e+00
25 1.233735e+04 0.00e+00 1.17e+02 0.00e+00 0.00e+00 1.41e+15 1 3.65e-02 2.67e+00
WARNING: Logging before InitGoogleLogging() is written to STDERR
W0725 09:28:28.405835 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
26 1.233725e+04 9.50e-02 1.20e+02 3.98e-01 1.99e+00 4.24e+15 1 1.02e-01 2.78e+00
27 1.233725e+04 0.00e+00 1.20e+02 0.00e+00 0.00e+00 2.12e+15 1 3.71e-02 2.81e+00
W0725 09:28:28.545459 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
28 1.233725e+04 0.00e+00 1.20e+02 0.00e+00 0.00e+00 5.30e+14 1 3.47e-02 2.85e+00
W0725 09:28:28.580186 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
29 1.233718e+04 6.92e-02 5.76e+01 1.59e-01 1.70e+00 1.59e+15 1 9.89e-02 2.95e+00
30 1.233714e+04 3.65e-02 5.80e+01 6.25e-01 1.93e+00 4.77e+15 1 1.06e-01 3.05e+00
W0725 09:28:28.822146 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
31 1.233714e+04 0.00e+00 5.80e+01 0.00e+00 0.00e+00 2.38e+15 1 3.72e-02 3.09e+00
32 1.233714e+04 0.00e+00 5.80e+01 0.00e+00 0.00e+00 5.96e+14 1 3.50e-02 3.13e+00
W0725 09:28:28.857184 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
33 1.233711e+04 3.32e-02 5.99e+01 2.01e-01 2.00e+00 1.79e+15 1 9.95e-02 3.22e+00
34 1.233708e+04 3.14e-02 6.02e+01 3.64e-01 2.00e+00 5.36e+15 1 1.05e-01 3.33e+00
35 1.233708e+04 0.00e+00 6.02e+01 0.00e+00 0.00e+00 2.68e+15 1 3.72e-02 3.37e+00
W0725 09:28:29.098881 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
36 1.233708e+04 0.00e+00 6.02e+01 0.00e+00 0.00e+00 6.70e+14 1 3.50e-02 3.40e+00
W0725 09:28:29.133908 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
37 1.233705e+04 2.50e-02 2.04e+01 1.37e-01 1.68e+00 2.01e+15 1 1.01e-01 3.50e+00
38 1.233704e+04 1.58e-02 2.01e+01 4.77e-01 1.95e+00 6.03e+15 1 1.08e-01 3.61e+00
W0725 09:28:29.379166 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
39 1.233704e+04 0.00e+00 2.01e+01 0.00e+00 0.00e+00 3.02e+15 1 3.70e-02 3.65e+00
40 1.233704e+04 0.00e+00 2.01e+01 0.00e+00 0.00e+00 7.54e+14 1 3.51e-02 3.68e+00
W0725 09:28:29.414316 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
41 1.233702e+04 1.51e-02 2.07e+01 3.02e-01 2.00e+00 2.26e+15 1 9.98e-02 3.78e+00
42 1.233701e+04 1.48e-02 2.00e+01 1.14e+00 1.99e+00 6.79e+15 1 1.07e-01 3.89e+00
43 1.233701e+04 0.00e+00 2.00e+01 0.00e+00 0.00e+00 3.39e+15 1 3.75e-02 3.93e+00
W0725 09:28:29.658689 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
44 1.233701e+04 0.00e+00 2.00e+01 0.00e+00 0.00e+00 8.48e+14 1 3.53e-02 3.96e+00
W0725 09:28:29.694017 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
45 1.233700e+04 1.42e-02 2.09e+01 2.20e-01 1.99e+00 2.54e+15 1 1.01e-01 4.06e+00
46 1.233698e+04 1.39e-02 1.88e+01 1.65e+00 2.00e+00 7.63e+15 1 1.05e-01 4.17e+00
W0725 09:28:29.937575 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
47 1.233698e+04 0.00e+00 1.88e+01 0.00e+00 0.00e+00 3.82e+15 1 3.72e-02 4.21e+00
48 1.233698e+04 0.00e+00 1.88e+01 0.00e+00 0.00e+00 9.54e+14 1 3.50e-02 4.24e+00
W0725 09:28:29.972617 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
49 1.233697e+04 1.36e-02 2.14e+01 3.81e-01 2.00e+00 2.86e+15 1 1.00e-01 4.34e+00
W0725 09:28:30.109880 5092 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite.
50 1.233697e+04 0.00e+00 2.14e+01 0.00e+00 0.00e+00 1.43e+15 1 3.69e-02 4.38e+00
Solver Summary (v 2.0.0-eigen-(3.3.9)-lapack-suitesparse-(5.1.2)-cxsparse-(3.1.9)-eigensparse-no_openmp)
Original Reduced
Parameter blocks 22122 22122
Parameters 66462 66462
Residual blocks 83718 83718
Residuals 167436 167436
Minimizer TRUST_REGION
Sparse linear algebra library SUITE_SPARSE
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver SPARSE_SCHUR SPARSE_SCHUR
Threads 1 1
Linear solver ordering AUTOMATIC 22106,16
Schur structure 2,3,9 2,3,9
Cost:
Initial 1.842900e+07
Final 1.233697e+04
Change 1.841667e+07
Minimizer iterations 51
Successful steps 37
Unsuccessful steps 14
Time (in seconds):
Preprocessor 0.113155
Residual only evaluation 0.447670 (36)
Jacobian & residual evaluation 1.553284 (37)
Linear solver 1.851589 (50)
Minimizer 4.267012
Postprocessor 0.005809
Total 4.385978
Termination: NO_CONVERGENCE (Maximum number of iterations reached. Number of iterations: 50.)
进程已结束,退出代码0
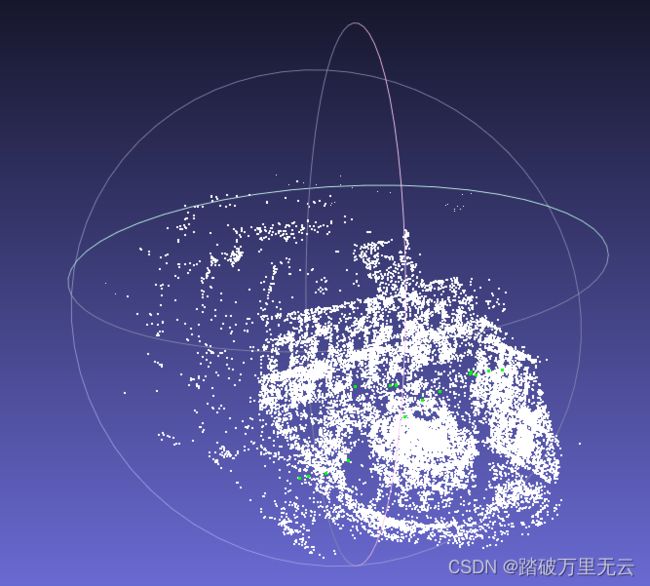
-
initial.ply
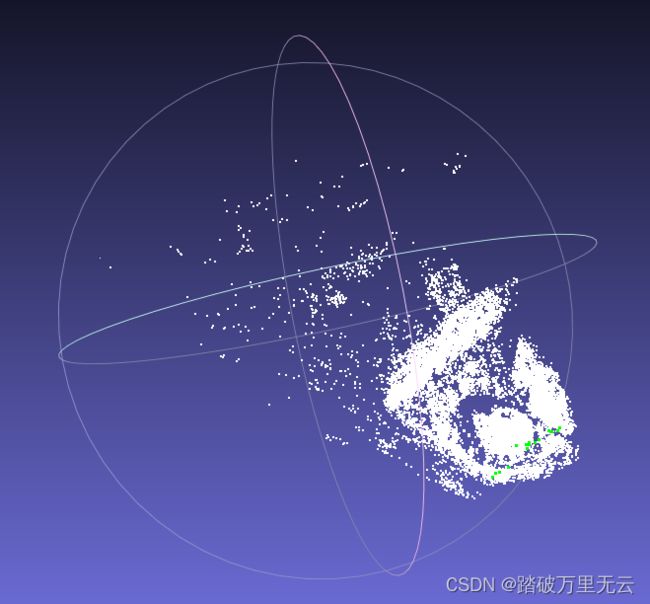
-
final.ply
4 实践:g2o求解BA
- 工程所需的cmake文件自取:链接: https://pan.baidu.com/s/1AIFaH4O5IMNoHeR0vW7vfQ 提取码: b0k3
- 整个工程自取:链接: https://pan.baidu.com/s/1a7DQtQLh7hBHSTYeS1UPjQ 提取码: 52s3
4.1 bundle_adjustment_g2o.cpp
#include 4.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(bundle_adjustment_ceres)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_STANDARD 14)
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
include_directories(
"/usr/include/eigen3"
)
Find_Package(G2O REQUIRED)
Find_Package(Eigen3 REQUIRED)
Find_Package(Ceres REQUIRED)
Find_Package(Sophus REQUIRED)
Find_Package(CSparse REQUIRED)
SET(G2O_LIBS g2o_core g2o_stuff g2o_types_sba g2o_csparse_extension g2o_types_slam3d cxsparse)
include_directories(${PROJECT_SOURCE_DIR} ${EIGEN3_INCLUDE_DIR} ${CSPARSE_INCLUDE_DIR}
${G2O_INCLUDE_DIRECTORIES}
${Sophus_INCLUDE_DIRECTORIES}
)
add_library(bal_common src/common.cpp)
add_executable(bundle_adjustment_ceres src/bundle_adjustment_g2o.cpp)
target_link_libraries(bundle_adjustment_ceres bal_common
${G2O_LIBS}
${CSPARSE_LIBRARY}
${Sophus_LIBRARIES} fmt
)
4.3 其他文件
4.3.1 旋转变换转换rotation.h
- 参考3.3.2
4.3.2 BAL数据集处理的库函数
4.3.2.1 common.h
- 参考3.3.3.1
4.3.2.2 common.cpp
- 参考3.3.3.2
4.4 输出:
/home/bupo/my_study/slam14/slam14_my/cap9/bundle_adjustment_g2o/cmake-build-debug/bundle_adjustment_ceres ./src/problem-16-22106-pre.txt
Header: 16 22106 83718iteration= 0 chi2= 8894423.022949 time= 0.226057 cumTime= 0.226057 edges= 83718 schur= 1 lambda= 227.832660 levenbergIter= 1
iteration= 1 chi2= 1772145.050517 time= 0.199289 cumTime= 0.425347 edges= 83718 schur= 1 lambda= 75.944220 levenbergIter= 1
iteration= 2 chi2= 752585.293391 time= 0.199969 cumTime= 0.625315 edges= 83718 schur= 1 lambda= 25.314740 levenbergIter= 1
iteration= 3 chi2= 402814.243627 time= 0.199741 cumTime= 0.825056 edges= 83718 schur= 1 lambda= 8.438247 levenbergIter= 1
iteration= 4 chi2= 284879.378894 time= 0.199375 cumTime= 1.02443 edges= 83718 schur= 1 lambda= 2.812749 levenbergIter= 1
iteration= 5 chi2= 238356.214415 time= 0.198267 cumTime= 1.2227 edges= 83718 schur= 1 lambda= 0.937583 levenbergIter= 1
iteration= 6 chi2= 193550.755079 time= 0.198764 cumTime= 1.42146 edges= 83718 schur= 1 lambda= 0.312528 levenbergIter= 1
iteration= 7 chi2= 146859.909574 time= 0.198121 cumTime= 1.61958 edges= 83718 schur= 1 lambda= 0.104176 levenbergIter= 1
iteration= 8 chi2= 122887.700218 time= 0.199035 cumTime= 1.81862 edges= 83718 schur= 1 lambda= 0.069451 levenbergIter= 1
iteration= 9 chi2= 97810.139925 time= 0.198906 cumTime= 2.01753 edges= 83718 schur= 1 lambda= 0.046300 levenbergIter= 1
iteration= 10 chi2= 80329.940265 time= 0.198727 cumTime= 2.21625 edges= 83718 schur= 1 lambda= 0.030867 levenbergIter= 1
iteration= 11 chi2= 65663.994405 time= 0.197927 cumTime= 2.41418 edges= 83718 schur= 1 lambda= 0.020578 levenbergIter= 1
iteration= 12 chi2= 55960.726637 time= 0.198214 cumTime= 2.61239 edges= 83718 schur= 1 lambda= 0.013719 levenbergIter= 1
iteration= 13 chi2= 53275.547797 time= 0.198422 cumTime= 2.81082 edges= 83718 schur= 1 lambda= 0.009146 levenbergIter= 1
iteration= 14 chi2= 35983.312124 time= 0.243725 cumTime= 3.05454 edges= 83718 schur= 1 lambda= 0.006097 levenbergIter= 2
iteration= 15 chi2= 32091.891518 time= 0.28862 cumTime= 3.34316 edges= 83718 schur= 1 lambda= 0.016259 levenbergIter= 3
iteration= 16 chi2= 31156.262647 time= 0.242385 cumTime= 3.58555 edges= 83718 schur= 1 lambda= 0.021679 levenbergIter= 2
iteration= 17 chi2= 30773.139623 time= 0.198416 cumTime= 3.78396 edges= 83718 schur= 1 lambda= 0.014453 levenbergIter= 1
iteration= 18 chi2= 29079.563460 time= 0.245161 cumTime= 4.02912 edges= 83718 schur= 1 lambda= 0.012488 levenbergIter= 2
iteration= 19 chi2= 28484.154313 time= 0.242993 cumTime= 4.27212 edges= 83718 schur= 1 lambda= 0.016651 levenbergIter= 2
iteration= 20 chi2= 28445.405201 time= 0.197765 cumTime= 4.46988 edges= 83718 schur= 1 lambda= 0.011101 levenbergIter= 1
iteration= 21 chi2= 27170.592543 time= 0.243497 cumTime= 4.71338 edges= 83718 schur= 1 lambda= 0.011118 levenbergIter= 2
iteration= 22 chi2= 26748.191194 time= 0.243523 cumTime= 4.9569 edges= 83718 schur= 1 lambda= 0.014824 levenbergIter= 2
iteration= 23 chi2= 26675.118188 time= 0.198495 cumTime= 5.1554 edges= 83718 schur= 1 lambda= 0.009883 levenbergIter= 1
iteration= 24 chi2= 26087.985781 time= 0.242708 cumTime= 5.3981 edges= 83718 schur= 1 lambda= 0.010281 levenbergIter= 2
iteration= 25 chi2= 25875.818536 time= 0.24327 cumTime= 5.64137 edges= 83718 schur= 1 lambda= 0.013708 levenbergIter= 2
iteration= 26 chi2= 25831.564925 time= 0.197571 cumTime= 5.83894 edges= 83718 schur= 1 lambda= 0.009139 levenbergIter= 1
iteration= 27 chi2= 25568.344873 time= 0.243723 cumTime= 6.08267 edges= 83718 schur= 1 lambda= 0.011118 levenbergIter= 2
iteration= 28 chi2= 25455.865005 time= 0.243181 cumTime= 6.32585 edges= 83718 schur= 1 lambda= 0.011781 levenbergIter= 2
iteration= 29 chi2= 25454.942053 time= 0.197301 cumTime= 6.52315 edges= 83718 schur= 1 lambda= 0.007854 levenbergIter= 1
iteration= 30 chi2= 25260.709796 time= 0.244192 cumTime= 6.76734 edges= 83718 schur= 1 lambda= 0.009148 levenbergIter= 2
iteration= 31 chi2= 25171.392636 time= 0.243542 cumTime= 7.01089 edges= 83718 schur= 1 lambda= 0.009425 levenbergIter= 2
iteration= 32 chi2= 25104.160294 time= 0.243352 cumTime= 7.25424 edges= 83718 schur= 1 lambda= 0.008637 levenbergIter= 2
iteration= 33 chi2= 25042.986799 time= 0.242833 cumTime= 7.49707 edges= 83718 schur= 1 lambda= 0.008765 levenbergIter= 2
iteration= 34 chi2= 24984.677998 time= 0.243707 cumTime= 7.74078 edges= 83718 schur= 1 lambda= 0.005949 levenbergIter= 2
iteration= 35 chi2= 24943.879912 time= 0.244234 cumTime= 7.98501 edges= 83718 schur= 1 lambda= 0.007933 levenbergIter= 2
iteration= 36 chi2= 24886.075504 time= 0.243852 cumTime= 8.22886 edges= 83718 schur= 1 lambda= 0.005674 levenbergIter= 2
iteration= 37 chi2= 24868.088225 time= 0.242916 cumTime= 8.47178 edges= 83718 schur= 1 lambda= 0.007565 levenbergIter= 2
iteration= 38 chi2= 24833.053138 time= 0.244644 cumTime= 8.71642 edges= 83718 schur= 1 lambda= 0.008448 levenbergIter= 2
iteration= 39 chi2= 24815.047826 time= 0.245233 cumTime= 8.96166 edges= 83718 schur= 1 lambda= 0.009766 levenbergIter= 2
进程已结束,退出代码0
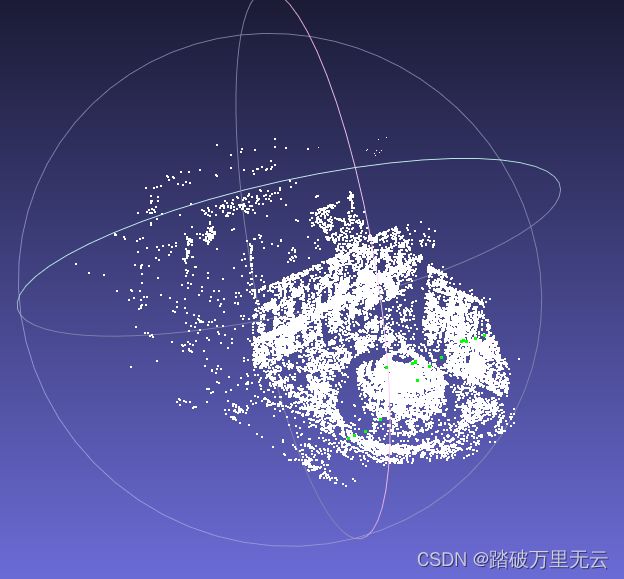
- initial.ply
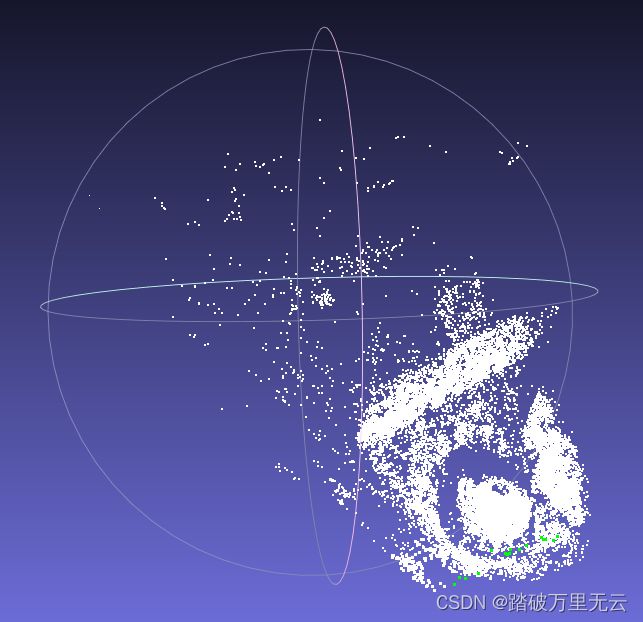
- final.ply