ROS调用USB双目摄像头模组
本篇文章内容大多来自古月居的
ROS&OpenCV下单目和双目摄像头的标定与使用
但这篇文章代码漏洞太多,严重影响正常实现,故把自己跑通的过程及代码写在下面:
双目摄像头
首先得确认你的双目摄像头属于独立的还是合成的
独立图像的双目摄像头:使用的双目摄像头在计算机中是按两个独立的设备呈现的。这种比较简单,分别作为一个ros_node发布即可。
合成图像的双目摄像头:使用的双目摄像头在计算机上是一个设备,即将两个摄像头的图像合成为了一副图像,此时需要先将一幅图分割为左右两幅,再分别作为一个ros_node发布。

我的是合成图形的双目摄像头(市场上好像大多也都是这种),所以下面只有合成图像双目的解决方案。
安装usb_cam包
sudo apt install ros-melodic-usb-cam*
该包将摄像头的图像通过sensor_msgs::Image消息发布。
安装好usb_cam包后,在/opt/ros/melodic/share/usb_cam/launch中会存在一个usb_cam-test.launch文件,在该文件中启动两个ROS节点,usb_cam_node和image_view。在文件里就可以为usb_cam_node配置参数。

我们主要改的就是方框中的三个参数。
使用下面的命令查看你的摄像头设备号(把usb相机插拔前后看看哪个设备号变化了):
ls /dev/video*

可以看到我有两个video文件,不过只有给video_device设置成**/dev/video0才可以正常使用。而合成图像的双目理论上本不应该出现的/dev/video1会报错(我的电脑没有自带摄像头),不知道/dev/video1**存在的意义是什么?如果有大神路过的话跪求解答一下!!!
然后是另两个参数,也就算图像分辨率。一个摄像头图像的分辨率是1280*720,这里因为自动把两个摄像头图像合到一起去了,所以最终得到的是2560*720的分辨率。
(当然你也可以设置成1280*720,只不过待会儿只显示一幅图像并且没办法分割后变成了半副就是了【手动狗头】)
打开双目
roscore
roslaunch usb_cam usb_cam-test.launch

可以看一下rostopic:

这里有一个要注意的点:
确定你的相机支持的是什么格式的图片,usb_cam-test.launch 里默认是yuyv
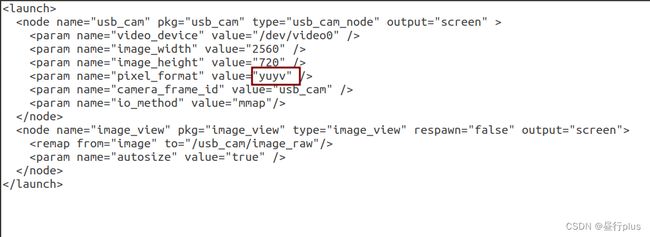
usb_cam支持mjpeg, yuyv, uyvy三种格式,可以自己定义一个launch文件来修改一下参数。如果格式不对可能导致图片帧率下降!
ROS工程 – 分割双目图像
1.创建工作空间并初始化
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg camera_split cv_bridge image_transport roscpp sensor_msgs std_msgs camera_info_manager
3.修改camera_split包的CMakeLists.txt文件,修改include_directories:
find_package(OpenCV REQUIRED)
#修改include_directories:
include_directories (
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
#添加可执行文件
add_executable(camera_split_node src/camera_split.cpp )
#指定链接库
target_link_libraries(camera_split_node
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
4.创建源代码文件
camera_split.cpp
//
// Created by daybeha on 2022/1/27.
//
#include 5.创建launch文件
camera_split_no_calibration.launch
<launch>
<node pkg="camera_split" type="camera_split_node" name="camera_split_node" output="screen" />
<node pkg="image_view" type="image_view" name="image_view_left" respawn="false" output="screen">
<remap from="image" to="/left_cam/image_raw"/>
<param name="autosize" value="true" />
node>
<node pkg="image_view" type="image_view" name="image_view_right" respawn="false" output="screen">
<remap from="image" to="/right_cam/image_raw"/>
<param name="autosize" value="true" />
node>
launch>
6.运行看看效果
cd catkin_ws
catkin_make
source ./devel/setup.bash
roslaunch camera_split camera_split_no_calibration.launch
然后终于能看到古月居贴的这张图的效果啦:
下面我们来标定:
OpenCV版
Matlab版
之后我们将进行ORB-SLAM2的测试(ORB-SLAM3类似)
参考
ROS下单目摄像头的Calibration
【ROS实践入门(八)ROS使用USB视觉传感器相机】