opencv——霍夫变换—圆检测
目录
-
- 原理
- API
- 代码编写
原理
如果圆心在原点,那么 x^2 + y^2 = r^2
如果圆心不在原点,那么(x - a)^2 + (y - b) ^ 2 = r^2
转换为极坐标,公式如下
(a,b)为圆心坐标
如果我们不知道圆心的坐标,那么就可以根据圆上的点和已知的半径进行反推
如下图

随机找三个点,那么相同半径下,这三个圆会相交在圆心。
通过rgb相加,交点的像素值会很大,看上去最亮,这个点就是原点。
API
void HoughCircles(InputArray image,
OutputArray circles,
int method,
double dp,
double minDist,
double param1 = 100,
double param2 = 100,
int minRadius = 0,
int maxRadius = 0
)
含义如下
//第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。
//第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。
//第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。
//第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。
//第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。
//第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。
//第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。
//第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。
//第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。
//需要注意的是,使用此函数可以很容易地检测出圆的圆心,但是它可能找不到合适的圆半径
代码编写
因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波。
基于效率考虑,Opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
-
- 检测边缘,发现可能的圆心
-
- 基于第一步的基础上从候选圆心开始计算最佳半径大小
#define INPUT_TITLE "input image" // 宏定义,原始图片
#define OUTPUT_TITLE "HoughCircle picture" // 宏定义,经过霍夫圆变换后的图片
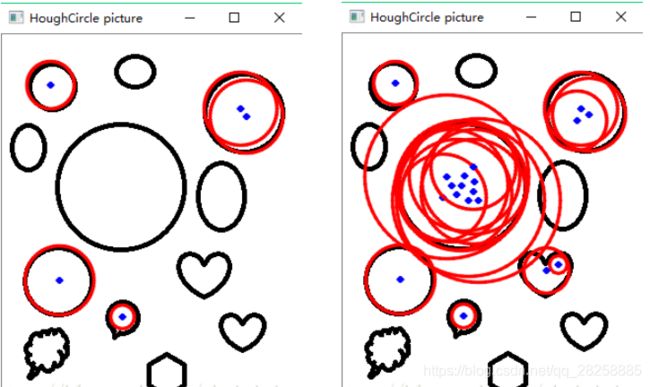
#include效果图如下,三个通过按住shift生成的圆都被识别出来了,至于个头最大的那个,是因为设置的识别最大的圆半径限制在50以内:如果把50改成150,就变成后面那个了。
HoughCircles(change_src, pcircles, CV_HOUGH_GRADIENT, 1, 10, 100, 30, 5, 50);