1) 极/最大似然估计 MLE
给定一堆数据,假如我们知道它是从某一种分布中随机取出来的,可是我们并不知道这个分布具体的参,即“模型已定,参数未知”。例如,我们知道这个分布是正态分布,但是不知道均值和方差;或者是二项分布,但是不知道均值。 最大似然估计(MLE,Maximum Likelihood Estimation)就可以用来估计模型的参数。MLE的目标是找出一组参数,使得模型产生出观测数据的概率最大:
其中 就是似然函数,表示在参数
就是似然函数,表示在参数 下出现观测数据的概率。我们假设每个观测数据是独立的,那么有
下出现观测数据的概率。我们假设每个观测数据是独立的,那么有

为了求导方便,一般对目标取log。 所以最优化对似然函数等同于最优化对数似然函数:

例子1:举一个抛硬币的简单例子。 现在有一个正反面不是很匀称的硬币,如果正面朝上记为H,方面朝上记为T,抛10次的结果如下:

求这个硬币正面朝上的概率有多大?
很显然这个概率是0.2。现在我们用MLE的思想去求解它。我们知道每次抛硬币都是一次二项分布,设正面朝上的概率是,那么似然函数为:

x=1表示正面朝上,x=0表示方面朝上。那么有:
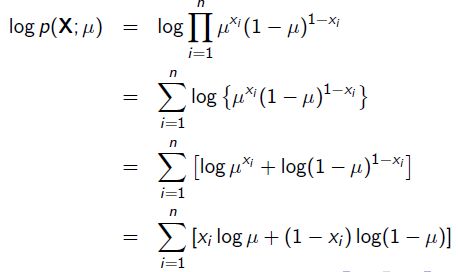
求导:
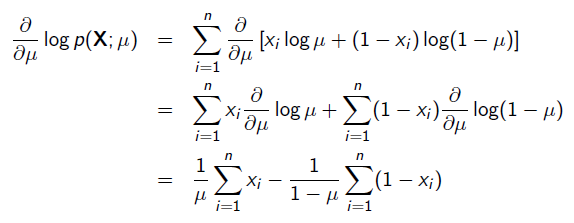
令导数为0,很容易得到:

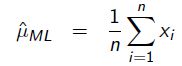

也就是0.2 。
总结一下:求极大似然函数估计值的一般步骤
(1) 写出似然函数;
(2) 对似然函数取对数,并整理;
(3) 求导数;
(4) 解似然方程 。
例子2:假如一个盒子里面有红黑共10个球,每次有放回的取出,取了10次,结果为7次黑球,3次红球。问拿出黑球的概率 p 是多少?
我们假设7次黑球,3次红球为事件 A ,一个理所当然的想法就是既然事件 A已经发生了,那么事件 A 发生的概率应该最大。所以既然事件 A 的结果已定, 我们就有理由相信这不是一个偶然发生的事件,这个已发生的事件肯定一定程度上反映了黑球在整体中的比例。所以我们要让模型产生这个整体事件的概率最大,我们把这十次抽取看成一个整体事件 A ,很明显事件 A 发生的概率是每个子事件概率之积。我们把 P(A) 看成一个关于 p 的函数,求 P(A) 取最大值时的 p ,这就是极大似然估计的思想。具体公式化描述为P(A)=p^7*(1-p)^3。
接下来就是取对数转换为累加,然后通过求导令式子为0来求极值,求出p的结果。
MLE是频率学派模型参数估计的常用方法。
-顾名思义:似然,可以简单理解为概率、可能性,也就是说要最大化该事件发生的可能性
-根据已知样本,希望通过调整模型参数来使得模型能够最大化样本情况出现的概率。
(2)最大后验概率估计(MAP)
-是贝叶斯派模型参数估计的常用方法。
-顾名思义:就是最大化在给定数据样本的情况下模型参数的后验概率
-依然是根据已知样本,来通过调整模型参数使得模型能够产生该数据样本的概率最大,只不过对于模型参数有了一个先验假设,即模型参数可能满足某种分布,不再一味地依赖数据样例(万一数据量少或者数据不靠谱呢)。
例子1:在这里举个掷硬币的例子:抛一枚硬币10次,有10次正面朝上,0次反面朝上。问正面朝上的概率p。
在频率学派来看,利用极大似然估计可以得到 p= 10 / 10 = 1.0。显然当缺乏数据时MLE可能会产生严重的偏差。
如果我们利用极大后验概率估计来看这件事,先验认为大概率下这个硬币是均匀的 (例如最大值取在0.5处的Beta分布),那么P(p|X),是一个分布,最大值会介于0.5~1之间,而不是武断的给出p= 1。显然,随着数据量的增加,参数分布会更倾向于向数据靠拢,先验假设的影响会越来越小。
MAP优化的是一个后验概率,即给定了观测值后使概率最大:

把上式根据贝叶斯公式展开:
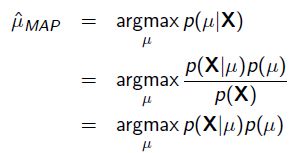
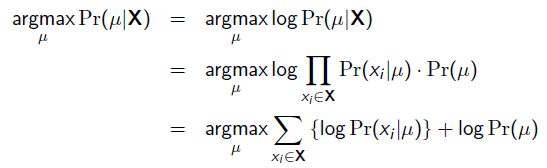
我们可以看出第一项 就是似然函数,第二项
就是似然函数,第二项 就是参数的先验知识。取log之后就是:
就是参数的先验知识。取log之后就是:
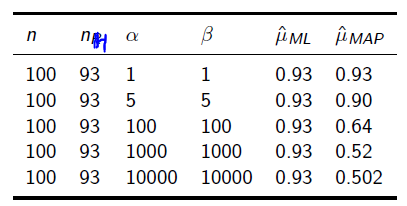
回到刚才的抛硬币例子,假设参数有一个先验估计,它服从Beta分布(见后),即:

而每次抛硬币任然服从二项分布:

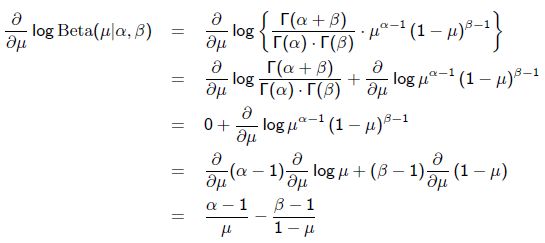
那么,目标函数的导数为:

求导的第一项已经在上面MLE中给出了,第二项为:
令导数为0,求解为:

其中, 表示正面朝上的次数。这里看以看出,MLE与MAP的不同之处在于,MAP的结果多了一些先验分布的参数。
表示正面朝上的次数。这里看以看出,MLE与MAP的不同之处在于,MAP的结果多了一些先验分布的参数。
————————————————————————————————————
补充知识: Beta分布
Beat分布是一种常见的先验分布,它形状由两个参数控制,定义域为[0,1]
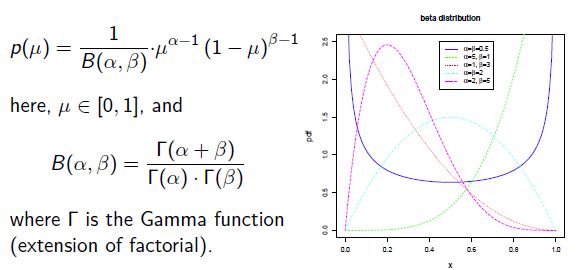
Beta分布的最大值是x等于 的时候:
的时候:
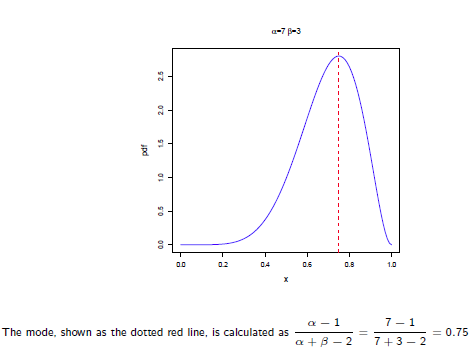
所以在抛硬币中,如果先验知识是说硬币是匀称的,那么就让 。 但是很显然即使它们相等,它两的值也对最终结果很有影响。它两的值越大,表示偏离匀称的可能性越小:
。 但是很显然即使它们相等,它两的值也对最终结果很有影响。它两的值越大,表示偏离匀称的可能性越小:
(3)MAP和MLE的区别和联系
极大后验估计(Maximum A Posterior, MAP)
上述最大似然估计有一个问题,就是没有考虑到模型本身的概率分布。
极大似然估计是求使得P(x|θ)取最大值的θ值,而极大后验概率是求使得P(x|θ)p(θ),即P(θ|x),取最大值的θθ值.
由贝叶斯定理:![]()
最大似然估计可以理解为当先验概率P(θ)P(θ)为均匀分布时的极大后验估计器。极大后验估计根据经验数据获得对难以观察的量的点估计。与最大似然估计类似,但是最大的不同是,最大后验估计融入了要估计量的先验分布在其中,可看做是规则化的最大似然估计。 
注:最大后验估计可以看做贝叶斯估计的一种特定形式。
MAP函数的求解和MLE函数的求解方法相同,都是先取对数,然后通过微分求解。MAP与MLE最大区别是MAP中加入了模型参数本身的概率分布,或者说。MLE中认为模型参数本身的概率的是均匀的,即该概率为一个固定值。
(4)最小二乘法
最小二乘法(Least Square)
通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。最小二乘法还可用于曲线拟合。

求解:多元函数求极值的方法,对θ求偏导,让偏导等于0,求出θ值。当θ为向量时,需要对各个θi求偏导计算。