星火计划学习笔记——第二讲(Apollo自动驾驶调试及仿真实践)
目录
1.自动驾驶开发流程
2.Apollo调试工具的使用
2.1启动Dreamview
2.2播放数据包
2.3PNC Monitor
2.4Cyber Monitor
2.5日志
2.6本章小结
3.Apollo仿真工具的使用
4.场景工具的使用
4.1 个人场景编辑
4.2 参数调整
4.3 本章小结
5. 学习记录
声明
1.自动驾驶开发流程
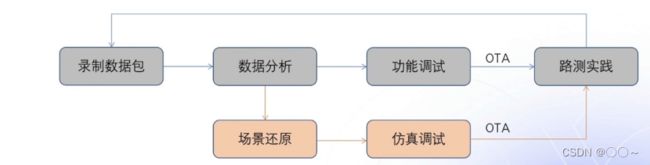
图 1.1自动驾驶开发流程图
2.Apollo调试工具的使用
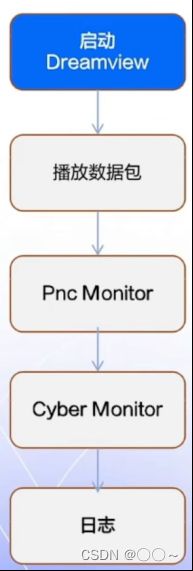
图 2.1调试流程图
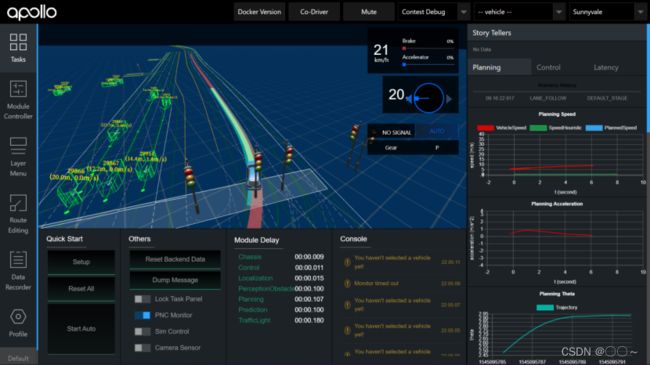
2.1启动Dreamview
Dreamview 是 Apolo 提供的可视化交互界面,开发者可通过 Dreamview 对车辆硬件、各自动驾驶模块 的状态进行实时监测与操作。同时提供 PnC monitor 、 Console 等调试工具可以快速帮助开发者实现对自动驾驶开发的过程调试。
Dreamview启动命令:
$ bash scripts/bootstrap_neo.sh bootstrap成功运行后:

2.2播放数据包
cyber_recorder 是 Apollo cyber RT 提供的记录/回放工具。它提供了记录文件、回放记录文件、拆分记录文件、检查记录文件信息等功能。播放数据包的指令如下所示:
$ cyber_recorder play - f demo _3.5.record -1cyber _ recorder : Apollo cyber RT 提供的记录/回放工具
play :播放数据包
- f :后跟文件的绝对地址
-l:循环播放
demo _3.5.record: Record 文件用于记录从 Cyber RT 中的 Channel 发送接收的消息。回 放 Record 文件可以帮助重现 Cyber RT 之前操作的行为。

2.3PNC Monitor
PNC Monitor 是 Dreamview 中内置的数据监视器,它能够将规划、控制、延迟等相关数据信息以图表的形式展示,为开发者提供友好的数据可视化体验。可以实时观测车辆的加速度、速度等信息,观察其是否与预期相吻合。
2.4Cyber Monitor
启动指令:
$ cyber_monitor //另开一个终端(Terminal)cyber_monitor 提供了 Apollo 实时通道信息列表的清晰视图,便于开发者进行数据。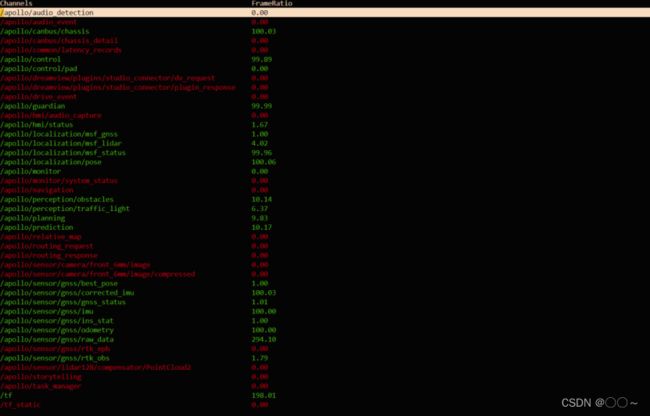
2.5日志
系统日志记录了当前运行模块的详细记录,当系统出现异常时候,可在 lopt/apollo/neo/data/log 下查找要调试的日志文件。
2.6本章小结
DreamView 是 Apollo 提供的提供的可视化交互界面,它提供如下的功能:
- 为用户提供人机交互接口以监测车辆硬件状态,对模块进行开关操作,启动自动驾驶车辆等;
- 可视化显示当前自动驾驶汽车模块的输出信息,例如,规划路径、车辆定位、车架信息等;
- 提供调试功能,例如 PnC monitor 工具的有效跟踪模块输出;
在数据调试方法上, Apollo 提供了:
- 为用户提供人机交互接口以监测车辆硬件状态,对模块进行开关操作,启动自动驾驶车辆等;
- 可视化的 DreamView 交互 HMI 内置 PNC monitor 等多种调试工具;
- Apollo Cyber RT 提供 Cyber monitior 等调试工具;
- 系统级别的 log 日志输出;
3.Apollo仿真工具的使用

图3.1 仿真流程图
Sim_control 通过模拟 Chassis 、 Localization 等信息输入,实现对 routing 、 planning 等算法模块的仿真调试,同时 Apolo 提供了 PNC Monitor 、 Cyber Monitor 等系统调试工具,可以实时的监控各模块运行数据,有效提升开发者对自动驾驶软件算法的学习与调试。
选择“Module Controler”,选择相应模块进行调试。

4.场景工具的使用

图4.1 场景工具使用流程图
4.1 个人场景编辑
首先点击“场景编辑”,并选择相应的地图。

完成基本信息的填写
放置主车,并填写主车的速度与加速度
用“新增轨迹点”,完成目标点的设置。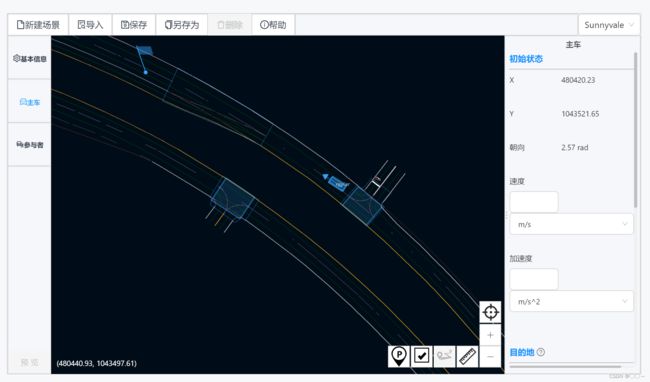
参与者的选定——可以选择机动车、自行车、行人、未知静止障碍物、未知移动障碍物等。选择机动车同需要设置目标点。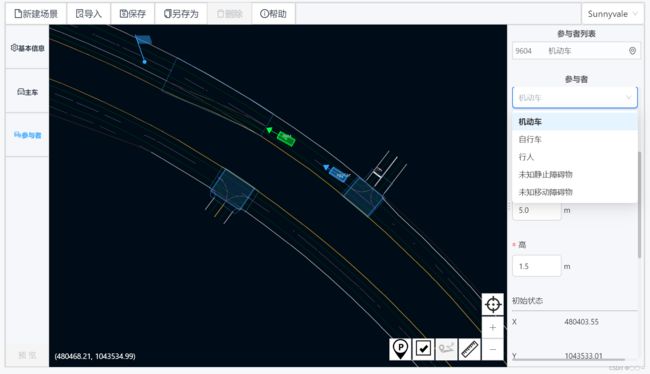
最后保存,按照官方教程添加入场景集即可 。
4.2 参数调整
本实验将介绍通过修改软件参数,实现对车辆巡航速度的调整。定速巡航速度的配置参数在代码apollo/modules/planning/conf 找到配置文件 planning.conf
cd /apolo/modules/planning/conf/
vim planning.conf 
运行 Sim control ,查看实验效果.
进入配置文件目录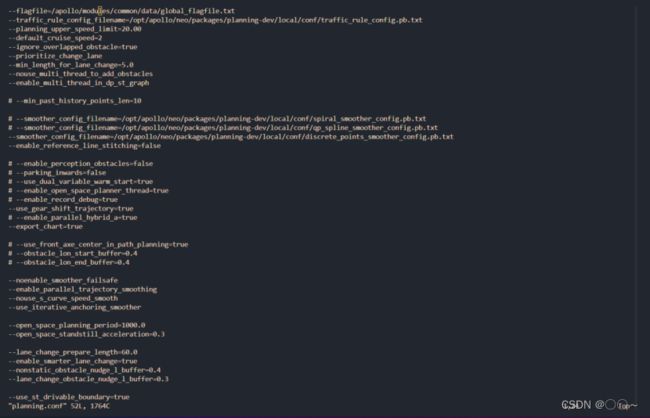
使用 VIM 编辑器修改配置
ps : Dreamview 上显示的车辆速度单位为 km / h , planning.conf 配置文件中的速度单位为m/s。
按“I”键进入“--INSERT--”模式——此时才能对配置文件进行修改。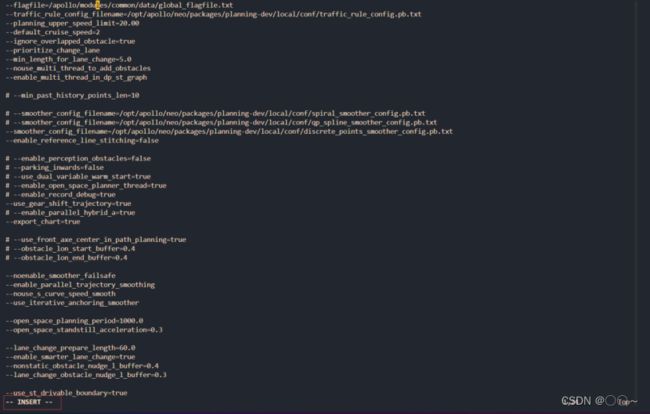
修改 planning _ upper _ speed _ limit =5, default _ cruise _ speed =2
按“Esc”结束更改;再按“:”,并在之后加上“wq”进行保存;按“Enter”退出![]()
通过cat planning.conf指令来观察自己是否更改成功。
4.3 本章小结
Apolo Studio 的仿真引擎拥有大量的场景数据,基于大规模云端计算容量,打造日行百万公里的虚拟运行能力,形成一个快速迭代的闭环,让开发者轻松实现“日行百万里”,提升开发效率。它提供如下的功能:
- 便捷的场景管理功能,满足开发者仿真需求;
- 云端场景一键同步到本地,无缝链接自动驾驶功能调试
5. 学习记录
Apolo星火计划学习记录
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。