混合A*算法研究
目的
看了一些介绍“混合A星”的博客,写的都太业余了。本文从专业的角度探讨一下无人车运动规划中著名的混合A星(Hybrid A Star)方法,首先我们最关心的两个问题是:
● 混合A星适用于什么场景?
存在障碍物的环境,低速、有运动约束的机器人或无人车。在无人驾驶上具体可以用于停车场的自动泊车的路径规划。
这里的关键词是“约束”,如果你看到有人把混合A星用在差速机器人或者全向机器人上,那你就可以得出判断:使用者不懂混合A星。因为,如果机器人没有运动约束,那么完全没有必要用混合A星。
● 混合A星的缺点是什么?
知己知彼才能用好,混合A星一个比较大的问题是,它输出的路径质量一般比较差,这里差的意思是指路径包含一些不必要的拐弯或者倒车动作,这就是为什么一般在混合A星之后再优化一下,或者把混合A星当成一个给优化算法提供初始路径的子模块,而不是单独使用。
还有,混合A星也是一种依赖分辨率的方法,受制于分辨率,它要么有可能找不到解,要么花的时间太多,实时性不好。
1 混合A星的思想
混合A星算法是2008年斯坦福的Dmitri Dolgov, Sebastian Thrun等人在论文《Practical Search Techniques in Path Planning for Autonomous Driving》中首次提出的,后来又补充了一些细节发表在顶级期刊International Journal of Robotics Reaserch上。狭义的混合A星只包含搜索的过程,广义的混合A星把后处理也加上了。所以混合A星可以看成是由几个模块组合起来的。路径规划的三大门派:图搜索法、随机采样法、势场法全部在这篇文章中现身了。
混合A星可以看成是探索树方法和A星算法的混血,这两种方法在机器人领域都是大名鼎鼎,所以结个婚生个孩子也很正常,毕竟组合创新是最容易的创新之一。就连Matlab居然都内置了混合A星算法:plannerHybridAStar,可见这个算法也出名了,但是Matlab使用了占据栅格地图进行碰撞检测。混合A星适合有运动约束的机器人,最典型的就是汽车。
混合A星算法的思想比较简单,为了让入门者更容易理解,我先介绍它的爸爸妈妈:探索树方法和A星算法。探索树方法也是一个比较通用的方法,有好多变种,最有名的就是RRT(快速探索随机树)方法,如下面的左图所示。
A星算法也是非常有名,它其实也是生长一颗树,从起点开始不断向外探索,直到找到目标点停止生长。这么描述听起来好像跟Dijkstra方法一样,只不过A星方法更“聪明”。Dijkstra方法比较笨,它只知道傻傻地一个个生长最外面的所有节点。A星就知道哪些节点离目标更近,它会优先生长更近的节点,所以A星比Dijkstra方法快。
1.1 启发信息
启发信息(heuristics)对于混合A星算法至关重要,也是作者着重讨论的。混合A星算法使用了两种启发信息的组合,这两种启发一种“考虑运动约束不考虑障碍物”,一种刚好相反“不考虑运动约束考虑障碍物”,如下图所示。这个“考虑约束不考虑障碍物”的启发就是Reeds-Shepp曲线的长度,“不考虑约束考虑障碍物”的启发就是传统A星算法搜索到目标的路径的长度。混合A星算法选择两者的最大值作为最终的启发信息。为什么要使用两种启发信息?作者是这样解释的,使用第一种(“考虑约束不考虑障碍物”)是为了防止机器人从错误的方向到达目标,作者说实际试验中使用这种启发比不使用的效率提高了一个数量级,看来是必不可少了。使用第二种(“考虑障碍物不考虑约束”)是为了防止在断头路或者U型障碍物里浪费时间。

启发信息唯一的作用是给搜索算法提供指引、让算法更“聪明”,从而优先探索有可能产生解的区域,不要在没必要的区域浪费时间。因为我们的探索过程计算量可能比较大,所以启发信息提供的指导越准确,最终算法的效率就越高。启发信息既然只是提供指导,那么它的计算量就不能太大,最好是很快就能算出来的,例如A星使用的到目标的欧式距离,混合A星使用的Reeds-Shepp曲线的长度和A星的结果不是非常快(跟欧式距离比),但是还是可以接受的。作者也发现了,Reeds-Shepp曲线这一启发信息既然不依赖障碍物,那就可以提前把所有离散节点的长度一次性都算出了,然后用的时候直接查询,用空间换时间的方法显然就快多了。对启发信息的一个要求是,不能高估,可以低估。这里采用的两个启发信息都是低估,所以是合理的,最终取最大值当然也是低估。
作者还表示,这么定义的启发信息跟混合A星算法其实没什么关系(不依赖混合A星的状态)。也就是说,你可以用在其它搜索算法上(随便用不要钱),当然你要是有更牛逼的启发信息也可以把它换成你自己的。所以,启发信息是个可以替换的模块,跟混合A星算法不是绑定的,你觉得好就用,有更好的也可以换,当然你要是彻底不用那混合A星算法就发挥不出它的威力了。
3 混合A星算法的缺点
需要设置的参数有:
机器人控制量采样值
空间离散的分辨率。空间离散的分辨率如何选择呢?机器人每次运动的距离如何设置呢,显然与空间分辨率有关,如果分辨率太小,计算量就太大;如果分辨率太大,机器人运动距离太小,那么每次生成的节点都在一个栅格里,探索树就没办法扩展。
启发函数如何选取?
论文中讨论了几种启发函数,一种是考虑约束但不考虑障碍物的RS曲线的长度,一种是不考虑约束但是考虑障碍物的普通A星算法搜索出来的路径长度。
3 混合A星算法的改进
1 双向探索,即不仅在起点向终点扩展,也从终点向起点扩展。这在终点障碍物密集时比较有效。
2 变分辨率,不使用均匀一致的分辨率,在障碍物附近使用较高的分辨率,原理障碍物使用低分辨率,减少不必要的计算。
3 轨迹片段仿真使用连续变化的控制量。
4 混合A星算法实现
混合A星算法实现采用的是Github上 karlkurzer 的版本,下载和编译过程如下。新建并运行脚本即可实现傻瓜式一键安装,非常简单。
#!/bin/bash
mkdir -p ~/HybridAStar/src
cd ~/HybridAStar/src
git clone https://github.com/karlkurzer/path_planner.git
cd ..
catkin_make
source devel/setup.bash
rospack profile
roslaunch hybrid_astar manual.launch
4.1 碰撞检测
碰撞检测是离散的方法,将机器人的外形(长方形)分成一个个小方格,每个方格依次判断是否在障碍物中,如果有一个在那就意味着发生了碰撞。
具体的碰撞检测包含以下几步:
首先,如何从机器人的外形得到它的离散方格?作者使用的是论文《A Fast Voxel Traversal Algorithm for Ray Tracing》中的方法,代码是https://github.com/francisengelmann/fast_voxel_traversal/blob/master/main.cpp。该方法比Bresenham方法更好。一个展示动画在这里:点击我(A Fast Voxel Traversal Algorithm (shadertoy.com))。
2 代码优化
源程序有几个严重的缺点,首先分辨率定义混乱。A* 搜索有自己的离散分辨率,而碰撞检测采用占据栅格法,栅格也有自己的分辨率,一般这两个是不一样的。而源程序定义为一样的,这显然不合理。其次,连接目标使用的是Dubins曲线,这对无人车来说显然是不合理的。修改后的运行效果如下图所示,其中黑色物体表示障碍物,红色箭头表示起始的无人车位姿,绿色的则表示目标位姿。可见,大多数情况能得到比较好的路径,但是有时得到的路径质量也很差,有时甚至失败(侧方位停车的时候)。例子中使用的地图分辨率是10cm,A* 搜索分辨率是1m,角度离散为144个(2.5°)。
原文件使用的全局坐标系名称是path,我们改成更常用的map。在path.h文件里修改,如下:
path.header.frame_id = "map";
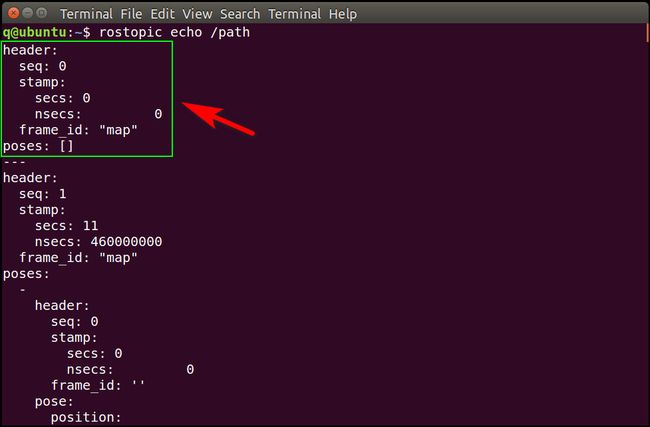
发布的路径话题名称是/path,路径在rviz中显示没有问题,但是如果打印出来就会发现消息头多了一个,如下图所示。原因是 path.cpp 文件中的Path::clear()函数里的path.poses.clear()语句导致,把它放到下面的Path::updatePath函数中即可。
3 前进后退
混合A星算法输出的是一条路径,该路径由一连串离散的坐标点组成。如果你想在路径基础上添加速度构成一条轨迹,可以这么做:前进时设置速度为正值,后退时设置速度为负值,在前进和后退相接的点设置速度为0。这样做需要判断什么时候是前进,什么时候是后退。判断方法是计算机器人航向角θ 与相邻路径点构成的向量θ的夹角Δ θ。涉及到角度要小心,需要保证角度的范围。为此定义正则函数modpipi,其功能是将角度转换为( − π , π )的范围内。计算相邻路径点向量与x xx轴的角度需要利用atan2函数,使用这个函数也要小心。注意,atan2(0,0)=0。原程序有一个小BUG,即可能存在两个坐标完全一样的点,原因是在做Dubins曲线拼接时没有考虑重叠。为此,先对路径预处理,剔除相邻路径点x y xyxy坐标完全相同的其中一个点。这也是
4 话题发布path.cpp
规划出来的路径通过path.cpp这个文件发布出来。这个文件中的命名雷同,看起来非常累,比如文件名叫path,类的名称叫Path,话题名也叫path,坐标系也叫path,这是一种混乱的命名方式。
这里我们最感兴趣的是发布路径的消息:
nav_msgs::Path path;
负责向里填充数据的是addSegment函数
void Path::addSegment(const Node3D& node)planner.h里定义了碰撞检测
CollisionDetection configurationSpace然后把加载的地图赋值给它,
configurationSpace.updateGrid(map);
————————————————
版权声明:本文为CSDN博主「robinvista」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/robinvista/article/details/106279968