动态避障路径规划算法matlab_基于采样的局部规划与避障算法
一、引言
目前为系统添加了局部路径规划模块,结合之前做的视觉激光雷达信息融合模块,系统需要进一步对避障部分进行处理。
局部路径规划总的来说是在全局路径规划模块下,结合避障信息重新生成局部路径的模块,上层的全局路径规划确定了A到B的一个全局路径,不过轨迹跟踪模块(比如 pure persuit)实际进行跟踪的不能是这个直接生成的全局路径,因为系统实际工作可能会有其他情况发生,轨迹跟踪模块实际跟踪的是结合障碍物信息的局部路径。
局部路径规划算法有好多种,例如人工势场法,动态窗口法等,
这里要介绍的是DARPA比赛中斯坦福大学Stanley自动驾驶系统所使用局部路径规划算法,是一种基于采样的局部路径规划算法,该算法在autoware的op_planner模块也有使用,本文主要是基于autoware的op_planner模块进行介绍。
整体来看op_planner的local_planner主要分为两部分:Rollouts Generator 和 Rollouts Evaluator,前者根据全局中心路径生成一系列平滑的候选局部路径,后者结合障碍物信息和其他因素计算各个Rollout的代价Cost,从而选出最终平滑的,无障碍的局部路径。
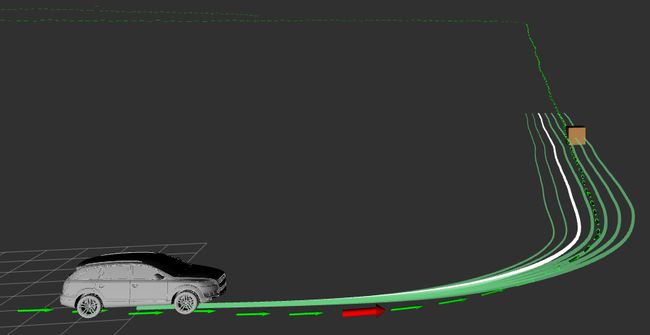
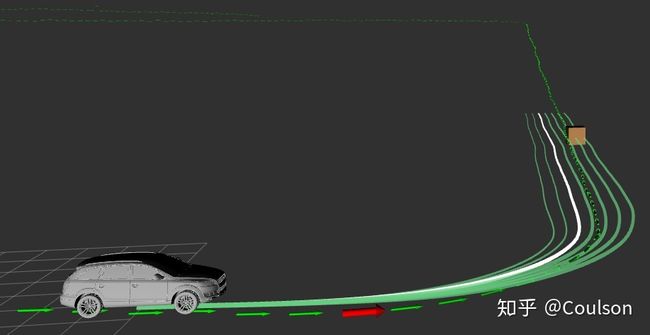
Rollouts 的含义就是根据中心全局路径生成的一些列候选局部路径。如下图所示:
中间的绿线是全局路径规划模块生成的全局路径,棕色线是生成的一系列候选局部路径。
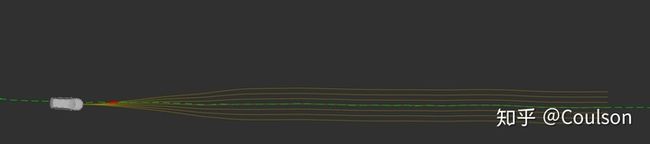
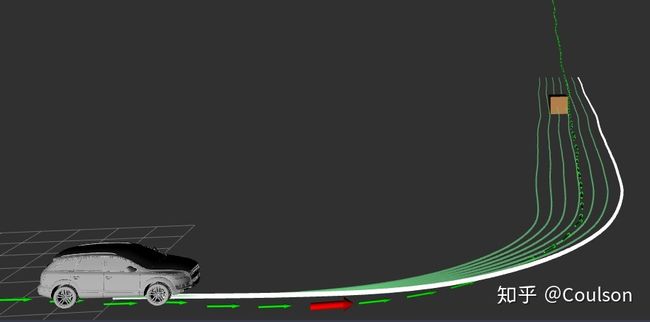
在有障碍物存在的情况下,经过计算每个rollout的代价Cost,选出最优的路径如下所示:

其中,白线就是评估后得到的最优的局部路径。
下面针对local_planner的两个主要部分的算法Rollouts Generator 和 Rollouts Evaluator进行简要分析,相关代码已经同步到我的github,位于planning/local_planner
https://github.com/sunmiaozju/smartcargithub.com参考论文: Open Source Integrated Planner for Autonomous Navigation in Highly Dynamic Environments
完整的论文地址: github-smartcar/planning/local_planner/docs/Open Source Integrated Planner for Autonomous Navigation in Highly Dynamic Environments.pdf
二、Rollouts Generator
模块的输入信息是车辆当前位置,全局规划路径,rollouts数量,规划距离等等
输出的是n条平滑的,起点位于车辆当前位置,终点位于最大规划距离的候选局部规划轨迹。
根据论文中的描述,rollout被划分为了三个部分:Cartip,Rollin, Rollout,如下图所示:
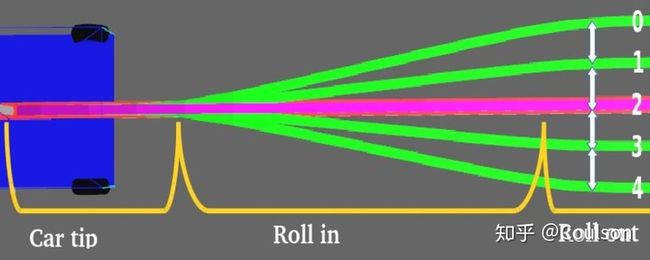
cartip部分从车辆中心点到水平采样的起点,这部分的长度决定了车辆切换不同轨迹的平滑程度。
rollin部分从水平采样的起点到平行采样的起点,这部分的长度和车辆速度密切相关,车辆速度越快,rollin部分应越长,使得轨迹更加平滑。
rollout部分从平行采样的起点到最大规划距离,这部分里每一条rollout都是平行的,相隔距离由rollout_density来确定。
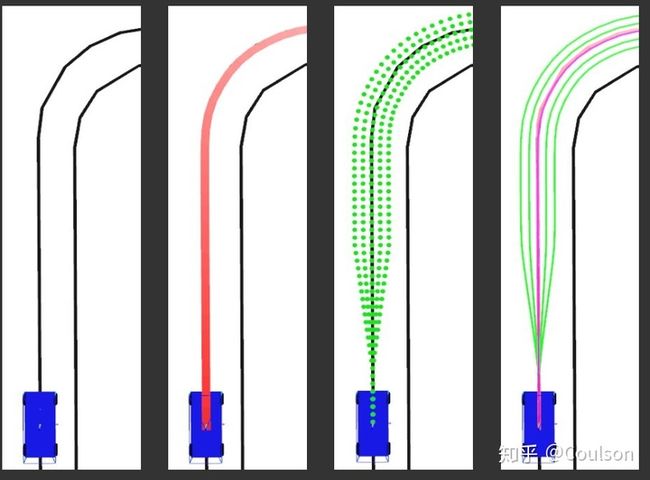
生成rollouts的算法主要包括三个部分:1、截取全局路径,长度为最大局部路径规划距离。2、针对截取的全局路径进行点采样。3、平滑得到的采样点,生成最终候选轨迹。具体如下图所示:
主循环函数主要的内容就是extractPartFromTrajectory()和generateRunoffTrajectory()。具体代码细节可以参考github.
/**
* @description: 主循环函数
* @param {type}
* @return:
*/
void RolloutGenerator::run()
{
ros::Rate loop_rate(100);
while (ros::ok())
{
ros::spinOnce();
if (currentPose_flag && globalPaths.size() > 0)
{
globalPathSections.clear();
for (size_t i = 0; i < globalPaths.size(); i++)
{
centralTrajectorySmoothed.clear();
// 截取全局规划路径
extractPartFromTrajectory(globalPaths[i], current_pose, 50,
PlanningParams.pathDensity, centralTrajectorySmoothed);
globalPathSections.push_back(centralTrajectorySmoothed);
}
std::vector sampled_points;
// 生成候选rollouts
generateRunoffTrajectory(globalPathSections,
current_pose,
speed,
PlanningParams.microPlanDistance,
PlanningParams.carTipMargin,
PlanningParams.rollInMargin,
PlanningParams.speedProfileFactor,
PlanningParams.pathDensity,
PlanningParams.rollOutDensity,
PlanningParams.rollOutNumber,
PlanningParams.smoothingDataWeight,
PlanningParams.smoothingSmoothWeight,
PlanningParams.smoothingToleranceError,
rollOuts,
sampled_points);
}
三、Rollouts Evaluator
这部分的输入是之前生成的Rollouts以及感知模块得到的障碍物信息,输出的是最优的局部规划路径。
这里使用三个代价函数来评估不同的局部路径:priority cost, collision cost 和 transition cost.
priority cost 代表中间的局部轨迹优先级是最高的,在没有障碍物的情况下,优先选择中间的局部轨迹,如下所示:
// cal priority cost
for (int i = 0; i < rollouts.size(); i++)
{
tc.index = i;
tc.relative_index = i - params.rollOutNumber / 2;
tc.distance_from_center = params.rollOutDensity * tc.relative_index;
tc.priority_cost = fabs(tc.distance_from_center);
}
transition cost 限制了车辆不会跳跃多个局部路径,确保了车辆前进路径的平滑性。根据车辆当前所处的局部路径位置,转换到临近车道代价较小,转换到较远车道代价较大。如下所示:
// cal transition cost
for (int ki = 0; ki < trajectoryCosts.size(); ki++)
trajectoryCosts[ki].transition_cost = fabs(params.rollOutDensity * (currIndex - ki));
collision cost 主要分为lateral_cost 和 longitudinal_cost,前者代表局部轨迹距离障碍物的水平距离,后者代表局部轨迹距离最近障碍物的垂直距离
collision cost计算的相关代码细节位于函数 calLateralAndLongitudinalCostsStatic()
for (int i = 0; i < rollOuts.size(); i++)
{
for (int k = 0; k < contourPoints.size(); k++)
{
UtilityNS::RelativeInfo contour_rela_info;
UtilityNS::getRelativeInfo(centerPath, contourPoints[k], contour_rela_info);
if (contour_rela_info.iFront == 0 && contour_rela_info.iBack == 0 && contour_rela_info.direct_distance > 3)
continue;
// 计算当前障碍物点到车辆位置的沿着中心轨迹的距离
double longitudinalDist = getTwoPointsDistanceAlongTrajectory(centerPath, car_rela_info, contour_rela_info);
if (contour_rela_info.iFront == 0 && longitudinalDist > 0)
longitudinalDist = -longitudinalDist;
double distance_from_center = trajectoryCosts[i].distance_from_center;
lateralDist = fabs(contour_rela_info.perp_distance - distance_from_center) * 2;
if (lateralDist < 2 && longitudinalDist < params.minFollowingDistance && longitudinalDist >= -critical_long_back_distance)
trajectoryCosts[i].bBlocked = true;
if (lateralDist != 0)
trajectoryCosts[i].lateral_cost += 1.0 / lateralDist;
if (longitudinalDist != 0)
trajectoryCosts[i].longitudinal_cost += 1.0 / longitudinalDist;
if (longitudinalDist >= -critical_long_back_distance && longitudinalDist < trajectoryCosts[i].closest_obj_distance)
trajectoryCosts[i].closest_obj_distance = longitudinalDist;
}
}
四、实际效果
运行节点:
roslaunch local_planner rollout_generator.launch
roslaunch local_planner local_trajectory_generator.launch
roslaunch waypoint_follower pure_persuit.launch启动rviz,订阅相关话题可以看到如下效果:
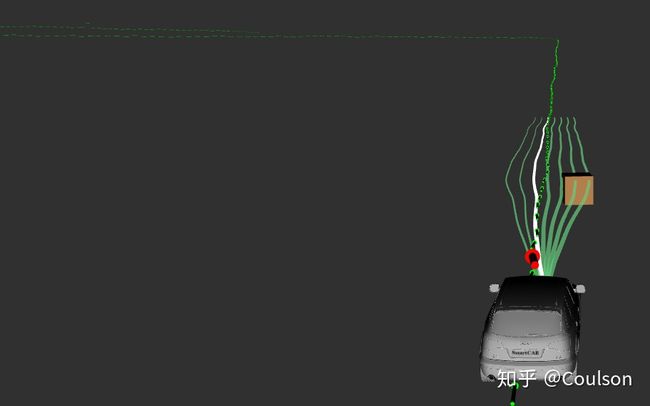
其中,白色线代表最优的局部路径规划轨迹
五、总结
本文简要介绍了autoware中的op_planner的局部路径规划算法,对关键的算法步骤进行简要说明,这部分模块可以实现基本的避障功能,相比于其他的局部路径规划算法,本文介绍的基于采样的局部路径规划实现简单,实时性较高,可以在实际部署运行。