智能优化算法:基于Powell优化的鸽群优化算法
智能优化算法:基于Powell优化的鸽群优化算法
- 前言
- 一、鸽群优化算法(Pigeon-inspired Optimization)原理
- 二、Powell算法
-
- 1. 原理
- 2. 算法流程
- 三、组合策略
- 四、仿真实验
- 五、总结
- 六、附件
前言
哈喽,大家好!我是一枚小博士,今天给大家带来的是鸽群优化算法(pigeon-inspired optimization, PIO)的改进策略——组合优化。
一、鸽群优化算法(Pigeon-inspired Optimization)原理
基本的PIO算法原理,请大家移步上一篇文章智能优化算法:基于量子的鸽群优化算法
二、Powell算法
1. 原理
鲍威尔法又称方向加速法,它由Powell于1964年提出,是利用共轭方向可以加快收敛速度的性质形成的一种搜索方法。该方法不需要对目标函数进行求导,当目标函数的导数不连续的时候也能应用,因此,鲍威尔算法是一种十分有效的直接搜索法。
Powell法可用于求解一般无约束优化问题,对于维数n<20的目标函数求优化问题,此法可获得较满意的结果。
不同于其他的直接法,Powell法有一套完整的理论体系,故其计算效率高于其他直接法。该方法使用一维搜索,而不是跳跃的探测步。同时,Powell法的搜索方向不一定为下降方向。
2. 算法流程
Step1: 给定初始点 x ( 0 ) x^{(0)} x(0),对算法的搜索精度ε赋值。给定D个线性无关的初始搜索方向 d ( i ) ( i = 0 , 1 , ⋯ , D − 1 ) d^{(i)} (i=0,1,⋯,D-1) d(i)(i=0,1,⋯,D−1),一般情况下选择D个坐标轴方向为搜索方向,D的取值与目标函数的维数有关。
Step2:从初始点 x ( 0 ) x^{(0)} x(0)出发,依次沿着 d ( 0 ) , d ( 1 ) , ⋯ , d ( D − 1 ) d^{(0)},d^{(1)},⋯,d^{(D-1)} d(0),d(1),⋯,d(D−1)进行一维搜索,根据公式(1)(2)得到 x ( 1 ) , x ( 2 ) , ⋯ , x ( D ) x^{(1)},x^{(2) },⋯,x^{(D)} x(1),x(2),⋯,x(D),令k=0。
f ( x ( i ) + α i d ( i ) ) = min α ∈ S f ( x ( i ) + α d ( i ) ) f\left( {{x^{\left( i \right)}} + {\alpha _i}{d^{\left( i \right)}}} \right) = \mathop {\min }\limits_{\alpha \in S} f\left( {{x^{\left( i \right)}} + \alpha {d^{\left( i \right)}}} \right) f(x(i)+αid(i))=α∈Sminf(x(i)+αd(i))
X ( i + 1 ) = x ( i ) + α i d ( i ) , i = 0 , 1 , ⋯ , D {X^{\left( {i + 1} \right)}} = {x^{\left( i \right)}} + {\alpha _i}{d^{\left( i \right)}},i = 0,1, \cdots ,D X(i+1)=x(i)+αid(i),i=0,1,⋯,D
其中, α i \alpha_i αi与α均为搜索步长, α i \alpha_i αi为目标函数一维最优化问题的解。
Step3:令 d ( D ) = x ( D ) − x ( 0 ) d^{(D)}=x^{(D)}-x^{(0)} d(D)=x(D)−x(0)。若 ‖ d ( D ) ‖ < ε ‖d^{(D)} ‖<ε ‖d(D)‖<ε,则得到解 x ( D ) x^{(D)} x(D),计算结束;否则,从 x ( D ) x^{(D)} x(D)出发,沿着 d ( D ) d^{(D)} d(D)进行精确的一维搜索,得到 x ( D + 1 ) x^{(D+1)} x(D+1)。
Step4:根据公式(3)计算一维搜索最快下降量 t l t_l tl为:
f ( x ( t l ) ) − f ( x ( t l − 1 ) ) = max o ≤ i ≤ D { f ( x ( i ) ) − f ( x ( i + 1 ) ) } f\left( {{x^{({t_l})}}} \right) - f\left( {{x^{\left( {{t_l} - 1} \right)}}} \right) = \mathop {\max }\limits_{o \le i \le D} \left\{ {f\left( {{x^{\left( i \right)}}} \right) - f\left( {{x^{\left( {i + 1} \right)}}} \right)} \right\} f(x(tl))−f(x(tl−1))=o≤i≤Dmax{f(x(i))−f(x(i+1))}
Step5:若不等式(4)成立,则表明D个一维搜索方向仍然为线性无关。令 x ( 0 ) = x ( D + 1 ) , k = k + 1 x^{(0)}=x^{(D+1)},k = k+1 x(0)=x(D+1),k=k+1,跳转至step2。
f ( x ( 0 ) ) − 2 f ( x ( D ) ) + f ( 2 x ( D ) − x ( 0 ) ) ≥ 2 ( f ( x ( t l ) ) − f ( x ( t l + 1 ) ) ) f\left( {{x^{\left( 0 \right)}}} \right) - 2f\left( {{x^{\left( D \right)}}} \right) + f\left( {2{x^{\left( D \right)}} - {x^{\left( 0 \right)}}} \right) \ge 2\left( {f\left( {{x^{\left( {{t_l}} \right)}}} \right) - f\left( {{x^{\left( {{t_l} + 1} \right)}}} \right)} \right) f(x(0))−2f(x(D))+f(2x(D)−x(0))≥2(f(x(tl))−f(x(tl+1)))
Step6:如果不等式(4)不成立,则表明一维搜索方向线性相关,则令 d ( t i + i ) = d ( t l + i + 1 ) , i = 0 , 1 , ⋯ , D − t l − 1 d^{(t_i+i) }=d^{(t_l+i+1) },i=0,1,⋯,D-t_l-1 d(ti+i)=d(tl+i+1),i=0,1,⋯,D−tl−1,确保产生一组新的线性无关搜索方向.。令 x ( 0 ) = x ( D + 1 ) , k = k + 1 x^{(0)}=x^{(D+1)},k=k+1 x(0)=x(D+1),k=k+1,转至Step2。
三、组合策略
Powell算法计算简单、收敛速度快、不需要计算函数导数,具有较强的局部搜索能力。但Powell算法极度依赖初始点配置,初始值选择的好坏直接影响了算法是否能收敛到全局极小值,甚至导致算法配准失败。因此将鸽群算法优化后的位置信息作为Powell算法初始值,避免Powell搜索失败。
可以自由设置组合中迭代策略,即每隔n次迭代后,使用Powell算法进行再次优化。
四、仿真实验
采用CEC测试函数Ackley对改进前后算法进行测试,目标维度为20维。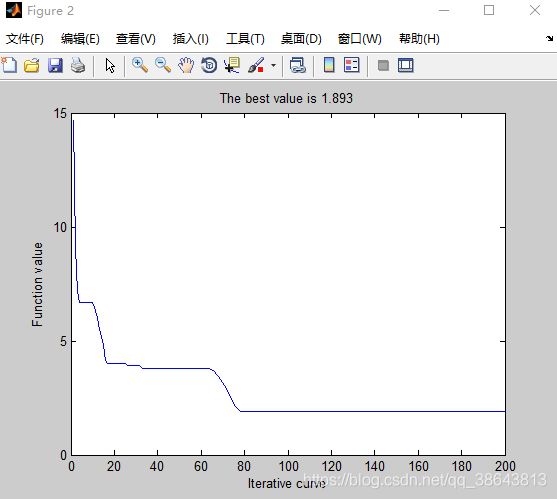
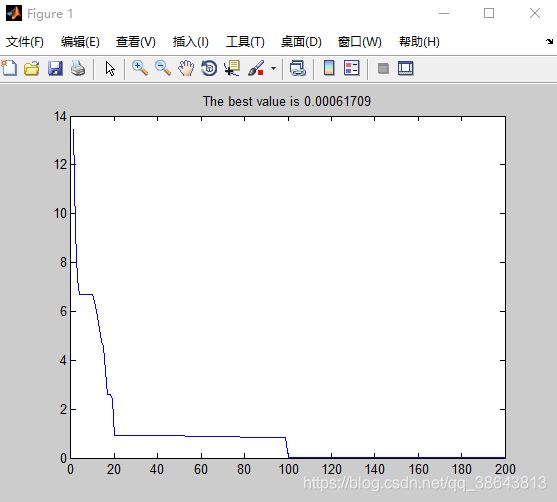
五、总结
通过图1与图2 ,我们可以看出改进前的最优解为1.893,改进后的最优解为 6.1709e-4,根据Powell优化的间隔次数不同,最优优化的效果也不尽相同。但,尽可能不要间隔太小,否则会增加算法的时间复杂度。
六、附件
Powell-PIO算法的Matlab代码链接如下:https://mianbaoduo.com/o/bread/aZ6Xmpo=
注:好多朋友问我要基本PIO算法代码,我放在下载专栏了,地址为:https://download.csdn.net/download/qq_38643813/13125329大家如果是CSDN会员的话可以直接去下载,如果不是的话也不要破费了,在评论区留下邮箱,我发给你!