表示学习(Representation Learning)(三)——流形学习
关于什么是流形和流形学习(Manifold Learning),作为一种针对非线性数据的降维方法的算法的研究,有很多优秀的文章博客可以供大家学习,这里贴几篇文章供大家参考看看Manifold Learning | SpringerLink
https://arxiv.org/abs/2011.01307
[Goodfellow et al., 2016] Goodfellow I., Bengio Y., and Courville A. (2016): Deep Learning, MIT Press. (Section 5.11.3)
这里直接介绍三个算法思想:
1)多维缩放模型(Multi-dimensional Scaling (MDS))
2)等距离特征映射模型(Isometric Feature Mapping (ISOMAP))
3)局部线性嵌入模型(Locally Linear Embedding (LLE))
首先我们明确这些算法的目的:
这些算法都是为了实现将处于高纬度的数据集,通过一个函数变换,将原空间的数据映射到低维度空间上,且该映射要做到尽可能保留数据在原空间上点与点的距离关系。
多维缩放模型(Multi-dimensional Scaling (MDS))
给定一个高纬度数据集 (![]() N个样本,d个特征)的内积距离矩阵
N个样本,d个特征)的内积距离矩阵![]() ,其中
,其中![]() (可以看出该算法模型的好处,不需要知道原数据的特征信息,只需要获得距离矩阵即可),接着我们假设一个要求的目标空间p维度(p
(可以看出该算法模型的好处,不需要知道原数据的特征信息,只需要获得距离矩阵即可),接着我们假设一个要求的目标空间p维度(p
![]()
问题则转换成了:找到这样一组点![]() 使得
使得![]() 其中函数映射f是一个单调的含参函数。同时为了保证结果的唯一性,应使得
其中函数映射f是一个单调的含参函数。同时为了保证结果的唯一性,应使得

(如果没有该限制,如果有这样两个解,![]() ,
,
就有![]() ,
,
则![]() 同样是一组解)
同样是一组解)
如此问题就转换成了损失函数L的最小化

一个求解方法是利用欧拉向量空间的性质:对于一个数据中心化的矩阵X,它的内积矩阵![]() 可由它的距离矩阵表示:
可由它的距离矩阵表示:
![]()
![]()
其中 是单位矩阵
是单位矩阵
同样的在目标空间,
![]()
则损失函数

结合上一篇主成分分析中的求解方法,我们可以知道可以对这个实对称矩阵G进行谱分解
![]()
其中 是
是![]() 对应的特征向量
对应的特征向量
则原数据在目标空间的表示
![]()
![]() 是前p个特征值组成的对角矩阵,
是前p个特征值组成的对角矩阵,![]() 是对应特征向量组成的矩阵
是对应特征向量组成的矩阵
from sklearn.metrics.pairwise import euclidean_distances
def cmds(X, n_dim, input_type='raw'):
"""
Parameters
----------
X: 可以是(d, n) 也可以是(n,n)
n_dim: 目标空间维度
"""
if input_type == 'distance':
D = X
elif input_type == 'raw':
Xt = X.T
D = euclidean_distances(Xt,Xt)
N = D.shape[0]
D2 = D**2
H = np.eye(N) - 1/N
T = -0.5*np.dot(np.dot(H,D2),H)
evals,evecs = np.linalg.eig(T)
Y = np.dot(evecs[:,:n_dim],np.diag(np.sqrt(evals[:n_dim])))
return Y.T, evals[0:n_dim], evecs[0:n_dim]
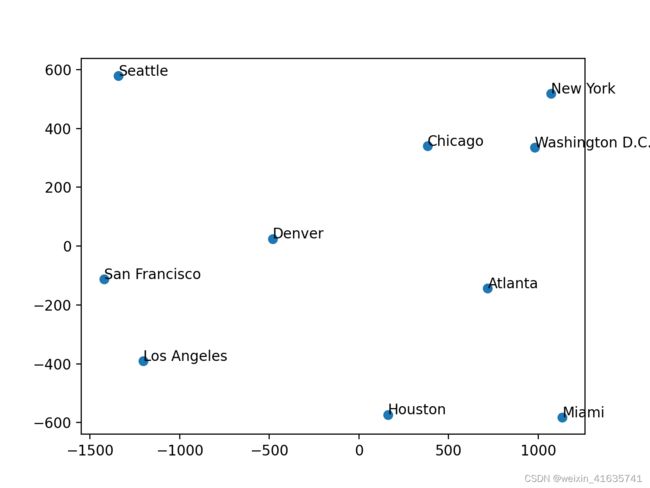
def ten_city():
city_name = ['Atlanta', 'Chicago', 'Denver', 'Houston', 'Los Angeles', 'Miami', 'New York', 'San Francisco', 'Seattle', 'Washington D.C.']
num_city = len(city_name)
data = np.zeros([num_city, num_city])
data[1,0] = 587
data[2,0] = 1212; data[2,1] = 920
data[3,0] = 701; data[3,1] = 940; data[3,2] = 879
data[4,0] = 1936; data[4,1] = 1745; data[4,2] = 831; data[4,3] = 1374
data[5,0] = 604; data[5,1] = 1188; data[5,2] = 1726; data[5,3] = 968; data[5,4] = 2339
data[6,0] = 748; data[6,1] = 713; data[6,2] = 1631; data[6,3] = 1420; data[6,4] = 2451; data[6,5] = 1092
data[7,0] = 2139; data[7,1] = 1858; data[7,2] = 949; data[7,3] = 1645; data[7,4] = 347; data[7,5] = 2594; data[7,6] = 2571
data[8,0] = 2182; data[8,1] = 1737; data[8,2] = 1021; data[8,3] = 1891; data[8,4] = 959; data[8,5] = 2734; data[8,6] = 2408; data[8,7] = 678
data[9,0] = 543; data[9,1] = 597; data[9,2] = 1494; data[9,3] = 1220; data[9,4] = 2300; data[9,5] = 923; data[9,6] = 205; data[9,7] = 2442; data[9,8] = 2329
return data, city_name
flying_dist, city = ten_city()
flying_dist = flying_dist + flying_dist.T
n_dim = 2
Y_city, evals_city, evecs_city = cmds(flying_dist, n_dim, input_type='distance')
x=[]
y=[]
Y_city = Y_city.T
for i in range(len(Y_city)):
x.append(Y_city[i][0])
y.append(Y_city[i][1])
plt.figure("2-D")
plt.scatter(x, y)
for i in range(len(x)):
plt.annotate(city[i], xy = (x[i], y[i]), xytext = (x[i]+0.1, y[i]+0.1)) # 这里xy是需要标记的坐标,xytext是对应的标签坐标
plt.show()