一文带你了解python opencv中霍夫变换(Hough transform)的常用操作
文章目录
- 前言
-
- 霍夫直线变换
-
- cv2.HoughLines
- cv2.HoughLinesP
- skimage.transform.hough_line
- 霍夫直线检测的一个具体应用————地图上的道路检测
-
-
- 导入资源并显示图像
- 执行边缘检测
- 使用Hough变换查找直线
- 在霍夫空间中展示
-
- 霍夫圆变换
-
- cv2.HoughCircles
- 霍夫圆变换的一个具体应用——硬币检测
-
-
- import related libraries
- load image
- HoughCircles function
- load image
- Houghcircle detection
-
前言
霍夫变换是一种特征检测(feature extraction),被广泛应用在图像分析(image analysis)、计算机视觉(computer vision)以及数位影像处理(digital image processing)。霍夫变换是用来辨别找出物件中的特征,例如:线条。他的算法流程大致如下,给定一个物件、要辨别的形状的种类,算法会在参数空间(parameter space)中执行投票来决定物体的形状,而这是由累加空间(accumulator space)里的局部最大值(local maximum)来决定。
霍夫直线变换
cv2.HoughLines
lines = cv2.HoughLines(edges,1,np.pi/180,200)
返回一组(rho, theta)列表。rho以像素为单位测量,并且theta以弧度为单位。
第一个参数,输入图像应该是一个二值图像,所以在应用霍夫变换之前应用阈值或使用精明的边缘检测(Canny)。
第二个和第三个参数分别是rho 和theta的精度。
第四个参数是阈值,这意味着它应该被视为一条线的最低投票数。投票数取决于线上的点数。所以它可能代表了应该检测的最小线长。
代码示例
import cv2
import numpy as np
img = cv2.imread('../data/sudoku.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,150,apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,200)
for line in lines:
rho,theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),2)
cv2.imwrite('houghlines3.jpg',img)
cv2.HoughLinesP
lines = cv2.HoughLinesP(edges, rho, theta, threshold, min_line_length, max_line_gap)
HoughLinesP(image, rho, theta, threshold, lines=…, minLineLength=…, maxLineGap=…)
rho参数表示参数极径 r 以像素值为单位的分辨率,这里一般使用 1 像素。
theta参数表示参数极角 \theta 以弧度为单位的分辨率,这里使用 1度。
threshold参数表示检测一条直线所需最少的曲线交点。
lines参数表示储存着检测到的直线的参数对 (x_{start}, y_{start}, x_{end}, y_{end}) 的容器,也就是线段两个端点的坐标。
minLineLength参数表示能组成一条直线的最少点的数量,点数量不足的直线将被抛弃。
maxLineGap参数表示能被认为在一条直线上的亮点的最大距离。
代码示例
rho = 1
theta = np.pi/180
threshold = 30
min_line_length = 50
max_line_gap = 20
line_image = np.copy(image) #creating an image copy to draw lines on
# Run Hough on the edge-detected image
lines = cv2.HoughLinesP(edges, rho, theta, threshold, np.array([]), min_line_length, max_line_gap)
# Iterate over the output "lines" and draw lines on the image copy
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),5)
plt.figure(dpi=200, figsize=(3, 3))
plt.tick_params(labelsize=5)
plt.imshow(line_image)
skimage.transform.hough_line
h, angles, d = st.hough_line(img_edges)
h: 霍夫变换累积器
angles: 点与x轴的夹角集合,一般为0-179度
distance: 点到原点的距离
代码示例
import skimage.transform as st
h, angles, d = st.hough_line(img_edges)
print("hough space type:",type(h)," data type:",h.dtype," shape: ",h.shape," dimension: ",h.ndim," max:",np.max(h)," min:",np.min(h))
print("angles space type:",type(angles)," data type:",angles.dtype," shape: ",angles.shape," dimension: ",angles.ndim)
print("dist space type:",type(d)," data type:",d.dtype," shape: ",d.shape," dimension: ",d.ndim," max:",np.max(d)," min:",np.min(d))
import math
hough_d = math.sqrt(wide**2 + height**2)
print("hough_d:",hough_d)
angle_step = 0.5 * np.rad2deg(np.diff(angles).mean())
d_step = 0.5 * np.diff(d).mean()
# bounds = (np.rad2deg(angles[0]) - angle_step,
# np.rad2deg(angles[-1]) + angle_step,
# d[-1] + d_step, d[0] - d_step)
bounds = (np.rad2deg(angles[0]) + angle_step,
np.rad2deg(angles[-1]) - angle_step,
d[-1] - d_step, d[0] + d_step)
print("max angle",np.rad2deg(np.max(angles)),"min angle:",np.rad2deg(np.min(angles)))
print("max d",np.max(d),d[0],"min d",np.min(d),d[-1])
plt.imshow(np.log(1+h),extent=bounds,cmap='gray')
# extent参数 x轴和y轴的极值,取值为一个长度为4的元组或列表,其中,前两个数值对应x轴的最小值和最大值,后两个参数对应y轴的最小值和最大值
霍夫直线检测的一个具体应用————地图上的道路检测
导入资源并显示图像
import numpy as np
import matplotlib.pyplot as plt
import cv2
%matplotlib inline
# Read in the image
image = cv2.imread('map.jpg')
# Change color to RGB (from BGR)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image)

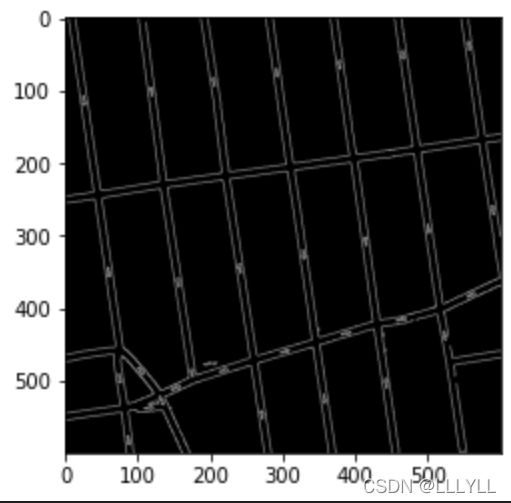
执行边缘检测
# Convert image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Define our parameters for Canny
low_threshold = 100
high_threshold = 200
edges = cv2.Canny(gray, low_threshold, high_threshold)
plt.imshow(edges, cmap='gray')
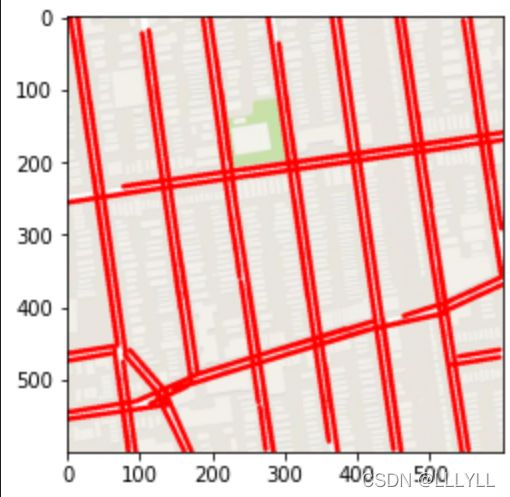
使用Hough变换查找直线
# Define the Hough transform parameters
# Make a blank the same size as our image to draw on
rho = 1
theta = np.pi/180
threshold = 30
min_line_length = 50
max_line_gap = 20
line_image = np.copy(image) #creating an image copy to draw lines on
# Run Hough on the edge-detected image
lines = cv2.HoughLinesP(edges, rho, theta, threshold, np.array([]), min_line_length, max_line_gap)
# Iterate over the output "lines" and draw lines on the image copy
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),5)
plt.imshow(line_image)
lines
Output exceeds the size limit. Open the full output data in a text editor
array([[[ 77, 234, 599, 160]],
[[400, 183, 459, 599]],
[[312, 185, 363, 542]],
[[ 9, 30, 69, 453]],
[[ 76, 244, 599, 170]],
[[276, 0, 331, 388]],
[[492, 274, 543, 599]],
[[110, 78, 153, 384]],
[[112, 19, 136, 196]],
[[391, 187, 449, 596]],
[[501, 269, 552, 597]],
[[146, 513, 414, 431]],
[[196, 0, 211, 102]],
...
[[482, 132, 492, 207]],
[[486, 229, 501, 329]],
[[147, 337, 156, 404]]], dtype=int32)
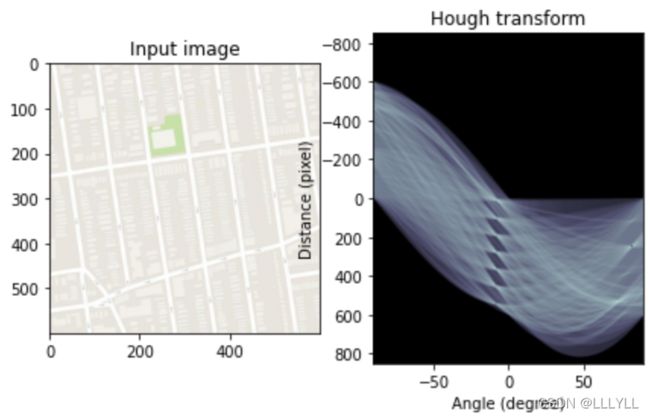
在霍夫空间中展示
import numpy as np
import matplotlib.pyplot as plt
from skimage.transform import hough_line
from skimage.draw import line
out, angles, d = hough_line(edges)
plt.figure(figsize=(20, 10))
fix, axes = plt.subplots(1, 2, figsize=(7, 4))
axes[0].imshow(image, cmap=plt.cm.gray)
axes[0].set_title('Input image')
angle_step = 0.5 * np.rad2deg(np.diff(angles).mean())
d_step = 0.5 * np.diff(d).mean()
bounds = (np.rad2deg(angles[0]) - angle_step,
np.rad2deg(angles[-1]) + angle_step,
d[-1] + d_step, d[0] - d_step)
print(np.max(angles),angles[0],np.min(angles),angles[-1])
print(np.max(d),d[0],np.min(d),d[-1])
#axes[1].imshow(out, cmap=plt.cm.bone, extent=bounds)
hough_img = np.log(1+out)
hough_img = cv2.resize(hough_img, dsize=(1699, 1800), fx=5, fy=1)
axes[1].imshow(hough_img, cmap=plt.cm.bone, extent=bounds, aspect='auto')
axes[1].set_title('Hough transform')
axes[1].set_xlabel('Angle (degree)')
axes[1].set_ylabel('Distance (pixel)')
plt.show()
1.5533430342749535 -1.5707963267948966 -1.5707963267948966 1.5533430342749535
849.0 -849.0 -849.0 849.0
霍夫圆变换
cv2.HoughCircles
circles = cv2.HoughCircles(image, method, dp, minDist, circles=None, param1=None, param2=None, minRadius=None, maxRadius=None)
其中:
image:8位,单通道图像。如果使用彩色图像,需要先转换为灰度图像。
method:定义检测图像中圆的方法。目前唯一实现的方法是cv2.HOUGH_GRADIENT。
dp:累加器分辨率与图像分辨率的反比。dp获取越大,累加器数组越小。
minDist:检测到的圆的中心,(x,y)坐标之间的最小距离。如果minDist太小,则可能导致检测到多个相邻的圆。如果minDist太大,则可能导致很多圆检测不到。
param1:用于处理边缘检测的梯度值方法。
param2:cv2.HOUGH_GRADIENT方法的累加器阈值。阈值越小,检测到的圈子越多。
minRadius:半径的最小大小(以像素为单位)。
maxRadius:半径的最大大小(以像素为单位)。
代码示例
circles_im=np.copy(img_copy)
circles=cv2.HoughCircles(gray_blur,cv2.HOUGH_GRADIENT,1,
minDist=80,
param1=70,
param2=20,
minRadius=100,
maxRadius=150)
circles=np.around(circles).astype('int')
# print(circles)
for i in circles[0]:
# print(i)
cv2.circle(circles_im,(i[0],i[1]),i[2],(255,0,0),5)
cv2.circle(circles_im,(i[0],i[1]),2,(0,255,0),10)
plt.imshow(circles_im)
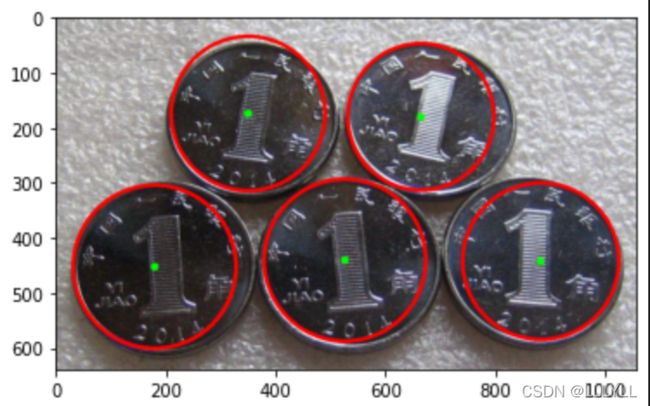
霍夫圆变换的一个具体应用——硬币检测
import related libraries
import cv2
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
load image
img = cv2.imread('coins.png')
img_copy=np.copy(img)
img_copy=cv2.cvtColor(img_copy,cv2.COLOR_BGR2RGB)
img_gray=cv2.cvtColor(img_copy,cv2.COLOR_RGB2GRAY)
gray_blur=cv2.GaussianBlur(img_gray,(21,21),cv2.BORDER_DEFAULT)
plt.imshow(img_copy,cmap='gray')
print(gray_blur.shape)
(639, 1056)

HoughCircles function
The HoughCircles function will receive the following variables as its parameters:
- An image, detection method (Hough gradient), resolution factor between detection and image (1),
- minDist-the minimum distance between circle and circle
- param1-the larger value to perform Canny edge detection
- param2-threshold for circle detection, smaller value -> more circles will be detected
- min / max Radius-the minimum and maximum radius of the detected circle
circles_im=np.copy(img_copy)
# TODO
circles=cv2.HoughCircles(gray_blur,cv2.HOUGH_GRADIENT,1,
minDist=80,
param1=70,
param2=20,
minRadius=100,
maxRadius=150)
circles=np.around(circles).astype('int')
# print(circles)
for i in circles[0]:
# print(i)
cv2.circle(circles_im,(i[0],i[1]),i[2],(255,0,0),5)
cv2.circle(circles_im,(i[0],i[1]),2,(0,255,0),10)
plt.imshow(circles_im)
load image
img = cv2.imread('twoCoins.png')
img_copy=np.copy(img)
img_copy=cv2.cvtColor(img_copy,cv2.COLOR_BGR2RGB)
img_gray=cv2.cvtColor(img_copy,cv2.COLOR_RGB2GRAY)
gray_blur=cv2.GaussianBlur(img_gray,(21,21),cv2.BORDER_DEFAULT)
plt.imshow(img_copy,cmap='gray')
print(gray_blur.shape)
(552, 931)

Houghcircle detection
circles_im=np.copy(img_copy)
# TODO
circles=cv2.HoughCircles(gray_blur,cv2.HOUGH_GRADIENT,1,
minDist=90,
param1=50,
param2=20,
minRadius=200,
maxRadius=220)
circles=np.around(circles).astype('int')
print(circles[0])
for i in circles[0,:]:
cv2.circle(circles_im,(i[0],i[1]),i[2],(255,0,0),5)
cv2.circle(circles_im,(i[0],i[1]),2,(0,255,0),20)
plt.imshow(circles_im)
[[236 292 200]
[700 292 200]]
