ROS入门——胡春旭老师《机器人开发实践》在ROS-Melodic下的编译
入门ROS系统,网上接触到的资料大部分都跟古月有关,故买来胡春旭老师(古月)的书籍《机器人开发实践》拜读。书中对仿真以及真实机器人同步做介绍,能一步一步跟着操作下来,非常适合入门。但由于书中提供的仓库源码是基于Kinetic版本的,而我的现有系统是Melodic版本,所以在编译源码中遇到很多问题,幸运的是踩在前辈们的肩膀上,问题都一一解决,现回忆记录如下,供后来者参考。
1.创建工作空间catkin_guyue1
mkdir -p ~/catkin_guyue1/src
cd ~/catkin_guyue1/src
catkin_init_workspace
cd ~/catkin_guyue1
catkin_make
- 源码下载
cd ~/catkin_guyue1/src
git clone https://github.com/huchunxu/ros_exploring.git
注意:需要将其中的ros2文件夹移出到其他目录(工作空间以外 ,或者删除),否则编译失败。
- 源码编译
cd ~/catkin_guyue1
catkin_make
错误1:关于ECTO的报错
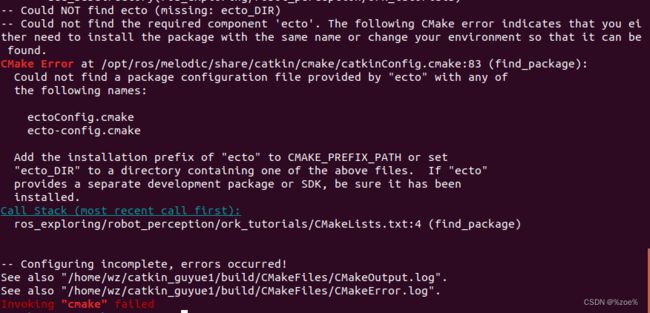
解决方法:
(1)下载ecto源码
cd ~/catkin_guyue1/src
git clone http://github.com/plasmodic/ecto.git
catkin_make -DCATKIN_WHITELIST_PACKAGES="ecto"
(2)安装依赖
$ sudo apt-get install libboost-python-dev libboost-filesystem-dev libboost-system-dev \
libboost-thread-dev python-setuptools python-gobject python-gtk2 graphviz doxygen \
python-sphinx
(3)直接编译将报错,修改ecto下的源码
修改两个文件:网盘上传文件失败,在此粘贴文件内容,可覆盖原路径下的相应文件。
文件一: ~/catkin_guyue1/src/ecto/src/lib/util.cpp :
//
// Copyright (c) 2011, Willow Garage, Inc.
// All rights reserved.
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
// * Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
// * Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the distribution.
// * Neither the name of the Willow Garage, Inc. nor the names of its
// contributors may be used to endorse or promote products derived from
// this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
// AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
// IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
// ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
// LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
// CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
// SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
// INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
// CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
// ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
// POSSIBILITY OF SUCH DAMAGE.
//
#include 文件二:~/catkin_guyue1/src/ecto/src/lib/plasm/impl.hpp
/*
* Copyright (c) 2011, Willow Garage, Inc.
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* * Neither the name of the Willow Garage, Inc. nor the names of its
* contributors may be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*/
#pragma once
#include 接着,单独编译ecto:
cd ~/catkin_guyue1
catkin_make -DCATKIN_WHITELIST_PACKAGES="ecto"
(4)我自己的环境是以上步骤即可成功安装ecto,但部分博客提到还有其他错误,可以参考这个博客。
错误2:缺少 manipulation-msgs
解决方法:见招拆招
cd ~/catkin_guyue1/src
git clone https://github.com/ros-interactive-manipulation/manipulation_msgs.git
cd ~/catkin_guyue1
catkin_make -DCATKIN_WHITELIST_PACKAGES="manipulation_msgs"
可能报错:
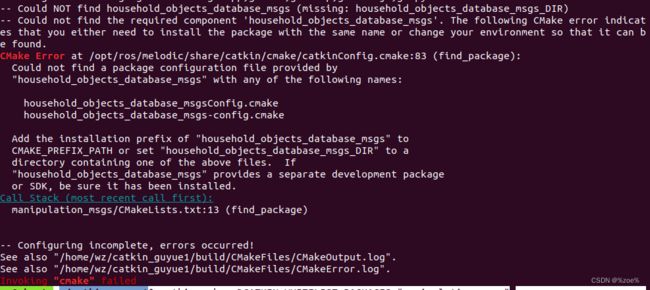
解决办法:
cd ~/catkin_guyue1/src
git clone https://github.com/ros-interactive-manipulation/household_objects_database
cd ~/catkin_guyue1
wz@ubuntu:~/catkin_guyue1$ catkin_make -DCATKIN_WHITELIST_PACKAGES="household_objects_database_msgs"
可能继续报错:

解决办法:
cd ~/catkin_guyue1/src
git clone https://github.com/wg-perception/object_recognition_msgs.git
cd ~/catkin_guyue1
catkin_make -DCATKIN_WHITELIST_PACKAGES="object_recognition_msgs"
成功编译,接着分别执行上述失败的编译语句:
catkin_make -DCATKIN_WHITELIST_PACKAGES="household_objects_database_msgs"
catkin_make -DCATKIN_WHITELIST_PACKAGES="manipulation_msgs"
catkin_make
至此,胡春旭老师《机器人开发实践》的源码在ROS-Melodic系统下编译完成。有问题,欢迎私信。