- 25. 策略模式
智想天开
设计模式详解策略模式bash开发语言
原文地址:策略模式更多内容请关注:智想天开1.策略模式简介策略模式(StrategyPattern)是一种行为型设计模式,它定义了一系列算法,将每一个算法封装起来,并使它们可以相互替换。策略模式让算法的变化独立于使用算法的客户。通过引入策略模式,可以在不修改客户端代码的情况下,动态地更改对象的行为。关键点:算法封装:将不同的算法封装到独立的策略类中。互换性:策略类可以相互替换,客户端可以根据需要选
- 人工智能与网络信息技术的深度融合
鸭鸭鸭进京赶烤
学术会议人工智能AI编程ai机器人计算机视觉网络计算机网络
在当今时代,人工智能(AI)和网络信息技术正以前所未有的速度推动着社会变革。从通用人工智能(AGI)到具身智能的普及,AI不仅实现了技术上的飞跃,也在各个行业展现出巨大的应用潜力。随着技术的不断迭代,我们迎来了许多创新应用,例如AI在电子信息技术中的应用,通过算法优化与升级,显著提高了处理效率和准确性。网络信息技术同样在飞速发展。面向2030年的未来网络发展趋势表明,网络将支撑万亿级、人机物、全时
- OpenCV 4.2.0与扩展模块安装与应用指南
土城三富
本文还有配套的精品资源,点击获取简介:OpenCV4.2.0是一个先进的计算机视觉库,包含了图像处理、计算机视觉和机器学习算法。本压缩包包含OpenCV核心库和扩展模块(opencv_contrib),版本均为4.2.0。该版本引入了性能增强、API优化以及对深度学习框架和硬件加速技术的更新支持。扩展模块提供了额外的实验性算法和功能,有助于研究和开发新算法。指南详细介绍了如何安装和配置这些库,并提
- matlab两矩阵相似性,两个矩阵同时相似对角化MATLAB程序.docx
weixin_39870664
matlab两矩阵相似性
两个矩阵同时相似对角化MATLAB程序摘要:使用Matlab语言设计出实现两个复矩阵同时相似对角化的计算机程序。关键词:同时相似对角化;Matlab;程序矩阵对角化是重要的数学方法,但因其计算过程繁琐,人们往往望之生畏,尤其是多个矩阵同时对角化问题,因此本文设计出判断及计算两个复矩阵能否同时相似对角化的Matlab程序,用此能够方便地解决两个复矩阵同时相似对角化问题。1.理论基础定义[1]:设A、
- java队列实现限流_如何使用队列实现微服务限流算法?
纽太普
java队列实现限流
队列在平时开发中可能是出现频率最高的数据结构之一了,但是大部分情况下,我们都是用别人已经实现好的,比如kafka,比如redis里的list,以至于让人怀疑为什么还要去学习队列呢?希望今天的内容可以给你一些启发。什么是队列为了整个文章的完整性,我们还是来介绍一下什么是队列。我们举个生活中常见的案例,假设你在周杰伦的奶茶店买奶茶,由于人很多,为了保持公平和秩序,你被要求排队,最先来的人排到最前面,这
- YOLOV11|YOLO12改进系列指南
魔鬼面具
YOLO
基于Ultralytics的YOLO11|YOLO12改进目前自带的一些改进方案(持续更新)为了感谢各位对本项目的支持,本项目的赠品是yolov5-PAGCP通道剪枝算法.具体使用教程专栏改进汇总YOLO11系列二次创新系列ultralytics/cfg/models/11/yolo11-RevCol.yaml使用(ICLR2023)ReversibleColumnNetworks对yolo11主
- OpenCV ML 模块使用指南
ice_junjun
OpenCVopencv人工智能计算机视觉
一、模块概述OpenCV的ML模块提供了丰富的机器学习算法,可用于解决各种计算机视觉和数据分析问题。本指南将详细介绍该模块中主要的机器学习算法,包括支持向量机(SVM)、K均值聚类(K-Means)和神经网络(ANN),并结合图像分类和聚类分析这两个典型应用场景进行代码实现与解释。二、主要函数及类详解(一)支持向量机(SVM):cv.ml.SVM_create()功能支持向量机(SVM)是一种强大
- 【研发日记】Matlab/Simulink避坑指南(十一)——Delay周期Bug
Mr.Cssust
Matlab/SimulinkDelay周期SampleTimeDebugMBD嵌入式软件
文章目录前言背景介绍问题描述分析排查解决方案总结归纳前言见《研发日记,Matlab/Simulink避坑指南(六)——字节分割Bug》见《研发日记,Matlab/Simulink避坑指南(七)——数据溢出钳位Bug》见《
- 蓝桥杯——算法训练——粘木棍
大柠丶
蓝桥杯蓝桥杯算法职场和发展
问题描述有N根木棍,需要将其粘贴成M个长木棍,使得最长的和最短的的差距最小。输入格式第一行两个整数N,M。一行N个整数,表示木棍的长度。输出格式一行一个整数,表示最小的差距样例输入32102040样例输出10数据规模和约定N,M<=7packagecom.study.蓝桥杯.算法训练;importjava.util.Arrays;importjava.util.Scanner;/***@autho
- 蓝桥杯——算法训练——共线
大柠丶
蓝桥杯蓝桥杯算法职场和发展
问题描述给定2维平面上n个整点的坐标,一条直线最多能过几个点?输入格式第一行一个整数n表示点的个数以下n行,每行2个整数分别表示每个点的x,y坐标。输出格式输出一个整数表示答案。样例输入50011220323样例输出3数据规模和约定n<=1500,数据保证不会存在2个相同的点。点坐标在int范围内importjava.util.Scanner;/***@authorsjn*@date2022-2-
- BM25S 项目安装和配置指南
陆汝涓Marissa
BM25S项目安装和配置指南bm25sBM25Sisanultra-fastlexicalsearchlibrarythatimplementsBM25usingscipy项目地址:https://gitcode.com/gh_mirrors/bm/bm25s1.项目基础介绍和主要编程语言BM25S是一个快速实现BM25算法的开源项目,主要用于文本检索任务。BM25是一种广泛使用的排名函数,常用于
- 【MATLAB】
不掉发的小刘
MATLABmatlab开发语言
数学计算与运算基础数学函数函数名功能示例sin(x)正弦函数sin(pi/2)→1cos(x)余弦函数cos(0)→1sqrt(x)平方根sqrt(4)→2exp(x)指数函数exp(1)→e≈2.718log(x)自然对数log(e)→1abs(x)绝对值abs(5)→5线性代数函数名功能示例A\b解线性方程组Ax=bA=21;11,b=3;2,x=A\b→x=1;1det(A)矩阵行列式det
- c++算法赛万能模板个人笔记适用蓝桥杯,天梯赛,acm等赛事
a东方青
个人笔记c++算法笔记
算法笔记-更新与2025-3-22点赞收藏+关注持续更新算法基础二分整数二分//在一个单调区间里面去找答案boolcheck(intx){/*...*/}//检查x是否满足某种性质//区间[l,r]被划分成[l,mid]和[mid+1,r]时使用:intbsearch_1(intl,intr){while(l>1;if(check(mid))r=mid;//check()判断mid是否满足性质el
- 一切皆是映射:实现神经网络的硬件加速技术:GPU、ASIC(专用集成电路)和FPGA(现场可编程门阵列)
AI天才研究院
AI大模型企业级应用开发实战DeepSeekR1&大数据AI人工智能大模型计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
文章目录一切皆是映射:实现神经网络的硬件加速技术:GPU、ASIC(专用集成电路)和FPGA(现场可编程门阵列)1.背景介绍2.核心概念与联系3.核心算法原理&具体操作步骤3.1算法原理概述3.2算法步骤详解3.2.1GPU加速3.2.2ASIC加速3.2.3FPGA加速3.3算法优缺点GPUASICFPGA3.4算法应用领域4.数学模型和公式&详细讲解&举例说明4.1数学模型构建4.2公式推导过
- 堆数据结构:从基础原理到高效算法实现的技术探讨
Everyrt
课程设计
摘要堆作为一种特殊的树形数据结构,在多种算法场景中发挥着核心作用。本文深入剖析堆的基础原理,详细阐述堆的构建、插入、删除等操作的实现细节,并探讨其在优先队列、堆排序等高效算法中的应用,助力读者全面掌握堆数据结构及其应用技术。一、引言堆数据结构以其独特的特性,能够高效地获取集合中的最大(或最小)元素。无论是操作系统中的进程调度,还是搜索算法中的最优解筛选,堆都扮演着不可或缺的角色。理解堆的原理与实现
- 蓝桥大使【算法赛】----贪心算法
wyshh119
算法学习贪心算法
这里比较的难点在于sort排序的根据是什么,为什么是两人的报酬差,我的理解是当两人报酬差越大,那么总报酬的损失就越大,其实是缺少具体的证明的,但是通过就说明确实是这样。也就不深究证明了。#include#includeusingnamespacestd;longlongans=0;constintN=100005;structnode{//结构体inta;intb;};nodea[N];intma
- 算法设计与分析4(变治法)
songx_99
算法设计与分析算法
变治法将问题转化为一个或数个有一定关联当形式上不同的更加简单或更加好解决的子问题。变治法的应用:预排序思想用预排序可以简化许多问题,如检查元素唯一性,检查出现次数最多的元素等堆算法堆的定义首先它是一个完全二叉树,完全二叉树表明树的每一层都是满的,只有最后一层最右边的元素有可能缺位。且父结点的值大于它的两个子节点,则称是一个大根堆,若值小于两个子节点,称小根堆堆化有向下调整,向上调整两种,大致思路相
- 动态规划算法--找零方式
大王算法
数据结构和算法实战宝典算法动态规划c++
一、问题介绍给定数组arr,arr中所有的值都为正数且不重复。每个值代表一种面值的货币,每种面值的货币可以使用任意张,再给定一个整数aim,代表要找的钱数,求所有的找零方法有多少种。二、算法思路枚举法,列出使用某张钞票n次的所有可能。1、暴力递归intprocess1(intn,intarr[],intindex,intrest){if(index==n)returnrest==0?1:0;int
- 位图思想详解:用一个小小的比特征服整个世界
Joseit
优选算法java算法
位图思想详解:用一个小小的比特征服整个世界一、什么是位图?二、位图的形象理解三、位图的Java实现四、位图的算法原理剖析五、实际应用案例:网站用户活跃度统计五、真实的应用场景:布隆过滤器的基础六、算法题:判断字符是否唯一(easy)一、什么是位图?位图是一种超级节省空间的数据结构,他利用二进制位(0/1)来表示某个元素是否存在或某种状态是否为真。想象一下,用一个小小的比特位就能记录一个信息,这简直
- PCL基础:pcl::SACSegmentation<PointXYZRGBN>函数全面说明,一遍文章精通平面分割算法
多宝Kim
#PCL点云库使用笔记c++算法windowsvisualstudio
创作不易,如果本篇文章能够给你提供帮助,请点赞鼓励+收藏备查+关注获取最新技术动态,支持作者输出高质量干货!(一般在周末更新技术干货)`pcl::SACSegmentation`是PointCloudLibrary(PCL)中用于进行随机抽样一致性(RandomSampleConsensus,RANSAC)平面分割的类模板,模板参数`PointXYZRGBN`表示点云中点的类型,该类型包含三维坐标
- 算法及数据结构系列 - 动态规划
诺亚凹凸曼
算法及数据结构算法数据结构动态规划
系列文章目录算法及数据结构系列-二分查找算法及数据结构系列-BFS算法文章目录框架思路子序列问题解题模板一维dp数组二维dp数组经典题型322.零钱兑换暴力递归带备忘录的暴力递归动态规划300.最长上升子序列1143.最长公共子序列72.编辑距离框架思路动态规划问题的一般形式就是求最值。动态规划其实是运筹学的一种最优化方法,只不过在计算机问题上应用比较多,比如说求最长递增子序列,最小编辑距离等等。
- 小白零基础学数学建模系列-引言与课程目录
川川菜鸟
数学建模小白到精通系列数学建模
目录引言一、我们的专辑包含哪些内容?第一周:数学建模基础与工具第二周:高级数学建模技巧与应用第三周:机器学习基础与数据处理第四周:监督学习与无监督学习算法第五周:神经网络二、学完本专辑能收获到什么?三、适合什么样的人群学习?四、如何学习本专辑?课程目录第1周:数学建模基础与工具第1天:数学建模入门介绍第2天:数学建模工具介绍第3天:线性回归与曲线拟合第4天:线性规划第5天:动态规划第2周:高级数学
- C++基础系列【26】排序和查找算法
程序喵大人
C++基础系列c语言算法开发语言c++
博主介绍:程序喵大人35-资深C/C++/Rust/Android/iOS客户端开发10年大厂工作经验嵌入式/人工智能/自动驾驶/音视频/游戏开发入门级选手《C++20高级编程》《C++23高级编程》等多本书籍著译者更多原创精品文章,首发gzh,见文末记得订阅专栏,以防走丢C++基础系列专栏C语言基础系列专栏C++大佬养成攻略专栏C++训练营排序与查找算法的重要性不用过多介绍了吧,面试也经常考察。
- 遗传算法-变异算法
ArthurKingYs
遗传算法遗传算法神经网络
遗传算法系列(4)变异算法在基因交叉之后产生的子代个体,其变量可能以很小的概率或者步长发生转变,这个过程称为变异(Mutation)。如果进化的目标函数极值是单峰值的,那么,将变异概率p设置为种群数量n的倒数是一个比较好的选择。如果变异概率很大,那么整个搜索过程就退化为一个随机搜索过程。所以,比较稳妥的做法是,进化过程刚刚开始的时候,取p为一个比较大的概率,随着搜索过程的进行,p逐渐缩小到0附近。
- 初始OpenCV
指尖下的技术
OpenCVopencv人工智能计算机视觉
OpenCV是一个功能强大、应用广泛的计算机视觉库,它为开发人员提供了丰富的工具和算法,可以帮助他们快速构建各种视觉应用。随着计算机视觉技术的不断发展,OpenCV也将会继续发挥重要的作用。OpenCV提供了大量的计算机视觉算法和图像处理工具,广泛应用于图像和视频的处理、分析以及机器学习领域。所以学习人计算机视觉或者图像处理方面的知识,OpenCV是一个要重点学习的工具库。首先介绍一下OpenCV
- 遗传算法均匀变异
huahua20190514
importnumpyasnpimportrandompop_1=np.array([[1,11,21,9,16,10,8,17],[2,12,22,10,17,11,9,18],[3,13,23,11,18,12,10
- 01年实习生被曝负责字节RL核心算法!系字节LLM攻坚小组成员
量子位
一个超越DeepSeekGRPO的关键RL算法出现了!用上该算法后,Qwen2.5-32B模型只经过RL训练,不引入蒸馏等其他技术,在AIME2024基准上拿下50分,优于相同setting下使用GRPO算法的DeepSeek-R1-Zero-Qwen,且DAPO使用的训练步数还减少了50%。这个算法名为DAPO,字节、清华AIR联合实验室SIALab出品,现已开源。论文通讯作者和开源项目负责人都
- CSP-J备考冲刺必刷题(C++) | AcWing 1253 家谱
热爱编程的通信人
c++开发语言
本文分享的必刷题目是从蓝桥云课、洛谷、AcWing等知名刷题平台精心挑选而来,并结合各平台提供的算法标签和难度等级进行了系统分类。题目涵盖了从基础到进阶的多种算法和数据结构,旨在为不同阶段的编程学习者提供一条清晰、平稳的学习提升路径。欢迎大家订阅我的专栏:算法题解:C++与Python实现!附上汇总贴:算法竞赛备考冲刺必刷题(C++)|汇总【题目来源】Acwing:1253.家谱-AcWing题库
- 栈和队列基础
Luther coder
算法
目录一.队列简述二.栈三.例题一.队列简述队列多用于辅助,很少有单独的题目。例如图的BFS,需要队列辅助实现。常见运用:单调队列:概念和单调栈类似。应用很少,多用于对一些算法的优化(动态规划等),不再赘述。优先队列:普通的队列是一种先进先出的数据结构,元素在队列尾追加,而从队列头删除。在优先队列中,元素被赋予优先级。当访问元素时,具有最高优先级的元素最先删除。优先队列具有最高级先出的特征。基于堆(
- 华为OD机试 - 相对开音节 - 正则表达式(Python/JS/C/C++ 2024 E卷 100分)
哪 吒
华为od正则表达式python
华为OD机试2024E卷题库疯狂收录中,刷题点这里专栏导读本专栏收录于《华为OD机试真题(Python/JS/C/C++)》。刷的越多,抽中的概率越大,私信哪吒,备注华为OD,加入华为OD刷题交流群,每一题都有详细的答题思路、详细的代码注释、3个测试用例、为什么这道题采用XX算法、XX算法的适用场景,发现新题目,随时更新。一、题目描述相对开音节构成的结构为辅音+元音(aeiou)+辅音(r除外)+
- 强大的销售团队背后 竟然是大数据分析的身影
蓝儿唯美
数据分析
Mark Roberge是HubSpot的首席财务官,在招聘销售职位时使用了大量数据分析。但是科技并没有挤走直觉。
大家都知道数理学家实际上已经渗透到了各行各业。这些热衷数据的人们通过处理数据理解商业流程的各个方面,以重组弱点,增强优势。
Mark Roberge是美国HubSpot公司的首席财务官,HubSpot公司在构架集客营销现象方面出过一份力——因此他也是一位数理学家。他使用数据分析
- Haproxy+Keepalived高可用双机单活
bylijinnan
负载均衡keepalivedhaproxy高可用
我们的应用MyApp不支持集群,但要求双机单活(两台机器:master和slave):
1.正常情况下,只有master启动MyApp并提供服务
2.当master发生故障时,slave自动启动本机的MyApp,同时虚拟IP漂移至slave,保持对外提供服务的IP和端口不变
F5据说也能满足上面的需求,但F5的通常用法都是双机双活,单活的话还没研究过
服务器资源
10.7
- eclipse编辑器中文乱码问题解决
0624chenhong
eclipse乱码
使用Eclipse编辑文件经常出现中文乱码或者文件中有中文不能保存的问题,Eclipse提供了灵活的设置文件编码格式的选项,我们可以通过设置编码 格式解决乱码问题。在Eclipse可以从几个层面设置编码格式:Workspace、Project、Content Type、File
本文以Eclipse 3.3(英文)为例加以说明:
1. 设置Workspace的编码格式:
Windows-&g
- 基础篇--resources资源
不懂事的小屁孩
android
最近一直在做java开发,偶尔敲点android代码,突然发现有些基础给忘记了,今天用半天时间温顾一下resources的资源。
String.xml 字符串资源 涉及国际化问题
http://www.2cto.com/kf/201302/190394.html
string-array
- 接上篇补上window平台自动上传证书文件的批处理问卷
酷的飞上天空
window
@echo off
: host=服务器证书域名或ip,需要和部署时服务器的域名或ip一致 ou=公司名称, o=公司名称
set host=localhost
set ou=localhost
set o=localhost
set password=123456
set validity=3650
set salias=s
- 企业物联网大潮涌动:如何做好准备?
蓝儿唯美
企业
物联网的可能性也许是无限的。要找出架构师可以做好准备的领域然后利用日益连接的世界。
尽管物联网(IoT)还很新,企业架构师现在也应该为一个连接更加紧密的未来做好计划,而不是跟上闸门被打开后的集成挑战。“问题不在于物联网正在进入哪些领域,而是哪些地方物联网没有在企业推进,” Gartner研究总监Mike Walker说。
Gartner预测到2020年物联网设备安装量将达260亿,这些设备在全
- spring学习——数据库(mybatis持久化框架配置)
a-john
mybatis
Spring提供了一组数据访问框架,集成了多种数据访问技术。无论是JDBC,iBATIS(mybatis)还是Hibernate,Spring都能够帮助消除持久化代码中单调枯燥的数据访问逻辑。可以依赖Spring来处理底层的数据访问。
mybatis是一种Spring持久化框架,要使用mybatis,就要做好相应的配置:
1,配置数据源。有很多数据源可以选择,如:DBCP,JDBC,aliba
- Java静态代理、动态代理实例
aijuans
Java静态代理
采用Java代理模式,代理类通过调用委托类对象的方法,来提供特定的服务。委托类需要实现一个业务接口,代理类返回委托类的实例接口对象。
按照代理类的创建时期,可以分为:静态代理和动态代理。
所谓静态代理: 指程序员创建好代理类,编译时直接生成代理类的字节码文件。
所谓动态代理: 在程序运行时,通过反射机制动态生成代理类。
一、静态代理类实例:
1、Serivce.ja
- Struts1与Struts2的12点区别
asia007
Struts1与Struts2
1) 在Action实现类方面的对比:Struts 1要求Action类继承一个抽象基类;Struts 1的一个具体问题是使用抽象类编程而不是接口。Struts 2 Action类可以实现一个Action接口,也可以实现其他接口,使可选和定制的服务成为可能。Struts 2提供一个ActionSupport基类去实现常用的接口。即使Action接口不是必须实现的,只有一个包含execute方法的P
- 初学者要多看看帮助文档 不要用js来写Jquery的代码
百合不是茶
jqueryjs
解析json数据的时候需要将解析的数据写到文本框中, 出现了用js来写Jquery代码的问题;
1, JQuery的赋值 有问题
代码如下: data.username 表示的是: 网易
$("#use
- 经理怎么和员工搞好关系和信任
bijian1013
团队项目管理管理
产品经理应该有坚实的专业基础,这里的基础包括产品方向和产品策略的把握,包括设计,也包括对技术的理解和见识,对运营和市场的敏感,以及良好的沟通和协作能力。换言之,既然是产品经理,整个产品的方方面面都应该能摸得出门道。这也不懂那也不懂,如何让人信服?如何让自己懂?就是不断学习,不仅仅从书本中,更从平时和各种角色的沟通
- 如何为rich:tree不同类型节点设置右键菜单
sunjing
contextMenutreeRichfaces
组合使用target和targetSelector就可以啦,如下: <rich:tree id="ruleTree" value="#{treeAction.ruleTree}" var="node" nodeType="#{node.type}"
selectionChangeListener=&qu
- 【Redis二】Redis2.8.17搭建主从复制环境
bit1129
redis
开始使用Redis2.8.17
Redis第一篇在Redis2.4.5上搭建主从复制环境,对它的主从复制的工作机制,真正的惊呆了。不知道Redis2.8.17的主从复制机制是怎样的,Redis到了2.4.5这个版本,主从复制还做成那样,Impossible is nothing! 本篇把主从复制环境再搭一遍看看效果,这次在Unbuntu上用官方支持的版本。 Ubuntu上安装Red
- JSONObject转换JSON--将Date转换为指定格式
白糖_
JSONObject
项目中,经常会用JSONObject插件将JavaBean或List<JavaBean>转换为JSON格式的字符串,而JavaBean的属性有时候会有java.util.Date这个类型的时间对象,这时JSONObject默认会将Date属性转换成这样的格式:
{"nanos":0,"time":-27076233600000,
- JavaScript语言精粹读书笔记
braveCS
JavaScript
【经典用法】:
//①定义新方法
Function .prototype.method=function(name, func){
this.prototype[name]=func;
return this;
}
//②给Object增加一个create方法,这个方法创建一个使用原对
- 编程之美-找符合条件的整数 用字符串来表示大整数避免溢出
bylijinnan
编程之美
import java.util.LinkedList;
public class FindInteger {
/**
* 编程之美 找符合条件的整数 用字符串来表示大整数避免溢出
* 题目:任意给定一个正整数N,求一个最小的正整数M(M>1),使得N*M的十进制表示形式里只含有1和0
*
* 假设当前正在搜索由0,1组成的K位十进制数
- 读书笔记
chengxuyuancsdn
读书笔记
1、Struts访问资源
2、把静态参数传递给一个动作
3、<result>type属性
4、s:iterator、s:if c:forEach
5、StringBuilder和StringBuffer
6、spring配置拦截器
1、访问资源
(1)通过ServletActionContext对象和实现ServletContextAware,ServletReque
- [通讯与电力]光网城市建设的一些问题
comsci
问题
信号防护的问题,前面已经说过了,这里要说光网交换机与市电保障的关系
我们过去用的ADSL线路,因为是电话线,在小区和街道电力中断的情况下,只要在家里用笔记本电脑+蓄电池,连接ADSL,同样可以上网........
- oracle 空间RESUMABLE
daizj
oracle空间不足RESUMABLE错误挂起
空间RESUMABLE操作 转
Oracle从9i开始引入这个功能,当出现空间不足等相关的错误时,Oracle可以不是马上返回错误信息,并回滚当前的操作,而是将操作挂起,直到挂起时间超过RESUMABLE TIMEOUT,或者空间不足的错误被解决。
这一篇简单介绍空间RESUMABLE的例子。
第一次碰到这个特性是在一次安装9i数据库的过程中,在利用D
- 重构第一次写的线程池
dieslrae
线程池 python
最近没有什么学习欲望,修改之前的线程池的计划一直搁置,这几天比较闲,还是做了一次重构,由之前的2个类拆分为现在的4个类.
1、首先是工作线程类:TaskThread,此类为一个工作线程,用于完成一个工作任务,提供等待(wait),继续(proceed),绑定任务(bindTask)等方法
#!/usr/bin/env python
# -*- coding:utf8 -*-
- C语言学习六指针
dcj3sjt126com
c
初识指针,简单示例程序:
/*
指针就是地址,地址就是指针
地址就是内存单元的编号
指针变量是存放地址的变量
指针和指针变量是两个不同的概念
但是要注意: 通常我们叙述时会把指针变量简称为指针,实际它们含义并不一样
*/
# include <stdio.h>
int main(void)
{
int * p; // p是变量的名字, int *
- yii2 beforeSave afterSave beforeDelete
dcj3sjt126com
delete
public function afterSave($insert, $changedAttributes)
{
parent::afterSave($insert, $changedAttributes);
if($insert) {
//这里是新增数据
} else {
//这里是更新数据
}
}
- timertask
shuizhaosi888
timertask
java.util.Timer timer = new java.util.Timer(true);
// true 说明这个timer以daemon方式运行(优先级低,
// 程序结束timer也自动结束),注意,javax.swing
// 包中也有一个Timer类,如果import中用到swing包,
// 要注意名字的冲突。
TimerTask task = new
- Spring Security(13)——session管理
234390216
sessionSpring Security攻击保护超时
session管理
目录
1.1 检测session超时
1.2 concurrency-control
1.3 session 固定攻击保护
- 公司项目NODEJS实践0.3[ mongo / session ...]
逐行分析JS源代码
mongodbsessionnodejs
http://www.upopen.cn
一、前言
书接上回,我们搭建了WEB服务端路由、模板等功能,完成了register 通过ajax与后端的通信,今天主要完成数据与mongodb的存取,实现注册 / 登录 /
- pojo.vo.po.domain区别
LiaoJuncai
javaVOPOJOjavabeandomain
POJO = "Plain Old Java Object",是MartinFowler等发明的一个术语,用来表示普通的Java对象,不是JavaBean, EntityBean 或者 SessionBean。POJO不但当任何特殊的角色,也不实现任何特殊的Java框架的接口如,EJB, JDBC等等。
即POJO是一个简单的普通的Java对象,它包含业务逻辑
- Windows Error Code
OhMyCC
windows
0 操作成功完成.
1 功能错误.
2 系统找不到指定的文件.
3 系统找不到指定的路径.
4 系统无法打开文件.
5 拒绝访问.
6 句柄无效.
7 存储控制块被损坏.
8 存储空间不足, 无法处理此命令.
9 存储控制块地址无效.
10 环境错误.
11 试图加载格式错误的程序.
12 访问码无效.
13 数据无效.
14 存储器不足, 无法完成此操作.
15 系
- 在storm集群环境下发布Topology
roadrunners
集群stormtopologyspoutbolt
storm的topology设计和开发就略过了。本章主要来说说如何在storm的集群环境中,通过storm的管理命令来发布和管理集群中的topology。
1、打包
打包插件是使用maven提供的maven-shade-plugin,详细见maven-shade-plugin。
<plugin>
<groupId>org.apache.maven.
- 为什么不允许代码里出现“魔数”
tomcat_oracle
java
在一个新项目中,我最先做的事情之一,就是建立使用诸如Checkstyle和Findbugs之类工具的准则。目的是制定一些代码规范,以及避免通过静态代码分析就能够检测到的bug。 迟早会有人给出案例说这样太离谱了。其中的一个案例是Checkstyle的魔数检查。它会对任何没有定义常量就使用的数字字面量给出警告,除了-1、0、1和2。 很多开发者在这个检查方面都有问题,这可以从结果
- zoj 3511 Cake Robbery(线段树)
阿尔萨斯
线段树
题目链接:zoj 3511 Cake Robbery
题目大意:就是有一个N边形的蛋糕,切M刀,从中挑选一块边数最多的,保证没有两条边重叠。
解题思路:有多少个顶点即为有多少条边,所以直接按照切刀切掉点的个数排序,然后用线段树维护剩下的还有哪些点。
#include <cstdio>
#include <cstring>
#include <vector&
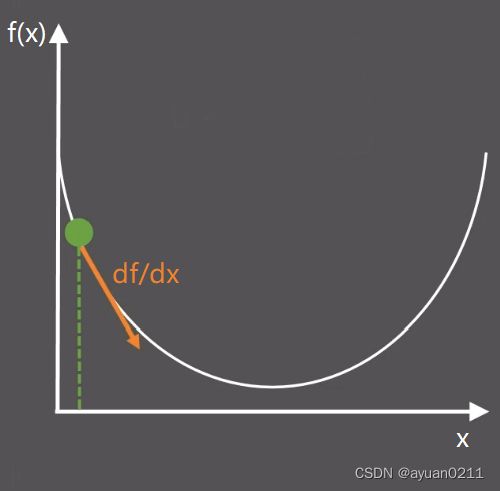
 ,那么梯度就是f函数的偏导数,
,那么梯度就是f函数的偏导数,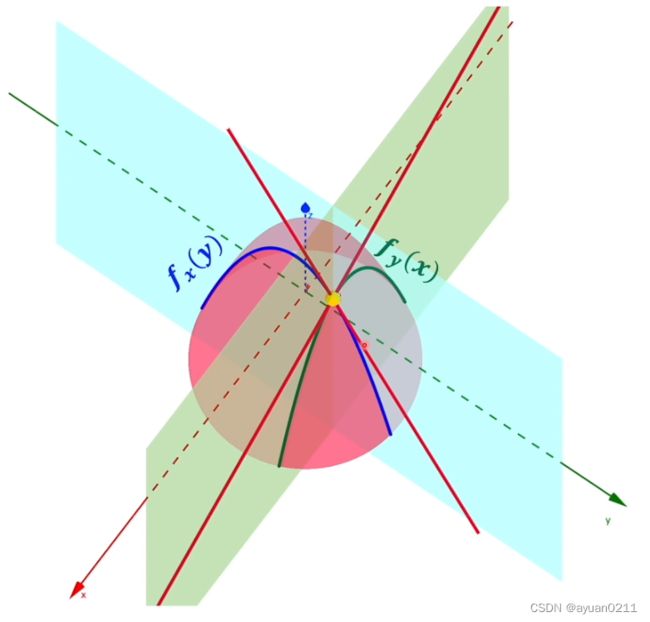
 [优化参数]。
[优化参数]。 ,如果下降太快,容易陷入局部最优,所以需要选取合适的
,如果下降太快,容易陷入局部最优,所以需要选取合适的