三维重建之条纹投影结构光(一)
该系列为条纹投影结构光学习笔记,一共分为四篇。第一篇记录文献阅读的笔记,对重要知识点进行摘录介绍;第二篇为相位求解和相位展开;第三篇为相高模型的标定;第四篇为重构篇。
本篇以理论知识为主,主要从以下三个方面进行介绍,首先介绍条纹投影的三维重建测量原理;然后介绍相位和高度的模型,即相-高模型,最后介绍相位主值的求解和相位展开。本篇博文不涉及具体的代码实现。
条纹投影结构光测量原理
参考论文来源:结构光三维成像技术,四川大学,苏显渝
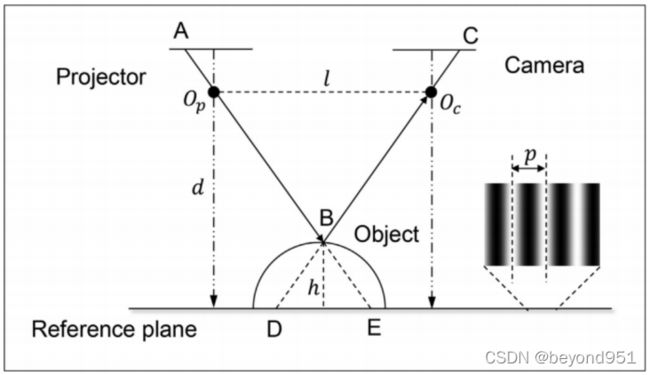
结构光三维成像技术是一种利用辅助的结构光照明获取物体三维像的技术,它采用的技术方案是投影一个载频条纹到被成像的物体表面,利用成像设备从另一个角度记录受被成像物体高度调制的变形条纹图像,再从获取的变形条纹图中数字解调重建出被测物体的三维数字像。其成像系统示意图如下图所示:

为什么相位可以反映物体的高度信息?
当一个正弦光栅图形被投影到三维漫反射物体表面时,从成像系统获取的变形光栅像可表示为:
![]()
式中R(x,y)是物体表面不均匀的反射率,即光学影像,包括物体表面的灰度和色度信息,C表示均匀的投影光强,相位函数Φ(x,y)表示了条纹的相位。当漫反射物体是一个标准平面(参考平面)时,条纹的相位具有线性分布的特点:
![]()
式中Po为在参考平面上条纹的周期。当漫反射物体是分布在h(x,y)的三维表面时,增加了由高度引起的附加相位调制:
![]()
式中λe为等效波长,一个等效波长正好等于引起2π相位变化量的高度变化。这时,从成像系统获取的变形光栅像可表示为

由于物体表面的高度变化引起的条纹相位变化,导致观察到变形条纹。通过相移技术人们很容易从多帧相移条纹图形种分离出Φ(x,y),从而重建h(x,y)的分布,通过相移技术也可以从条纹的调制度中分离 出R(x,y),获 得 物 体 表 面 的 光 学 影 像。
因此,市面上主流的投影重构方法基于Φ(x,y)求解出物体的真实高度信息;基于R(x,y)还原出物体的本身的色彩。
重要点:
1、条纹投影实现物体的三维重建,是将相位-高度建立一个数学模型,得到相位之后可以得到物体的高度信息。
2、我们知道相位是有取值范围的,为[0,2π],但真实世界中物体的高度没有这种局限性,相位求出来是一个周期振荡的范围值。
基于上面两个重点,引出后续两个重要概念:标定模型即相-高模型,相位值的求解和展开。
相位—高度模型
参考来源:Calibration of fringe projection profilometry: A comparative review,南京理工大学,左超
标定模型一般可以分为两种,第一种为我们一直提到的相-高模型,即相位与真实世界高度的模型;第二种为三角立体模型,投影仪被当做逆相机(投影图案即当做投影仪成像图案),通过匹配相机、投影仪的相位同名点,利用三角测距法进行重建。第二种就是双目结构光,相位的作用用于标记每个图像上的像素点,然后相机1和相机2根据匹配到的点,利用三角测量进行重建。这部分内容在此不再赘述。下面对相高模型进行展开:
典型相位-高度模型
平行轴模型

根据三角测量原理,我们可以得到相高模型如下:
非平行轴模型
非平行轴模型消除了光轴平行假设,保持距离不变,并稍微旋转相机或投影仪,如图所示。

线性相位—高度模型
在平行轴相位—高度模型基础上,如果l>>DE,则公式可以进一步简化
可以得到如下模型:

逆线性相位—高度模型
逆线性(1)
相位-高度可以由如下关系表示:

数学模型表达式为:
![]()
其中,ΔΦ(x,y)是相位差,a(x,y),b(x,y)是待标定参数。
逆线性(2)
对于上述公式,进行移项可得:
![]()
多项式相位—高度模型
上述逆线性相位—高度模型也可以表示为:
![]()

基于这个模型可以看到,相高模型标定的过程为a、b、c三个参数求解的过程。这里参考的来源为:利用三频外差实现的小视场三维测量系统,四川大学,艾佳;后续相位的求解和展开也是基于这篇论文。
至此,相高模型总结完毕。接下来,对相位求解和相位展开进行阐述。
相位计算
相位计算主要分为两步,第一步为相位主值求取;第二步为相位展开。这里针对四步相移法和三频外差法进行阐述。
相位主值求取—四步相移法
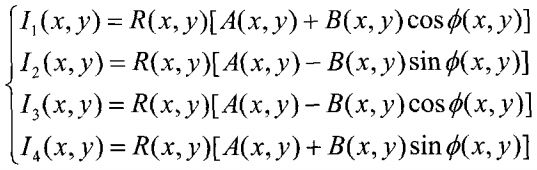
由上面可以计算得到的相位函数Φ(x,y)为
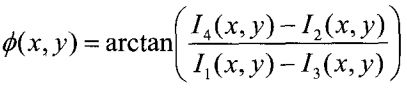
由于是通过反正切 函数计算相位信息,因此所得的相位值都是被截断在(-π,π]区间内的不连续相位。 为 了得到连续 的相位分布 ,需要进行相位展开。采用三频外差方法进行相位展开。
相位展开—三频外差法

其中NINT(·)为四舍五入取整运算。
然后外差得到的条纹周期数为1的相位分布等同于Φw(1)等同于已展开的相位Φu(1),以它为起始相位逐级向上进行相位展开:

其中v=√s表示不同外差级次的倍率,而k逐级去2、3。通过最小二乘法对展开相位进行拟合,计算得到的斜率表示为:

再将斜率乘以最大投影条纹数,即可得到最终的展开相位ΔΦ。

综上上述,总结完毕。
接下文:
三维重建之条纹投影结构光(二)——四步相移+三频外差法 https://blog.csdn.net/beyond951/article/details/123769596?spm=1001.2014.3001.5501
https://blog.csdn.net/beyond951/article/details/123769596?spm=1001.2014.3001.5501