(02)Cartographer源码无死角解析-(38) PoseExtrapolator→AdvanceImuTracker()、ImuTracker姿态推断
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
在上一篇博客中,对 src/cartographer/cartographer/mapping/pose_extrapolator.cc 文件中的 PoseExtrapolator::AddPose() 进行了讲解,其中有两个重要的函数:
// 根据加入的pose计算线速度与角速度
UpdateVelocitiesFromPoses();
// 将imu_tracker_更新到time时刻
AdvanceImuTracker(time, imu_tracker_.get());
前者 UpdateVelocitiesFromPoses() 会根据剪裁过的 timed_pose_queue_ 队列数据,计算线速度与角速度,分别存储在成员变量 linear_velocity_from_poses_ 与 angular_velocity_from_poses_ 之中。对于后者 AdvanceImuTracker() 函数暂未分析,另外在 PoseExtrapolator::AddPose() 函数中,还创建了好些 ImuTracker 对象指针:
imu_tracker_ = absl::make_unique<ImuTracker>(gravity_time_constant_, tracker_start);
odometry_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
extrapolation_imu_tracker_ = absl::make_unique<ImuTracker>(*imu_tracker_);
很明显,接下来的内容与 ImuTracker 这个类是息息相关的了,前面一直在逃避,闲现在肯定躲避不了了,不过没有关系,对齐进行详细分析即可。该类也比较简单,实现于 src/cartographer/cartographer/mapping/imu_tracker.cc 文件中。
顺着该思路阅读源码: \color{red}顺着该思路阅读源码: 顺着该思路阅读源码: ImuTracker 这个类主要的作用,是可以输入一个时间 time,然后预测出该时间点的姿态 orientation_。其预测的原理,是利用上一时刻 Imu 的角速度。另外还会利用 Imu 的线性加速度对最新的 orientation_ 进行校正。
二、构造函数
在 ImuTracker 中定义了如下成员变量:
private:
const double imu_gravity_time_constant_; //Imu 重力时间参量,
common::Time time_; //时间点
common::Time last_linear_acceleration_time_; //最后(最近)线性加速度的时间点
Eigen::Quaterniond orientation_; //四元数表示的旋转
Eigen::Vector3d gravity_vector_; //重力方向向量
Eigen::Vector3d imu_angular_velocity_; //Imu角速度
如果不是很明白其含义,也没有关系,先来看一下 ImuTracker 的构造函数:
/**
* @brief Construct a new Imu Tracker:: Imu Tracker object
*
* @param[in] imu_gravity_time_constant 这个值在2d与3d情况下都为10
* @param[in] time
*/
ImuTracker::ImuTracker(const double imu_gravity_time_constant,
const common::Time time)
: imu_gravity_time_constant_(imu_gravity_time_constant),
time_(time),
last_linear_acceleration_time_(common::Time::min()),
orientation_(Eigen::Quaterniond::Identity()), // 初始方向角
gravity_vector_(Eigen::Vector3d::UnitZ()), // 重力方向初始化为[0,0,1]
imu_angular_velocity_(Eigen::Vector3d::Zero()) {}
首先传入一个重力时间常量,通过初始化列表赋值给 imu_gravity_time_constant_,时间点 time_ 也一样。稍后再来看该时间点具体是什么的时间点。初始化 last_linear_acceleration_time_ 为最小时间点。orientation_ 初始化为实部为1,虚部为0的四元数,可以理解为单位旋转矩阵。
g r a v i t y _ v e c t o r _ \color{red} gravity\_vector\_ gravity_vector_ 是一个比较重要的变量,初始化的 gravity_vector_ 是一个单位向量 (0,0,1)。显然,初始时 orientation_ 与 gravity_vector_ 乘积也为(0,0,1)。另外需要知道,世界坐标系中,Z轴是与重力方向平行的。
最后剩下的 imu_angular_velocity_变量初始化成全为0的向量。ImuTracker 中的有三个成员函数:
void ImuTracker::Advance(const common::Time time) {CHECK_LE(time_, time);
void ImuTracker::AddImuLinearAccelerationObservation(const Eigen::Vector3d& imu_linear_acceleration)
void ImuTracker::AddImuAngularVelocityObservation(const Eigen::Vector3d& imu_angular_velocity)
其并没有相互调用关系,那么就按顺序来,一个一个对其进行分析吧。
三、ImuTracker::Advance()
该成员函数,需要传入一个时间参数 const common::Time time。代码注释如下:
/**
* @brief 预测出time时刻的姿态与重力方向
*
* @param[in] time 要预测的时刻
*/
void ImuTracker::Advance(const common::Time time) {
CHECK_LE(time_, time);
const double delta_t = common::ToSeconds(time - time_);
// 上一时刻的角速度乘以时间,得到当前时刻相对于上一时刻的预测的姿态变化量,再转换成四元数
const Eigen::Quaterniond rotation =
transform::AngleAxisVectorToRotationQuaternion(
Eigen::Vector3d(imu_angular_velocity_ * delta_t));
// 使用上一时刻的姿态 orientation_ 乘以姿态变化量, 得到当前时刻的预测出的姿态
orientation_ = (orientation_ * rotation).normalized();
// 根据预测出的姿态变化量,预测旋转后的线性加速度的值
gravity_vector_ = rotation.conjugate() * gravity_vector_;
// 更新时间
time_ = time;
}
( 1 ) \color{blue}(1) (1) 传入的时间参数 time 其会计算与 time_ 的差值,获得时间段 delta_t。然后调用了 transform::AngleAxisVectorToRotationQuaternion() 函数,该函数的作用与前面介绍的 transform::RotationQuaternionToAngleAxisVector() 函数用作刚好相反,可以把一个轴角(旋转向量转换成一个四元数)
可以参考 史上最简SLAM零基础解读(8.1) - 旋转矩阵、旋转向量、欧拉角推导与相互转换,其中有相关公式的推导过程。这里是通过角速度乘以时间段求轴角(旋转向量)的,具体公式推导再上一篇博客已经进行过推导,这里就不在重复了。
( 2 ) \color{blue}(2) (2) 通过步骤(1) 求解出来的时上一时刻到 time_ 到 time 时刻(当前)的姿态变换rotation,这里
①记 time_ 时刻的姿态 orientation_ 记为 o r i e n t a t i o n t i m e _ i n i t orientation^{init}_{time\_} orientationtime_init,其中 init 表示初始姿态。
②记 time 时刻的姿态,为 o r i e n t a t i o n t i m e i n i t orientation^{init}_{time} orientationtimeinit其中 init 表示初始姿态。
③记 rotation,为 r o t a t i o n t i m e t i m e _ rotation^{time\_}_{time} rotationtimetime_,表示 time_ 时刻到 time 时刻的之态变化。
显然成立如下公式:
o r i e n t a t i o n t i m e i n i t = o r i e n t a t i o n t i m e _ i n i t ∗ r o t a t i o n t i m e t i m e _ (01) \color{Green} \tag{01} orientation^{init}_{time} =orientation^{init}_{time\_} * rotation^{time\_}_{time} orientationtimeinit=orientationtime_init∗rotationtimetime_(01),
( 3 ) \color{blue}(3) (3) rotation表示绕旋转轴逆时针旋转一定角度,那么 rotation.conjugate() 表示绕旋转轴顺时针旋转一定角度。可知:
gravity_vector_ = rotation.conjugate() * gravity_vector_;
表示 gravity_vector_ 绕 rotation 的旋转轴顺时针旋转一定角度,其与步骤(2)是相反的。rotation 是一个位姿变换,该变换的共轭作用作用在 gravity_vector_ 之后,再重新赋值给 gravity_vector_。
①rotation与前面保持一致,记为 r o t a t i o n t i m e t i m e _ rotation^{time\_}_{time} rotationtimetime_,
②gravity_vector_ 表示相对于初始状态的线性加速度
③记 g r a v i t y _ v e c t o r t i m e _ i n i t gravity\_vector^{init}_{time\_} gravity_vectortime_init,表示相对于初始状态的 time_ 时刻的线性加速度。
④记 g r a v i t y _ v e c t o r t i m e i n i t gravity\_vector^{init}_{time} gravity_vectortimeinit,表示相对于初始状态的 time 时刻的线性加速度。
⑤ 记 g r a v i t y _ v e c t o r t i m e t i m e _ 记gravity\_vector^{time\_}_{time} 记gravity_vectortimetime_,表示相对于time_ 时刻下 time 时刻的线性加速度。
构造函数中 gravity_vector_ 初始状态为(0,0,1),记为,根据上面几号,可以推导出如下数学公式:
g r a v i t y _ v e c t o r t i m e _ t i m e = [ r o t a t i o n t i m e t i m e _ ] − 1 ∗ g r a v i t y _ v e c t o r t i m e _ i n i t (02) \color{Green} \tag{02}gravity\_vector^{time}_{time\_} =[rotation^{time\_}_{time}]^{-1}*gravity\_vector^{init}_{time\_} gravity_vectortime_time=[rotationtimetime_]−1∗gravity_vectortime_init(02)该公式看起来貌似不知道做啥,把 gravity_vector 绕 了 rotation 反方向旋转一定角度?因为四元数的共轭表示绕旋转轴反向旋转(顺时针)。
总结: \color{red} 总结: 总结:有的朋友可能比较迷糊,为什么步骤(2)与步骤(3),也就是对 orientation_ 与 gravity_vector_的更新是相反的。这里是埋了一个伏笔,注意到
→ o r i e n t a t i o n _ 初始化时,实部为 1 ,虚部为 0 。 \color{red} →orientation\_ 初始化时,实部为1,虚部为0。 →orientation_初始化时,实部为1,虚部为0。
→ g r a v i t y _ v e c t o r _ 初始化时,为 ( 0 , 0 , 1 ) 单位向量 \color{red} →gravity\_vector\_ 初始化时,为(0,0,1)单位向量 →gravity_vector_初始化时,为(0,0,1)单位向量
如果把 o r i e n t a t i o n t i m e i n i t orientation^{init}_{time} orientationtimeinit 与 g r a v i t y _ v e c t o r t i m e _ t i m e gravity\_vector^{time}_{time\_} gravity_vectortime_time 乘起来可以得到如下结果:
{ o r i e n t a t i o n t i m e _ i n i t ∗ r o t a t i o n t i m e t i m e _ } ∗ { [ r o t a t i o n t i m e t i m e _ ] − 1 ∗ g r a v i t y _ v e c t o r t i m e _ i n i t } (03) \color{Green} \tag{03} \{orientation^{init}_{time\_} * rotation^{time\_}_{time}\}*\{[rotation^{time\_}_{time}]^{-1}*gravity\_vector^{init}_{time\_}\} {orientationtime_init∗rotationtimetime_}∗{[rotationtimetime_]−1∗gravity_vectortime_init}(03)上式等价于 o r i e n t a t i o n t i m e _ i n i t ∗ g r a v i t y _ v e c t o r t i m e _ i n i t = ( 1 , 0 , 0 , 0 ) ∗ ( 0 , 0 , 1 ) = ( 0 , 0 , 1 ) (04) \color{Green} \tag{04} orientation^{init}_{time\_}*gravity\_vector^{init}_{time\_}=(1,0,0,0)*(0,0,1)=(0,0,1) orientationtime_init∗gravity_vectortime_init=(1,0,0,0)∗(0,0,1)=(0,0,1)(04) 也就是说,ImuTracker 在不停更新 orientation_ 与 gravity_vector_ 过程中,他们的乘以应一直保持单位向量(0,0,1)。
四、ImuTracker::AddImuLinearAccelerationObservation()→代码流程
该函数稍微复杂一点,不过没有关系:
( 1 ) \color{blue}(1) (1) 调用该函数,需要传入一个三维的 Imu 线性加速度 imu_linear_acceleration,这里很有可能就是传入 Imu 测量到的数据,也可以理解为每个时刻 Imu 的位姿,注意这里的是加速度,不是角速度,也不是角加速度。
( 2 ) \color{blue}(2) (2) 在前面 ImuTracker::Advance() 函数中,会对变量 time_ 进行更新。因为构造函数初始化 last_linear_acceleration_time_ 变量是就是 common::Time::min(),如果 last_linear_acceleration_time_ > common::Time::min() 成立,说明 last_linear_acceleration_time_ 被更新过了,那么技计算 time_ 与 last_linear_acceleration_time_ 的差值给 delta_t,否则返回一个 double 类型的最大值给 delta_t。同时把 time_ 赋值给 last_linear_acceleration_time_。
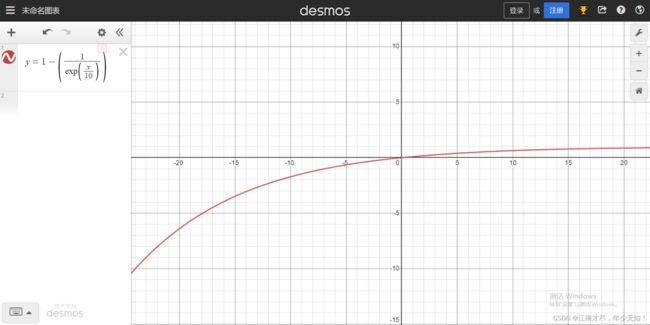
( 3 ) \color{blue}(3) (3) 求权重 alpha,其与 delta_t 相关,公式为 a l p h a = 1 − exp ( − d e l t a _ t / 10 ) ⟹ α = 1 − e x p ( − δ t / 10 ) alpha =1-\exp ^{(-delta\_t/10)} ~~~~~~~~\Longrightarrow ~~~~~~ \alpha=1-exp(-\delta t/10) alpha=1−exp(−delta_t/10) ⟹ α=1−exp(−δt/10)从公式可以看出,delta_t 越大,alpha 越大,但是 alpha最大 为1,代码如下:
// Step: 2 求alpha, alpha=1-e^(-delta_t/10)
// delta_t越大, alpha越大
const double alpha = 1. - std::exp(-delta_t / imu_gravity_time_constant_);
也就是说,单第一次 last_linear_acceleration_time_ 没有被更新过,alpha 接近1。alpha 还与 imu_gravity_time_constant_ 参数相关。本人利用软件绘画了一下该函数的图示(https://www.desmos.com/calculator?lang=zh-CN):
( 4 ) \color{blue}(4) (4) 使用 alpha 来确定权重,代码如下:
// 指数来确定权重, 因为有噪声的存在, 时间差越大, 当前的线性加速度的权重越大
// 这里的gravity_vector_改成线性加速度更清晰一些
gravity_vector_ =
(1. - alpha) * gravity_vector_ + alpha * imu_linear_acceleration;
结合(3)总的来说,当时间差 delta_t 比较下,则相信历史记录的 gravity_vector_,如果 delta_t 比较大,则相信新传入的 Imu 位姿 imu_linear_acceleration。总的来说,这里通过外部传入,或者说观测到 imu_linear_acceleration 数据,对 gravity_vector_ 进行更新(由上一次更新到当前),从这里可以看出来,gravity_vector_ 与 imu_linear_acceleration 联系十分紧密。
( 5 ) \color{blue}(5) (5) 对 gravity_vector_ 更新之后,就是要对 orientation_ 进行更新了,前面提到过他们的乘积永远需要保持在 (0,0,1) 左右。要对 orientation_ 进行更新,那么肯定需要算出当前的 gravity_vector_ 与 上一次的 gravity_vector_ 的旋转变换量。上一次机器人的位姿为 orientation_ 记为 o r i e n t a t i o n t i m e _ i n i t orientation^{init}_{time\_} orientationtime_init,使用他的逆乘初始值(0,0,1)向量,那么可以得到 gravity_vector_ 上一时刻的加速度,代码如下
orientation_.conjugate() * Eigen::Vector3d::UnitZ() //就表示 gravity_vector_ 上一次的位姿。
( 6 ) \color{blue}(6) (6) 接着调用了 Eigen 中的 Quaternion
// Change the 'orientation_' so that it agrees with the current
// 'gravity_vector_'.
// Step: 4 求得 线性加速度的值 与 由上一时刻姿态求出的线性加速度 间的旋转量
const Eigen::Quaterniond rotation = FromTwoVectors(
gravity_vector_, orientation_.conjugate() * Eigen::Vector3d::UnitZ());
求解的就是当前次 gravity_vector_ 到上一次 gravity_vector_ 的角速度变换量(四元数表示)。
( 7 ) \color{blue}(7) (7) 步骤(6)求解出来的 rotation 是 gravity_vector_ 到上一次 gravity_vector_ 的旋转,那么其为正方向(逆时针)的旋转变化,orientation_ 与其相乘,然后再赋值给 orientation_,相当于对 orientation_。进行了更新。
( 8 ) \color{blue}(8) (8) 通过如下函数,对 orientation_ 与 gravity_vector_ 进行校验:
// note: glog CHECK_GT: 第一个参数要大于第二个参数
// 如果线性加速度与姿态均计算完全正确,那这二者的乘积应该是 0 0 1
CHECK_GT((orientation_ * gravity_vector_).z(), 0.);
CHECK_GT((orientation_ * gravity_vector_).normalized().z(), 0.99);
四、ImuTracker::AddImuLinearAccelerationObservation()→代码注释
关于 ImuTracker::AddImuLinearAccelerationObservation() 函数的注释如下:
/**
* @brief 更新线性加速度的值,并根据重力的方向对上一时刻的姿态进行校准
*
* @param[in] imu_linear_acceleration imu的线加速度的大小
*/
void ImuTracker::AddImuLinearAccelerationObservation(
const Eigen::Vector3d& imu_linear_acceleration) {
// Update the 'gravity_vector_' with an exponential moving average using the
// 'imu_gravity_time_constant'.
// 指数滑动平均法 exponential moving average
// Step: 1 求delta_t, delta_t初始时刻为infinity, 之后为time_-last_linear_acceleration_time_
const double delta_t =
last_linear_acceleration_time_ > common::Time::min()
? common::ToSeconds(time_ - last_linear_acceleration_time_)
: std::numeric_limits<double>::infinity();
last_linear_acceleration_time_ = time_;
// Step: 2 求alpha, alpha=1-e^(-delta_t/10)
// delta_t越大, alpha越大
const double alpha = 1. - std::exp(-delta_t / imu_gravity_time_constant_);
// Step: 3 将之前的线加速度与当前传入的线加速度进行融合, 这里采用指数滑动平均法
// 指数来确定权重, 因为有噪声的存在, 时间差越大, 当前的线性加速度的权重越大
// 这里的gravity_vector_改成线性加速度更清晰一些
gravity_vector_ =
(1. - alpha) * gravity_vector_ + alpha * imu_linear_acceleration;
// Change the 'orientation_' so that it agrees with the current
// 'gravity_vector_'.
// Step: 4 求得 线性加速度的值 与 由上一时刻姿态求出的线性加速度 间的旋转量
const Eigen::Quaterniond rotation = FromTwoVectors(
gravity_vector_, orientation_.conjugate() * Eigen::Vector3d::UnitZ());
// Step: 5 使用这个旋转量来校准当前的姿态
orientation_ = (orientation_ * rotation).normalized();
// note: glog CHECK_GT: 第一个参数要大于第二个参数
// 如果线性加速度与姿态均计算完全正确,那这二者的乘积应该是 0 0 1
CHECK_GT((orientation_ * gravity_vector_).z(), 0.);
CHECK_GT((orientation_ * gravity_vector_).normalized().z(), 0.99);
}
五、ImuTracker::AddImuAngularVelocityObservation
该函数比较简单,添加Imu测量到的加速度:
// 更新角速度
void ImuTracker::AddImuAngularVelocityObservation(
const Eigen::Vector3d& imu_angular_velocity) {
imu_angular_velocity_ = imu_angular_velocity;
}
六、ImuTracker 总体复盘
通过上面的分析,下面来做一个总结:
( 1 ) \color{blue}(1) (1) 总体来说, ImuTracker 的作用应该是根据之前的 Imu 数据推断出指定 time 时刻位姿(可以早于当前时刻),调用 ImuTracker::orientation() 函数查询。构造函数:orientation_ 初始化为→实部为1,虚部为0;gravity_vector_ 初始化为→(0,0,1)单位向量;
( 2 ) \color{blue}(2) (2) 预测时先调用 ImuTracker::Advance(const common::Time time) 函数,该函数会利用存储的最新角速度 imu_angular_velocity_ 对 orientation_ 与 gravity_vector_ 进行更新。注意 orientation_ 逆时针更新,gravity_vector_ 顺时针更新。更新之后,所以把 time_ 刷新,赋值成 time。可以知道,该函数更新只使用到了最新的角速度 imu_angular_velocity_ 。
( 3 ) \color{blue}(3) (3) 那么最新的角速度从哪里来,Imu的线性加速度又有什么作用?其 ImuTracker 内部又是如何工作的呢?想要 ImuTracker 正常的工作起来,需要不停的调用如下函数:
//添加观测到的,或者说通过Imu测量到的线性加速度。
void ImuTracker::AddImuLinearAccelerationObservation(const Eigen::Vector3d&imu_linear_acceleration)
//添加观测到的。或者说通过Imu测量到的角速度。
void ImuTracker::AddImuAngularVelocityObservation(const Eigen::Vector3d& imu_angular_velocity)
( 4 ) \color{blue}(4) (4) AddImuLinearAccelerationObservation():该函时数添Imu测量的线性加速度,本质上是利用线性加速度对 gravity_vector_ 与 orientation_ 进行校准。 核心理解 \color{red} 核心理解 核心理解→ImuTracker::Advance 函数进行位姿推断的时候,会对 orientation_、gravity_vector_ 进行更新,长时间不进行校准,或导致 orientation_、gravity_vector_ 发生漂移。
( 5 ) \color{blue}(5) (5) AddImuLinearAccelerationObservation():该函数对于 gravity_vector_ 的更新不太好理解,首先就是使用了一个时间指数平滑平均。时间差越大,历史的 gravity_vector_ 权重就越小。举例:长时间没有获取到可用的 Imu 线速度,那么之前的历史 gravity_vector_ 也就没有太大参考价值了。
( 6 ) \color{blue}(6) (6) AddImuLinearAccelerationObservation():该函数 gravity_vector_ 的更新,实际上就 Imu 传感器获得的线性加速度的更新。该更新没有只依靠变量 imu_linear_acceleration。
( 7 ) \color{blue}(7) (7) AddImuLinearAccelerationObservation():该函数是利用 imu_linear_acceleration 数据,对 orientation_(姿态进行校准)
七、结语
ImuTracker 这个类主要的作用,是可以输入一个时间 time,然后预测出该时间点的姿态 orientation_。其预测的原理,是利用上一时刻 Imu 的角速度。另外还会利用 Imu 的线性加速度对最新的 orientation_ 进行校正。
这里很明显存在一个局限性,那就是校正使用 Imu 的线性加速度,其只有在物体慢速或者匀速的状态下,才能起到较好的作用,且按原理来说,ImuTracker 初始化必须处于静止状态。可以参考一下 Imu 的预积分,其可以解决该问题,也算对 Cartographer 优化的一个方向。参考论文:
论文:D-LIOM: Tightly-coupled Direct LiDAR-Inertial Odometry and Mapping
源码:https://github.com/peterWon/D-LIOM
贡献(Imu方面):D-LIOM支持与6轴IMU配合的传感器配置初始化,不论机器人载体是静态或运动状态,都可以完成imu的初始化功能并使得估计状态与重力对齐。D-LIOM前端还可以利用imu预积分的功能完成多激光雷达输入和点云去畸变。