#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
class canny
{
public:
Mat src;
// 高斯滤波算子
double** guassArray(int size, double sigma);
// 高斯滤波
Mat guassFilter(Mat& src,int size,double sigma);
// 像素判定
uchar pixelJudge(double pixel);
// sobel梯度计算:梯度方向与边缘方向垂直
Mat sobel(Mat& src);
// 非极大值抑制(NMS)
/*
非极大值抑制是一种将宽边缘带细化,只保留边缘峰值的处理。主要的手法是根据上一步获取
的梯度方向,将图像像素点沿梯度方向或逆方向的邻域像素点进行比较,如果为最大值则保留,
否则抑制,即设置像素点为0。
*/
Mat NMS(Mat& src);
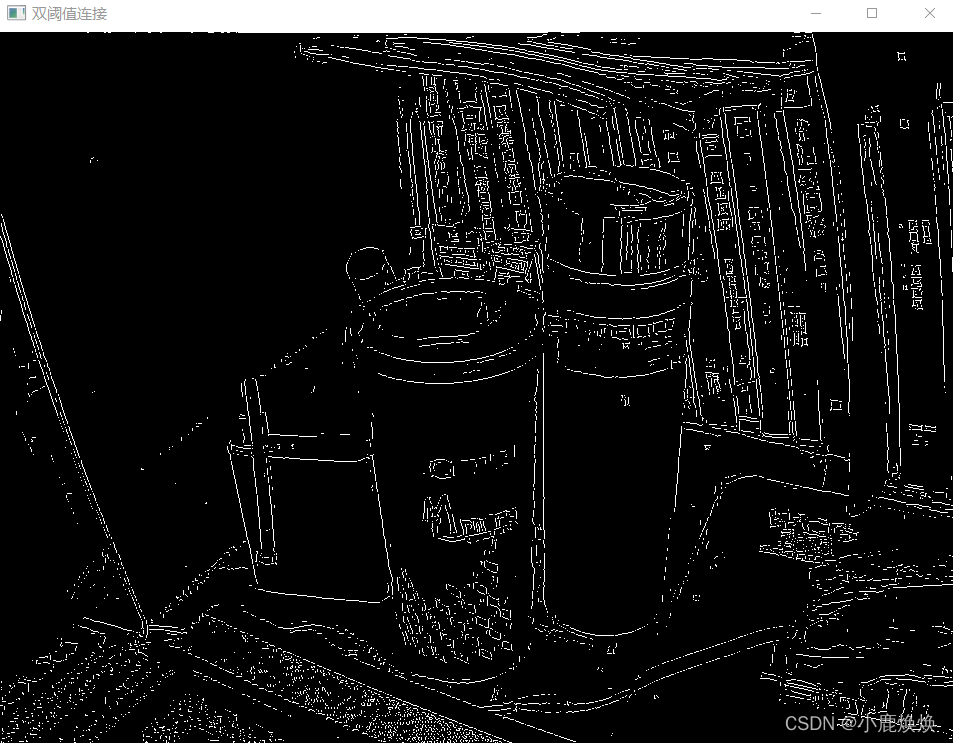
/*双阈值连接
设置两个阈值,一个高阈值和一个低阈值。图像像素点如果高于高阈值则表示是强边缘点,是
真实边缘点,高于低阈值但小于高阈值表示是弱边缘点,其它不是边缘,抑制。之后需要对弱
边缘点进行处理,若其邻域存在强边缘点则表示是真实边缘点,否则不是。这样设置两个阈值
可以滤除图像中噪声,改善图像质量。弱边缘的处理原则是因为真实边缘的弱边缘点都存在强边缘点。
*/
Mat doubleThresh(Mat& src, uchar high, uchar low);
//测试
Mat cannyTest(Mat& src, int size, double sigma, uchar high, uchar low);
};
Mat canny::cannyTest(Mat& src, int size, double sigma, uchar high, uchar low)
{
Mat dst = guassFilter(src, size, sigma);
Mat edge = sobel(dst);
edge = NMS(edge);
vector grade;
split(edge, grade);
imshow("最大值抑制", grade[0]);
edge = doubleThresh(edge, 30, 100);
imshow("双阈值连接", edge);
return edge;
}
uchar canny::pixelJudge(double pixel)
{
if (pixel < 0)
{
return 0;
}
else if (pixel > 255)
{
return 255;
}
else
{
return static_cast(pixel);
}
}
double** canny::guassArray(int size, double sigma)
{
// [1] 初始化权值数组
double** array = new double* [size];
for (int i = 0; i < size; i++) {
array[i] = new double[size];
}
// [2] 高斯分布计算
int center_i, center_j;
center_i = center_j = size / 2;
double pi = M_PI;
double sum = 0;
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
array[i][j] =
//后面进行归一化,这部分可以不用
//0.5f *pi*(sigma*sigma) *
exp(-(1.0f) * (((i - center_i) * (i - center_i) + (j - center_j) * (j - center_j)) /
(2.0f * sigma * sigma)));
sum += array[i][j];
//cout << array[i][j] << endl;
}
}
// [2-2] 归一化求权值
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
array[i][j] /= sum;
//cout << array[i][j] << " ";
}
}
return array;
};
Mat canny::guassFilter(Mat& src, int size, double sigma)
{
Mat dst = src.clone();
double** array = guassArray(size, sigma);
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
double sum = 0;
for (int m = -size / 2; m <= size / 2; m++)
{
for (int n = -size / 2; n <= size / 2; n++)
{
// 边缘补零
if (i + m < 0 || i + m >= src.rows || j + n < 0 || j + n >= src.cols)
{
sum += 0;
}
else
{
sum += src.at(i + m, j + n)*array[m+size/2][n+size/2];
}
}
}
dst.at(i, j) = pixelJudge(sum);
}
}
return dst;
}
Mat canny::sobel(Mat& src)
{
Mat gradeValue = src.clone();
Mat gradeDirect = src.clone();
// x方向边缘的y模板
double model1[9] = { -1, -2, -1, 0, 0, 0, 1, 2, 1 };
// y方向边缘的x模板
double model2[9] = { -1, 0, 1, -2, 0, 2, -1, 0, 1 };
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
int p = 0;
double sum_x = 0;
double sum_y = 0;
for (int m = -1; m <= 1; m++)
{
for (int n = -1; n <= 1; n++)
{
// 边缘补零
if (i + m < 0 || i + m >= src.rows || j + n < 0 || j + n >= src.cols)
{
p++;
}
else
{
sum_y += src.at(i + m, j + n) * model1[p];
sum_x += src.at(i + m, j + n) * model2[p];
p++;
}
}
}
gradeValue.at(i, j) = pixelJudge(pow(pow(sum_x, 2) + pow(sum_y, 2), 1.0 / 2));
// 0,7垂直方向, 1,2斜对角方向\, 3,4水平方向, 5,6斜对角方向/
// 梯度方向与边缘垂直,因此model1检测出横向边缘,梯度方向为竖向
// 同理model2检测出竖向边缘,梯度方向为横向,因此梯度方向为y/x
//arctanx的范围是-pi/2到pi/2
gradeDirect.at(i, j) = static_cast(atan(sum_y / (sum_x + 0.001)) * 8 / CV_PI + 4);
//cout << (int)gradeDirect.at(i, j) << endl;
}
}
Mat temp[] = { gradeValue, gradeDirect };
Mat grad;
// 将梯度幅值与梯度方向合并,通道数为2,类似RGB通道
// 但是不能显示,因为只能显示通道数1、3、4的图像
// Mat dst1 = Mat::zeros(src.rows, src.cols * 2, CV_8UC2);
// imshow(dst1);
merge(temp, 2, grad);
//对多通道像素进行访问
//int num = 0;
//for (int i = 0; i <=0; i++)
//{
// for (int j = 0; j <= 1; j++)
// {
// cout << (int)grad.at(i, j)[0] << endl;
// cout << (int)grad.at(i, j)[1] << endl;
// }
//}
//显示梯度图
//imshow("edge", gradeValue);
return grad;
}
Mat canny::NMS(Mat& src)
{
// 梯度通道和方向通道
vector grad;
split(src, grad);
Mat gradValue = grad[0].clone();
//imshow("edge", grade[0]);
for (int i = 0; i < gradValue.rows; i++)
for (int j = 0; j < gradValue.cols; j++)
{
//将宽边缘带细化:对于梯度方向是垂直方向,边缘是水平方向,想要细化边缘,就要比较上下gradValue
//梯度方向是垂直方向,比较上下gradValue
if (grad[1].at(i, j) == 0 || grad[1].at(i, j) == 7)
{
if (i < gradValue.rows - 1)
if (gradValue.at(i, j) <= gradValue.at(i + 1, j))
{
grad[0].at(i, j) = 0;
continue;
}
if (i > 0)
if (gradValue.at(i, j) <= gradValue.at(i - 1, j))
{
grad[0].at(i, j) = 0;
continue;
}
}
//梯度方向是“\”方向,比较对角gradValue
if (grad[1].at(i, j) == 1 || grad[1].at(i, j) == 2)
{
if (i < gradValue.rows - 1 && j < gradValue.cols - 1)
if (gradValue.at(i, j) <= gradValue.at(i + 1, j + 1))
{
grad[0].at(i, j) = 0;
continue;
}
if (i > 0 && j > 0)
if (gradValue.at(i, j) <= gradValue.at(i - 1, j - 1))
{
grad[0].at(i, j) = 0;
continue;
}
}
//梯度方向是水平方向,比较左右gradValue
if (grad[1].at(i, j) == 3 || grad[1].at(i, j) == 4)
{
if (j < gradValue.cols - 1)
if (gradValue.at(i, j) <= gradValue.at(i, j + 1))
{
grad[0].at(i, j) = 0;
continue;
}
if (j > 0)
if (gradValue.at(i, j) <= gradValue.at(i, j - 1))
{
grad[0].at(i, j) = 0;
continue;
}
}
//梯度方向是“/”方向,比较对角gradValue
if (grad[1].at(i, j) == 5 || grad[1].at(i, j) == 6)
{
if (i < gradValue.rows - 1 && j > 0)
if (gradValue.at(i, j) <= gradValue.at(i + 1, j - 1))
{
grad[0].at(i, j) = 0;
continue;
}
if (i > 0 && j < gradValue.cols - 1)
if (gradValue.at(i, j) <= gradValue.at(i - 1, j + 1))
{
grad[0].at(i, j) = 0;
continue;
}
}
}
//imshow("非极大值处理", grad[0]);
merge(grad, src);
return src;
}
Mat canny::doubleThresh(Mat& src, uchar high, uchar low)
{
vector grad;
// 梯度通道和方向通道
split(src, grad);
for (int i = 0; i < grad[0].rows; i++)
for (int j = 0; j < grad[0].cols; j++)
{
if (grad[0].at(i, j) > high)
{
grad[0].at(i, j) = 255;
// 标记强边缘点的位置
grad[1].at(i, j) = 2;
}
else if (grad[0].at(i, j) > low)
{
grad[0].at(i, j) = 0;
// 标记弱边缘点的位置
grad[1].at(i, j) = 1;
}
else
{
grad[0].at(i, j) = 0;
grad[1].at(i, j) = 0;
}
}
// 真实的边缘会在弱边缘点的邻域内存在强边缘点
for (int i = 0; i < grad[0].rows; i++)
for (int j = 0; j < grad[0].cols; j++)
{
if (grad[1].at(i, j) == 1)
{
for (int n = -1; n <= 1; n++)
for (int m = -1; m <= 1; m++)
{
if (i + n >= 0 && j + m >= 0 && i + n < src.rows && j + m < src.cols && grad[1].at(i + n, j + m) == 2)
grad[0].at(i, j) = 255;
}
}
}
return grad[0];
}
int main()
{
Mat imgLeft = imread("D:\\VC\\c++\\opencv源码\\opencv源码\\Stereo_Sample\\ImageL1.jpg", IMREAD_GRAYSCALE);
canny c;
c.src = imgLeft;
c.cannyTest(c.src, 5, 1, 40, 100);
cv::waitKey(0);
return 0;
}