NLP自然语言处理学习笔记(六)(转自咕泡AI)
循环神经网络
目标
- 能够说出循环神经网络的概念和作用
- 能够说出循环神经网络的类型和应用场景
- 能够说出LSTM的作用和原理
- 能够说出GRU的作用和原理
1. 循环神经网络的介绍
为什么有了神经网络还需要有循环神经网络?
在普通的神经网络中,信息的传递是单向的,这种限制虽然使得网络变得更容易学习,但在一定程度上也减弱了神经网络模型的能力。特别是在很多现实任务中,网络的输出不仅和当前时刻的输入相关,也和其过去一段时间的输出相关。此外,普通网络难以处理时序数据,比如视频、语音、文本等,时序数据的长度一般是不固定的,而前馈神经网络要求输入和输出的维数都是固定的,不能任意改变。因此,当处理这一类和时序相关的问题时,就需要一种能力更强的模型。
循环神经网络(Recurrent Neural Network,RNN)是一类具有短期记忆能力的神经网络。在循环神经网络中,神经元不但可以接受其它神经元的信息,也可以接受自身的信息,形成具有环路的网络结构。换句话说:神经元的输出可以在下一个时间步直接作用到自身(入)
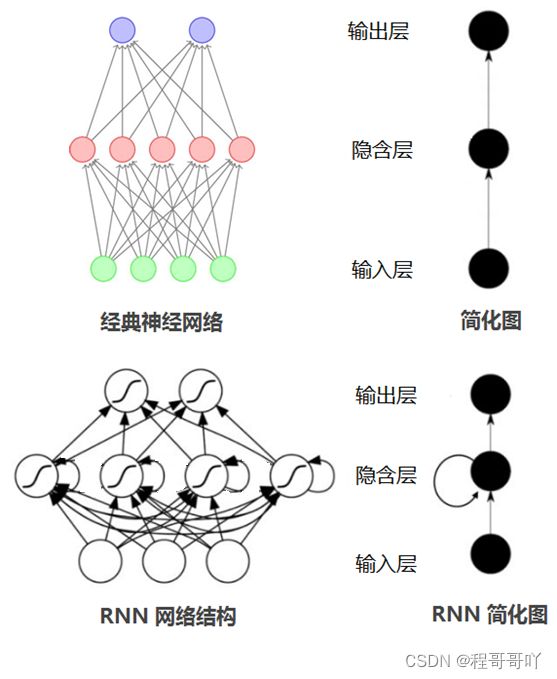
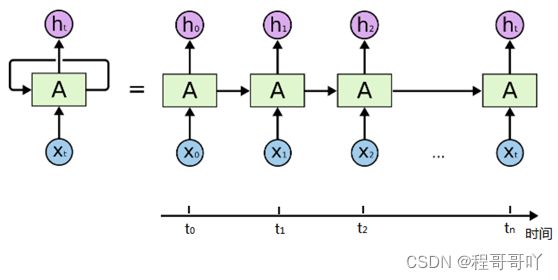
通过简化图,我们看到RNN比传统的神经网络多了一个循环圈,这个循环表示的就是在下一个时间步(Time Step)上会返回作为输入的一部分,我们把RNN在时间点上展开,得到的图形如下:
或者是:
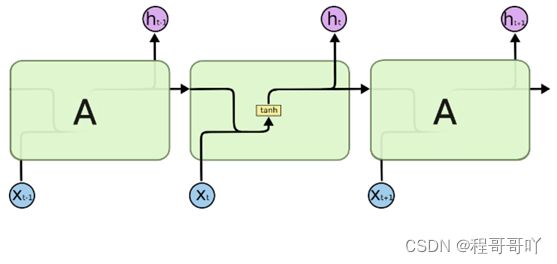
在不同的时间步,RNN的输入都将与之前的时间状态有关, t n t_n tn时刻网络的输出结果是该时刻的输入和所有历史共同作用的结果,这就达到了对时间序列建模的目的。
RNN的不同表示和功能可以通过下图看出:
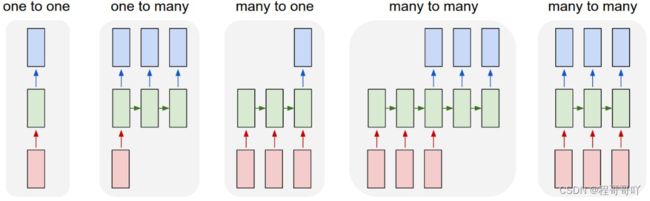
- 图1:固定长度的输入和输出 (e.g. 图像分类)
- 图2:序列输出 (e.g.图像转文字)
- 图3:数列输入 (e.g. 文本分类)
- 图4:异步的序列输入和输出(e.g.文本翻译).
- 图5:同步的序列输入和输出 (e.g. 根据视频的每一帧来对视频进行分类)
2. LSTM和GRU
2.1 LSTM的基础介绍
假如现在有这样一个需求,根据现有文本预测下一个词语,比如天上的云朵漂浮在__,通过间隔不远的位置就可以预测出来词语是天上,但是对于其他一些句子,可能需要被预测的词语在前100个词语之前,那么此时由于间隔非常大,随着间隔的增加可能会导致真实的预测值对结果的影响变的非常小,而无法非常好的进行预测(RNN中的长期依赖问题(long-Term Dependencies))
那么为了解决这个问题需要LSTM(Long Short-Term Memory网络)
LSTM是一种RNN特殊的类型,可以学习长期依赖信息。在很多问题上,LSTM都取得相当巨大的成功,并得到了广泛的应用。
一个LSMT的单元就是下图中的一个绿色方框中的内容:
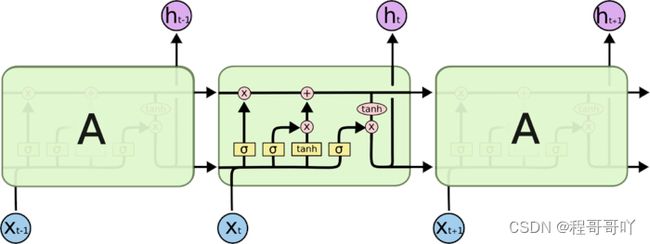
其中 σ \sigma σ表示sigmod函数,其他符号的含义:

2.2 LSTM的核心
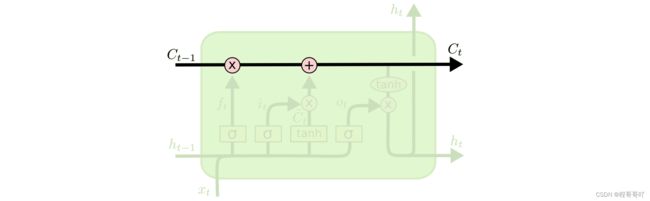
LSTM的核心在于单元(细胞)中的状态,也就是上图中最上面的那根线。
但是如果只有上面那一条线,那么没有办法实现信息的增加或者删除,所以在LSTM是通过一个叫做门的结构实现,门可以选择让信息通过或者不通过。
这个门主要是通过sigmoid和点乘(pointwise multiplication)实现的

我们都知道, s i g m o i d sigmoid sigmoid的取值范围是在(0,1)之间,如果接近0表示不让任何信息通过,如果接近1表示所有的信息都会通过
2.3 逐步理解LSTM
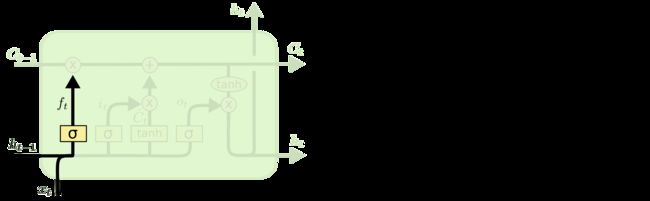
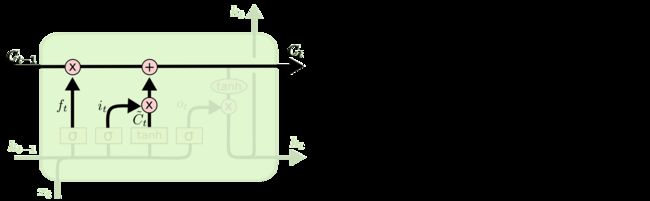
2.3.1 遗忘门
遗忘门通过sigmoid函数来决定哪些信息会被遗忘
在下图就是 h t − 1 和 x t h_{t-1}和x_t ht−1和xt进行合并(concat)之后乘上权重和偏置,通过sigmoid函数,输出0-1之间的一个值,这个值会和前一次的细胞状态( C t − 1 C_{t-1} Ct−1)进行点乘,从而决定遗忘或者保留
2.3.2 输入门
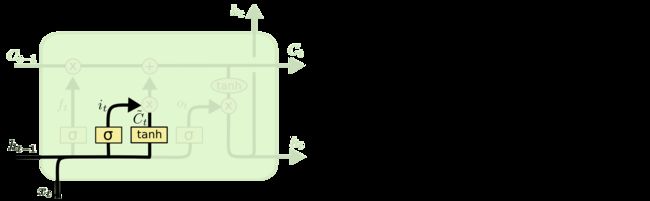
下一步就是决定哪些新的信息会被保留,这个过程有两步:
- 一个被称为
输入门的sigmoid 层决定哪些信息会被更新 tanh会创造一个新的候选向量 C ~ t \widetilde{C}_{t} C t,后续可能会被添加到细胞状态中
例如:
我昨天吃了苹果,今天我想吃菠萝,在这个句子中,通过遗忘门可以遗忘苹果,同时更新新的主语为菠萝
现在就可以更新旧的细胞状态 C t − 1 C_{t-1} Ct−1为新的 C t C_{ t } Ct 了。
更新的构成很简单就是:
- 旧的细胞状态和遗忘门的结果相乘
- 然后加上 输入门和tanh相乘的结果
2.3.3 输出门
最后,我们需要决定什么信息会被输出,也是一样这个输出经过变换之后会通过sigmoid函数的结果来决定那些细胞状态会被输出。
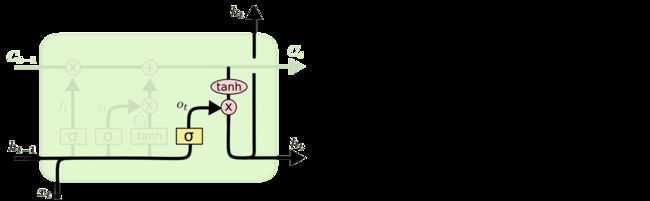
步骤如下:
- 前一次的输出和当前时间步的输入的组合结果通过sigmoid函数进行处理得到 O t O_t Ot
- 更新后的细胞状态 C t C_t Ct会经过tanh层的处理,把数据转化到(-1,1)的区间
- tanh处理后的结果和 O t O_t Ot进行相乘,把结果输出同时传到下一个LSTM的单元
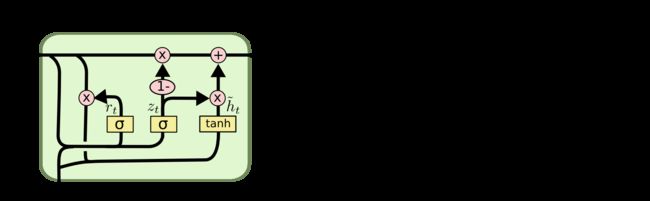
2.4 GRU,LSTM的变形
GRU(Gated Recurrent Unit),是一种LSTM的变形版本, 它将遗忘和输入门组合成一个“更新门”。它还合并了单元状态和隐藏状态,并进行了一些其他更改,由于他的模型比标准LSTM模型简单,所以越来越受欢迎。
LSTM内容参考地址:https://colah.github.io/posts/2015-08-Understanding-LSTMs/
3. 双向LSTM
单向的 RNN,是根据前面的信息推出后面的,但有时候只看前面的词是不够的, 可能需要预测的词语和后面的内容也相关,那么此时需要一种机制,能够让模型不仅能够从前往后的具有记忆,还需要从后往前需要记忆。此时双向LSTM就可以帮助我们解决这个问题
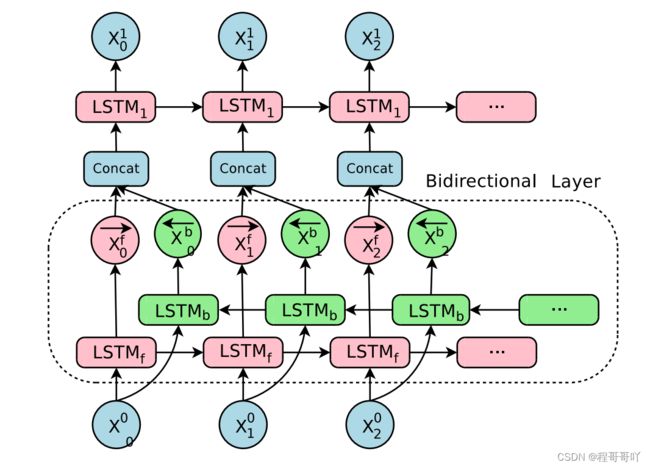
由于是双向LSTM,所以每个方向的LSTM都会有一个输出,最终的输出会有2部分,所以往往需要concat的操作
循环神经网络实现文本情感分类
目标
- 知道LSTM和GRU的使用方法及输入输出的格式
- 能够应用LSTM和GRU实现文本情感分类
1. Pytorch中LSTM和GRU模块使用
1.1 LSTM介绍
LSTM和GRU都是由torch.nn提供
通过观察文档,可知LSMT的参数,
torch.nn.LSTM(input_size,hidden_size,num_layers,batch_first,dropout,bidirectional)
input_size:输入数据的形状,即embedding_dimhidden_size:隐藏层神经元的数量,即每一层有多少个LSTM单元num_layer:即RNN的中LSTM单元的层数batch_first:默认值为False,输入的数据需要[seq_len,batch,feature],如果为True,则为[batch,seq_len,feature]dropout:dropout的比例,默认值为0。dropout是一种训练过程中让部分参数随机失活的一种方式,能够提高训练速度,同时能够解决过拟合的问题。这里是在LSTM的最后一层,对每个输出进行dropoutbidirectional:是否使用双向LSTM,默认是False
实例化LSTM对象之后,不仅需要传入数据,还需要前一次的h_0(前一次的隐藏状态)和c_0(前一次memory)
即:lstm(input,(h_0,c_0))
LSTM的默认输出为output, (h_n, c_n)
output:(seq_len, batch, num_directions * hidden_size)—>batch_first=Falseh_n:(num_layers * num_directions, batch, hidden_size)c_n:(num_layers * num_directions, batch, hidden_size)
1.2 LSTM使用示例
假设数据输入为 input ,形状是[10,20],假设embedding的形状是[100,30]
则LSTM使用示例如下:
batch_size =10
seq_len = 20
embedding_dim = 30
word_vocab = 100
hidden_size = 18
num_layer = 2
#准备输入数据
input = torch.randint(low=0,high=100,size=(batch_size,seq_len))
#准备embedding
embedding = torch.nn.Embedding(word_vocab,embedding_dim)
lstm = torch.nn.LSTM(embedding_dim,hidden_size,num_layer)
#进行mebed操作
embed = embedding(input) #[10,20,30]
#转化数据为batch_first=False
embed = embed.permute(1,0,2) #[20,10,30]
#初始化状态, 如果不初始化,torch默认初始值为全0
h_0 = torch.rand(num_layer,batch_size,hidden_size)
c_0 = torch.rand(num_layer,batch_size,hidden_size)
output,(h_1,c_1) = lstm(embed,(h_0,c_0))
#output [20,10,1*18]
#h_1 [2,10,18]
#c_1 [2,10,18]
输出如下
In [122]: output.size()
Out[122]: torch.Size([20, 10, 18])
In [123]: h_1.size()
Out[123]: torch.Size([2, 10, 18])
In [124]: c_1.size()
Out[124]: torch.Size([2, 10, 18])
通过前面的学习,我们知道,最后一次的h_1应该和output的最后一个time step的输出是一样的
通过下面的代码,我们来验证一下:
In [179]: a = output[-1,:,:]
In [180]: a.size()
Out[180]: torch.Size([10, 18])
In [183]: b.size()
Out[183]: torch.Size([10, 18])
In [184]: a == b
Out[184]:
tensor([[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]],
dtype=torch.uint8)
1.3 GRU的使用示例
GRU模块torch.nn.GRU,和LSTM的参数相同,含义相同,具体可参考文档
但是输入只剩下gru(input,h_0),输出为output, h_n
其形状为:
output:(seq_len, batch, num_directions * hidden_size)h_n:(num_layers * num_directions, batch, hidden_size)
大家可以使用上述代码,观察GRU的输出形式
1.4 双向LSTM
如果需要使用双向LSTM,则在实例化LSTM的过程中,需要把LSTM中的bidriectional设置为True,同时h_0和c_0使用num_layer*2
观察效果,输出为
batch_size =10 #句子的数量
seq_len = 20 #每个句子的长度
embedding_dim = 30 #每个词语使用多长的向量表示
word_vocab = 100 #词典中词语的总数
hidden_size = 18 #隐层中lstm的个数
num_layer = 2 #多少个隐藏层
input = torch.randint(low=0,high=100,size=(batch_size,seq_len))
embedding = torch.nn.Embedding(word_vocab,embedding_dim)
lstm = torch.nn.LSTM(embedding_dim,hidden_size,num_layer,bidirectional=True)
embed = embedding(input) #[10,20,30]
#转化数据为batch_first=False
embed = embed.permute(1,0,2) #[20,10,30]
h_0 = torch.rand(num_layer*2,batch_size,hidden_size)
c_0 = torch.rand(num_layer*2,batch_size,hidden_size)
output,(h_1,c_1) = lstm(embed,(h_0,c_0))
In [135]: output.size()
Out[135]: torch.Size([20, 10, 36])
In [136]: h_1.size()
Out[136]: torch.Size([4, 10, 18])
In [137]: c_1.size()
Out[137]: torch.Size([4, 10, 18])
在单向LSTM中,最后一个time step的输出的前hidden_size个和最后一层隐藏状态h_1的输出相同,那么双向LSTM呢?
双向LSTM中:
output:按照正反计算的结果顺序在第2个维度进行拼接,正向第一个拼接反向的最后一个输出
hidden state:按照得到的结果在第0个维度进行拼接,正向第一个之后接着是反向第一个
-
前向的LSTM中,最后一个time step的输出的前hidden_size个和最后一层向前传播h_1的输出相同
-
示例:
-
#-1是前向LSTM的最后一个,前18是前hidden_size个 In [188]: a = output[-1,:,:18] #前项LSTM中最后一个time step的output In [189]: b = h_1[-2,:,:] #倒数第二个为前向 In [190]: a.size() Out[190]: torch.Size([10, 18]) In [191]: b.size() Out[191]: torch.Size([10, 18]) In [192]: a == b Out[192]: tensor([[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]], dtype=torch.uint8)
-
-
后向LSTM中,最后一个time step的输出的后hidden_size个和最后一层后向传播的h_1的输出相同
-
示例
-
#0 是反向LSTM的最后一个,后18是后hidden_size个 In [196]: c = output[0,:,18:] #后向LSTM中的最后一个输出 In [197]: d = h_1[-1,:,:] #后向LSTM中的最后一个隐藏层状态 In [198]: c == d Out[198]: tensor([[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1]], dtype=torch.uint8)
-
1.4 LSTM和GRU的使用注意点
- 第一次调用之前,需要初始化隐藏状态,如果不初始化,默认创建全为0的隐藏状态
- 往往会使用LSTM or GRU 的输出的最后一维的结果,来代表LSTM、GRU对文本处理的结果,其形状为
[batch, num_directions*hidden_size]。- 并不是所有模型都会使用最后一维的结果
- 如果实例化LSTM的过程中,batch_first=False,则
output[-1] or output[-1,:,:]可以获取最后一维 - 如果实例化LSTM的过程中,batch_first=True,则
output[:,-1,:]可以获取最后一维
- 如果结果是
(seq_len, batch_size, num_directions * hidden_size),需要把它转化为(batch_size,seq_len, num_directions * hidden_size)的形状,不能够不是view等变形的方法,需要使用output.permute(1,0,2),即交换0和1轴,实现上述效果 - 使用双向LSTM的时候,往往会分别使用每个方向最后一次的output,作为当前数据经过双向LSTM的结果
- 即:
torch.cat([h_1[-2,:,:],h_1[-1,:,:]],dim=-1) - 最后的表示的size是
[batch_size,hidden_size*2]
- 即:
- 上述内容在GRU中同理
2. 使用LSTM完成文本情感分类
在前面,我们使用了word embedding去实现了toy级别的文本情感分类,那么现在我们在这个模型中添加上LSTM层,观察分类效果。
为了达到更好的效果,对之前的模型做如下修改
- MAX_LEN = 200
- 构建dataset的过程,把数据转化为2分类的问题,pos为1,neg为0,否则25000个样本完成10个类别的划分数据量是不够的
- 在实例化LSTM的时候,使用dropout=0.5,在model.eval()的过程中,dropout自动会为0
2.1 修改模型
class IMDBLstmmodel(nn.Module):
def __init__(self):
super(IMDBLstmmodel,self).__init__()
self.hidden_size = 64
self.embedding_dim = 200
self.num_layer = 2
self.bidriectional = True
self.bi_num = 2 if self.bidriectional else 1
self.dropout = 0.5
#以上部分为超参数,可以自行修改
self.embedding = nn.Embedding(len(ws),self.embedding_dim,padding_idx=ws.PAD) #[N,300]
self.lstm = nn.LSTM(self.embedding_dim,self.hidden_size,self.num_layer,bidirectional=True,dropout=self.dropout)
#使用两个全连接层,中间使用relu激活函数
self.fc = nn.Linear(self.hidden_size*self.bi_num,20)
self.fc2 = nn.Linear(20,2)
def forward(self, x):
x = self.embedding(x)
x = x.permute(1,0,2) #进行轴交换
h_0,c_0 = self.init_hidden_state(x.size(1))
_,(h_n,c_n) = self.lstm(x,(h_0,c_0))
#只要最后一个lstm单元处理的结果,这里多去的hidden state
out = torch.cat([h_n[-2, :, :], h_n[-1, :, :]], dim=-1)
out = self.fc(out)
out = F.relu(out)
out = self.fc2(out)
return F.log_softmax(out,dim=-1)
def init_hidden_state(self,batch_size):
h_0 = torch.rand(self.num_layer * self.bi_num, batch_size, self.hidden_size).to(device)
c_0 = torch.rand(self.num_layer * self.bi_num, batch_size, self.hidden_size).to(device)
return h_0,c_0
2.2 完成训练和测试代码
为了提高程序的运行速度,可以考虑把模型放在gup上运行,那么此时需要处理一下几点:
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")model.to(device)- 除了上述修改外,涉及计算的所有tensor都需要转化为CUDA的tensor
- 初始化的
h_0,c_0 - 训练集和测试集的
input,traget
- 初始化的
- 在最后可以通过
tensor.cpu()转化为torch的普通tensor
train_batch_size = 64
test_batch_size = 5000
# imdb_model = IMDBModel(MAX_LEN) #基础model
imdb_model = IMDBLstmmodel().to(device) #在gpu上运行,提高运行速度
# imdb_model.load_state_dict(torch.load("model/mnist_net.pkl"))
optimizer = optim.Adam(imdb_model.parameters())
criterion = nn.CrossEntropyLoss()
def train(epoch):
mode = True
imdb_model.train(mode)
train_dataloader =get_dataloader(mode,train_batch_size)
for idx,(target,input,input_lenght) in enumerate(train_dataloader):
target = target.to(device)
input = input.to(device)
optimizer.zero_grad()
output = imdb_model(input)
loss = F.nll_loss(output,target) #traget需要是[0,9],不能是[1-10]
loss.backward()
optimizer.step()
if idx %10 == 0:
pred = torch.max(output, dim=-1, keepdim=False)[-1]
acc = pred.eq(target.data).cpu().numpy().mean()*100.
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}\t ACC: {:.6f}'.format(epoch, idx * len(input), len(train_dataloader.dataset),
100. * idx / len(train_dataloader), loss.item(),acc))
torch.save(imdb_model.state_dict(), "model/mnist_net.pkl")
torch.save(optimizer.state_dict(), 'model/mnist_optimizer.pkl')
def test():
mode = False
imdb_model.eval()
test_dataloader = get_dataloader(mode, test_batch_size)
with torch.no_grad():
for idx,(target, input, input_lenght) in enumerate(test_dataloader):
target = target.to(device)
input = input.to(device)
output = imdb_model(input)
test_loss = F.nll_loss(output, target,reduction="mean")
pred = torch.max(output,dim=-1,keepdim=False)[-1]
correct = pred.eq(target.data).sum()
acc = 100. * pred.eq(target.data).cpu().numpy().mean()
print('idx: {} Test set: Avg. loss: {:.4f}, Accuracy: {}/{} ({:.2f}%)\n'.format(idx,test_loss, correct, target.size(0),acc))
if __name__ == "__main__":
test()
for i in range(10):
train(i)
test()
2.3 模型训练的最终输出
...
Train Epoch: 9 [20480/25000 (82%)] Loss: 0.017165 ACC: 100.000000
Train Epoch: 9 [21120/25000 (84%)] Loss: 0.021572 ACC: 98.437500
Train Epoch: 9 [21760/25000 (87%)] Loss: 0.058546 ACC: 98.437500
Train Epoch: 9 [22400/25000 (90%)] Loss: 0.045248 ACC: 98.437500
Train Epoch: 9 [23040/25000 (92%)] Loss: 0.027622 ACC: 98.437500
Train Epoch: 9 [23680/25000 (95%)] Loss: 0.097722 ACC: 95.312500
Train Epoch: 9 [24320/25000 (97%)] Loss: 0.026713 ACC: 98.437500
Train Epoch: 9 [15600/25000 (100%)] Loss: 0.006082 ACC: 100.000000
idx: 0 Test set: Avg. loss: 0.8794, Accuracy: 4053/5000 (81.06%)
idx: 1 Test set: Avg. loss: 0.8791, Accuracy: 4018/5000 (80.36%)
idx: 2 Test set: Avg. loss: 0.8250, Accuracy: 4087/5000 (81.74%)
idx: 3 Test set: Avg. loss: 0.8380, Accuracy: 4074/5000 (81.48%)
idx: 4 Test set: Avg. loss: 0.8696, Accuracy: 4027/5000 (80.54%)
可以看到模型的测试准确率稳定在81%左右。
大家可以把上述代码改为GRU,或者多层LSTM继续尝试,观察效果
Pytorch中的序列化容器
目标
- 知道梯度消失和梯度爆炸的原理和解决方法
- 能够使用
nn.Sequential完成模型的搭建 - 知道
nn.BatchNorm1d的使用方法 - 知道
nn.Dropout的使用方法
1. 梯度消失和梯度爆炸
在使用pytorch中的序列化 容器之前,我们先来了解一下常见的梯度消失和梯度爆炸的问题
1.1 梯度消失
假设我们有四层极简神经网络:每层只有一个神经元
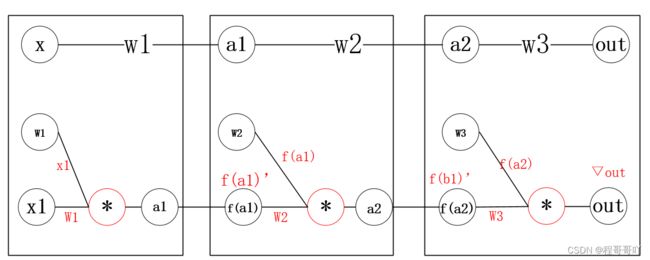
获取 w 1 的梯度有:▽ w 1 = x 1 ∗ f ( a 1 ) ’ ∗ w 2 ∗ f ( b 1 ) ’ ∗ w 3 ∗ ▽ o u t 获取w1的梯度有:▽w1 = x1*f(a1)’*w2*f(b1)’*w3*▽out 获取w1的梯度有:▽w1=x1∗f(a1)’∗w2∗f(b1)’∗w3∗▽out
假设我们使用sigmoid激活函数,即f为sigmoid函数,sigmoid的导数如下图
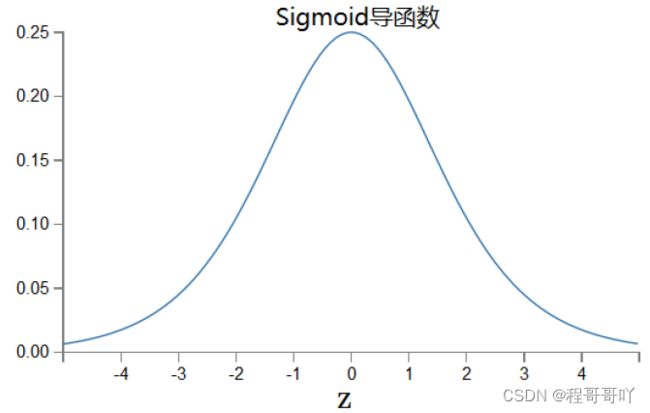
假设每层都取得sigmoid导函数的最大值1/4,那么在反向传播时, X 1 = 0.5 , w 1 = w 2 = w 3 = 0.5 X1=0.5,w1=w2=w3=0.5 X1=0.5,w1=w2=w3=0.5
∇ w 1 < 1 2 ∗ 1 4 ∗ 1 2 ∗ 1 4 ∗ 1 2 ∗ ∇ o u t = 1 2 7 ∇ o u t \nabla w1< \frac{1}{2} * \frac{1}{4}* \frac{1}{2}* \frac{1}{4}*\frac{1}{2}*\nabla out = \frac{1}{2^7} \nabla out ∇w1<21∗41∗21∗41∗21∗∇out=271∇out
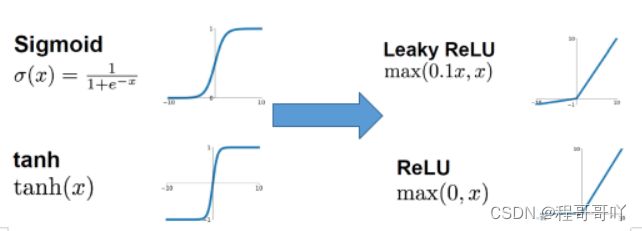
当权重初始过小或使用易饱和神经元(sigmoid,tanh,) sigmoid在y=0,1处梯度接近0,而无法更新参数,时神经网络在反向传播时也会呈现指数倍缩小,产生“消失”现象。
1.2 梯度爆炸
假设 X 2 = 2 , w 1 = w 2 = w 3 = 2 X2=2,w1=w2=w3=2 X2=2,w1=w2=w3=2
$\nabla w1 = f’{a}2f‘{a}*x2\nabla out = 23f’(a)2 \nabla out $
当权重初始过大时,梯度神经网络在反向传播时也会呈现指数倍放大,产生“爆炸”现象。
1.3 解决梯度消失或者梯度爆炸的经验
- 替换易训练神经元
-
**改进梯度优化算法:**使用adam等算法
-
使用batch normalization
2. nn.Sequential
nn.Sequential是一个有序的容器,其中传入的是构造器类(各种用来处理input的类),最终input会被Sequential中的构造器类依次执行
例如:
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True), #inplace=False 是否对输入进行就地修改,默认为False
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.Linear(n_hidden_2, output_dim) # 最后一层不需要添加激活函数
)
在上述就够中,可以直接调用layer(x),得到输出
x的被执行顺序就是Sequential中定义的顺序:
- 被隐层1执行,形状变为[batch_size,n_hidden_1]
- 被relu执行,形状不变
- 被隐层2执行,形状变为[batch_size,n_hidden_2]
- 被relu执行,形状不变
- 被最后一层执行,形状变为[batch_size,output_dim]
3. nn.BatchNorm1d
batch normalization 翻译成中文就是批规范化,即在每个batch训练的过程中,对参数进行归一化的处理,从而达到加快训练速度的效果。
以sigmoid激活函数为例,他在反向传播的过程中,在值为0,1的时候,梯度接近0,导致参数被更新的幅度很小,训练速度慢。但是如果对数据进行归一化之后,就会尽可能的把数据拉倒[0-1]的范围,从而让参数更新的幅度变大,提高训练的速度。
batchNorm一般会放到激活函数之后,即对输入进行激活处理之后再进入batchNorm
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_1)
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_2)
nn.Linear(n_hidden_2, output_dim)
)
4. nn.Dropout
dropout在前面已经介绍过,可以理解为对参数的随机失活
- 增加模型的稳健性
- 可以解决过拟合的问题(增加模型的泛化能力)
- 可以理解为训练后的模型是多个模型的组合之后的结果,类似随机森林。
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_1)
nn.Dropout(0.3) #0.3 为dropout的比例,默认值为0.5
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_2)
nn.Dropout(0.3)
nn.Linear(n_hidden_2, output_dim)
)