opencv学习笔记之图像最值与二值化
文章目录
- 前言
- 一、图像最大值与最小值统计
- 二、图像二值化
-
-
-
- threshold()函数
- adaptiveThreshold()函数
-
-
前言
记录opencv关于求最大值、最小值和二值化的相关函数及操作
一、图像最大值与最小值统计
minMaxLoc()函数
void minMaxLoc(InputArray src, double * minVal, double * maxVal=0, Point * minLoc =0, Point * maxLoc=0, InputArray mask=noArray())
src:需要操作的图像或矩阵,但必须是单通道矩阵
minVal:图像或者矩阵中的最小值
maxVal:图像或者矩阵中的最大值
minLoc:图像或者矩阵中的最小值在矩阵中的坐标
maxLoc:图像或者矩阵中的最大值在矩阵中的坐标
Point数据类型表示图像坐标,以矩阵左上角为坐标原点,水平方向为x轴,垂直方向为y轴,Point(x,y)表示图像的第x行第y列元素
注意minMaxLoc()函数输入参数一定要注意添加取地址符。
示例程序:
#include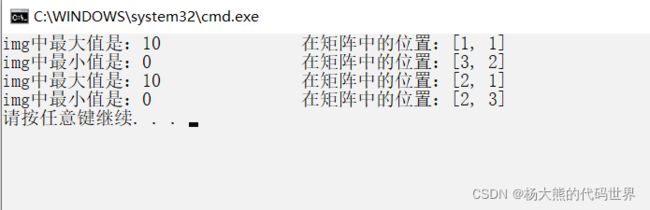
二、图像二值化
在图像中一般像素值为只有两种(最大值和最小值)的图像成为二值图像,二值图像色彩种类少,可以进行高度的压缩,节省存储空间,将非二值图像经过计算变成二值图像的过程称为图像的二值化。OpenCV提供了两种函数用于实现图像的二值化。
threshold()函数
double threshlod(InputArray src, OutpurArray dst, double thresh, double maxval, int type)
src:待二值化的图像,图像只能是CV_8U和CV_32F两种数据类型。对于图像通道数目的要求与选择的二值化方法相关。
dst:二值化后的图像,与输入图像具有相同的尺寸、数据类型和通道数
thresh:二值化的阈值
maxval:二值化过程的最大值,它只在THRESH_BINARY 和 THRESH_BINARY_INV两种二值化方法中使用
type:选择图像二值化方法的标志
二值化中type的取值表:
| 标志函数 | 简记 | 作用 |
|---|---|---|
| THRESH_BINARY | 0 | 灰度值大于阈值的为最大值,其他值为0 |
| THRESH_BINARY_INV | 1 | 灰度值大于阈值的为0,其他值为最大值 |
| THRESH_TRUNC | 2 | 灰度值大于阈值的为阈值,其他值不变 |
| THRESH_TOZERO | 3 | 灰度值大于阈值的不变,其他值为0 |
| THRESH_TOZERO_INV | 4 | 灰度值大于阈值的为0,其他值不变 |
| THRESH_OTSU | 8 | 大律法自动寻求全局阈值 |
| THRESH_TRIANGLE | 16 | 三角形法自动寻求全局阈值 |
特别要研究的THRESH_OTSU和THRESH_TRIANGLE函数,这两个函数可以与上面的5种一起使用,例如”THRESH_BINARY| THRESH_OTSU"。这两个函数相比于自己设置阈值的优势在于,它们是分别通过大律法和三角形法并结合图像的灰度值获取的二值化阈值,多数情况下比人为设定的阈值更加合理,从而使图像在处理后更加符合理想的状态,运用这两种方法设定的阈值会被自动传入到参数thresh中。
具体这两种方法推荐两篇博客:
图像预处理——二值化(大律法)_xiao_lxl的专栏-CSDN博客_大律法二值化
图像处理之三角法图像二值化_weixin_34203832的博客-CSDN博客
threshold()全局只用一个阈值,而adaptiveThreshold()函数提供了两种局部自适应阈值的二值化方法
adaptiveThreshold()函数
void adaptiveThreshold(InputArray src, OutputArray dst, double maxValue, int adaptiveMethod, int thresholdType, int blockSize, double C)
src:待二值化的图像,图像只能是CV_8UC1数据类型
dst:二值化后的图像,与输入图像具有相同的尺寸、数据类型
maxValue:二值化的最大值
adaptiveMethod:自适应确定阈值的方法,分为均值法ADAPTIVE_THRESH_MEAN_C 和 高斯法 ADAPTIVE_THRESH_GAUSSIAN_C两种
thresholType:选择图像二值化方法的标志,只能是THRESH_BINARY 和 THRESH_BINARY_INV
blockSize:自适应确定阈值的像素领域大小,一般为3、5、7的级数
C:从平均值或者加权平均值中减去的常数,可以为正,也可以为负
该函数将灰度图像转换成二值图像,通过均值法和高斯法自适应地计算blockSize*blockSize领域内的阈值,之后进行二值化。
示例程序:
#includeimg_B:
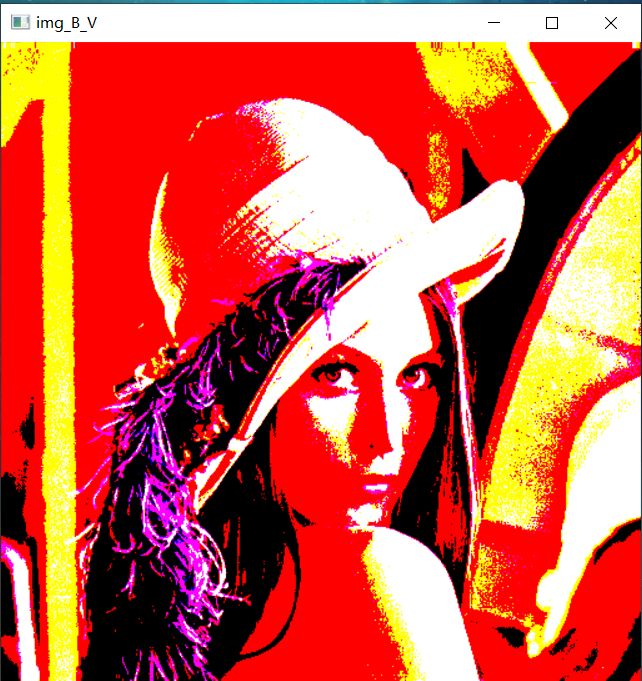
img_B_V:
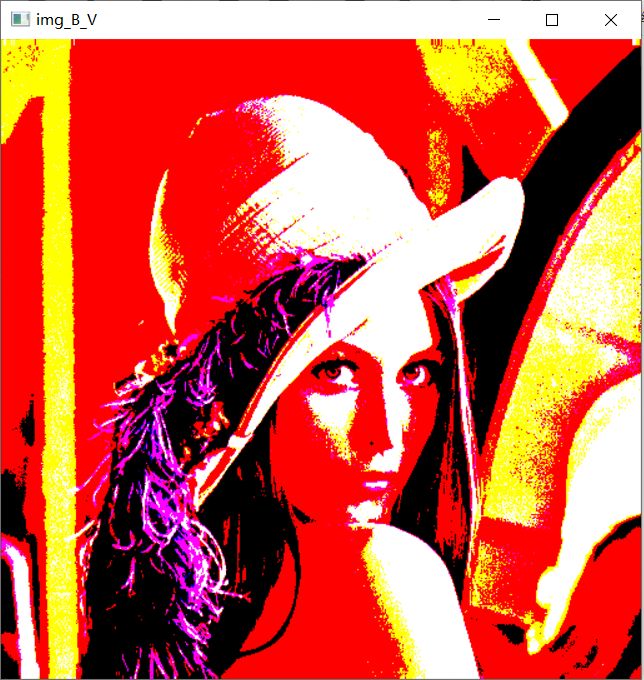
可以看出差别不是很大
gray_TRUNC:

gray_T_V:

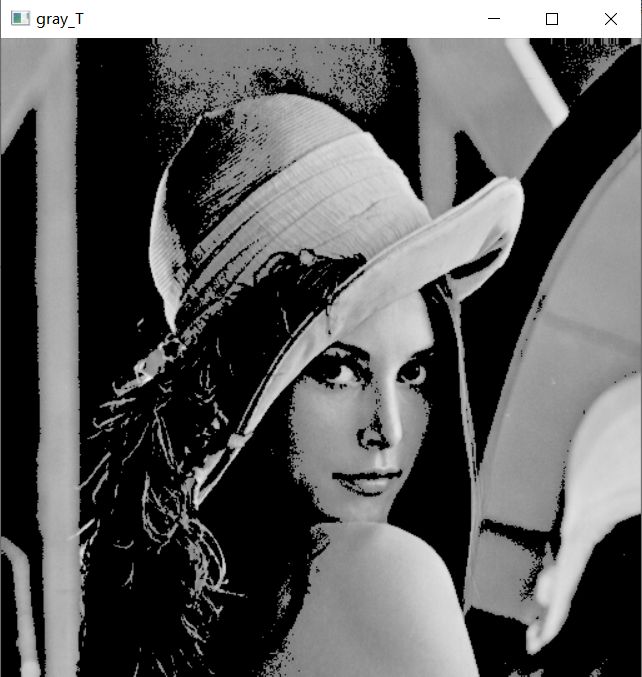
gray_T:
gray_B_V:

gray_B:
原图img_Thr:
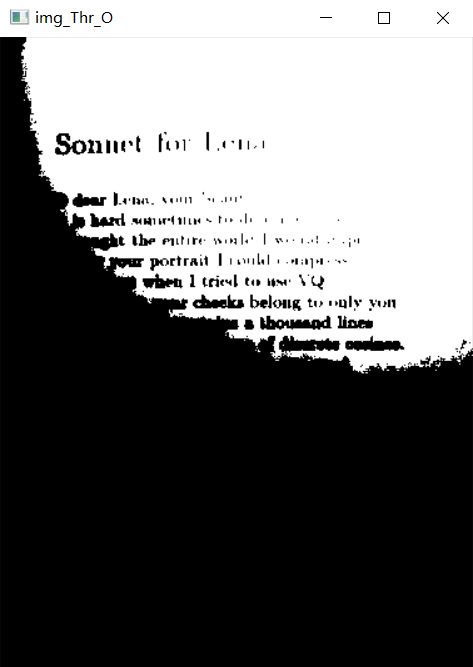
大律法img_Thr_O:
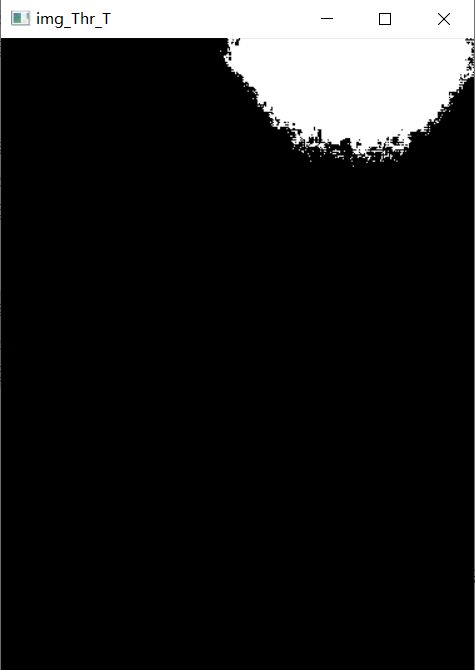
三角形法img_Thr_T:
均值法adaptiv_mean:

高斯法adaptive_gauss:

感谢阅读!
也欢迎大家关注小白博主,多多鼓励一下!