深度学习基础知识(一)--- 权重初始化
1、为什么需要权重初始化?
① 为了使神经网络在合理的时间内收敛
② 为了尽量避免在深度神经网络的正向(前向)传播过程中层激活函数的输出梯度出现爆炸或消失。
2、如何进行初始化?
①如果将每个隐藏单元的参数都初始化为0
那么在正向传播时每个隐藏单元将根据相同的输入计算出相同的值,并传递至输出层。在反向传播中,每个隐藏单元的参数梯度值相等。因此,这些参数在使用基于梯度的优化算法迭代后值依然相等。这样所有隐层的单元都是对称的了,很难学到什么有效的信息,之后的迭代也是如此。
所以权重初始化不能将权重参数全部初始化为0,应打破这种对称性。
②如果将参数都初始化为0周围极小的值:
也不好,比如如果用sigmoid做激活函数,它在0周围是近似线性的,如果我们的参数都初始化为0附近,那么可能数据经过神经元之后,大部分都落在线性区,那么我激活函数引入非线性的作用将被削减。
③如果参数都初始化为较大的值,很显然容易使得输出落入饱和区。
所以合理的初始化时比较重要的,一般采用随机的初始化。
3、常见的几种初始化方式
①、均匀分布初始化:
将参数初始化为 均匀分布U(a,b) 上的随机值,pytorch的实现方案:
torch.nn.init.uniform_(tensor, a=0, b=1)
②、高斯初始化:
将参数初始化为 高斯分布N(0,1) 上的随机值,pytorch的实现方案:
torch.nn.init.normal_(tensor, mean=0, std=1)
③、常数初始化:
将参数初始化为一个 固定的常数val, pytorch实现方案为:
torch.nn.init.constant_(tensor, val)
上面三种初始化方法其实并不是十分理想的初始化方案,因为如果网络层数过深的话,
依然会导致 梯度爆炸 或者 梯度弥散的情况出现,
一般在使用中,可能就是神经网络 中的某一两层可能会用到上述初始化方案,比如自己写的某几层
并不建议对所有的参数都使用上述初始化方案
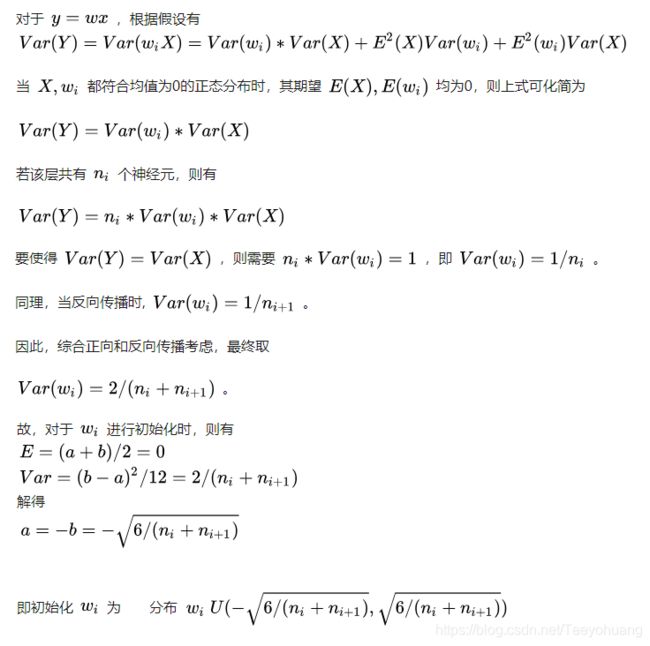
4、Xiaver 初始化方案
Xavier初始化的基本思想是,若对于一层网络的输入和输出的方差尽量不变,
这样就可以避免输出趋向于0,从而避免梯度弥散情况。
参考资料:
https://prateekvjoshi.com/2016/03/29/understanding-xavier-initialization-in-deep-neural-networks/
http://proceedings.mlr.press/v9/glorot10a/glorot10a.pdf
https://zhuanlan.zhihu.com/p/64464584
https://zhuanlan.zhihu.com/p/40175178
pytorch的实现方案①:torch.nn.init.xavier_uniform_(tensor, gain=1)
将参数初始化为均匀分布 U(-α, α) 上的随机值,其中 α 取值为:
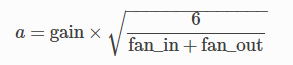
fan_in 指输入端神经元的个数, fan_out指输出端神经元的个数,它会自己根据网络计算。
gain 是一个增益, 默认为1;
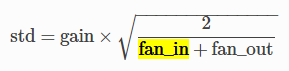
pytorch的实现方案②:torch.nn.init.xavier_normal_(tensor, gain=1)
将参数初始化为高斯分布 N(0, std^2) 上的随机值,而std的取值是:
5、Kaiming初始化方案
Kaiming初始化基本思想是,当使用ReLU做为激活函数时,Xavier的效果不好,
原因在于:当ReLU的输入小于0时,其输出为0,影响了输出的分布模式。
也就是激活函数输出均值不为0,我们上面的推导中是有假设E(X)=0的
因此Kaiming He初始化,在Xavier的基础上,假设每层网络有一半的神经元被关闭,于是其分布的方差也会变小。所以提出一个新的假设,那就是前向传播中,如果采用Xiaver,方差会缩小为原来一半,那么为了修正这个缩减,就使得参数初始化的范围比原来扩大一倍
(如果理解有误,欢迎指正,提前谢过)
pytorch实现方案①:
torch.nn.init.kaiming_uniform_(tensor, a=0, mode='fan_in', nonlinearity='leaky_relu')
将参数初始化为均匀分布U(-bound, bound)上的随机值,其中 bound 取值为:

α:该层后面一层的激活函数中负的斜率 (0 for ReLU by default)
mode : ‘fan_in’ (default) 或者‘fan_out’.
使用fan_in保持weights的方差在前向传播中不变;
使用fan_out保持weights的方差在反向传播中不变。
pytorch实现方案②:
torch.nn.init.kaiming_normal_(tensor, a=0, mode='fan_in', nonlinearity='leaky_relu')
将参数初始化为高斯分布N(0,std^2)上的随机值,而std的取值是:
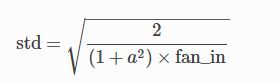
α:该层后面一层的激活函数中负的斜率 (0 for ReLU by default)
mode : ‘fan_in’ (default) 或者‘fan_out’.
使用fan_in保持weights的方差在前向传播中不变;
使用fan_out保持weights的方差在反向传播中不变。
6. pytorch常见的 权重初始化 操作方法
方案一:直接对某层的data进行赋值
举例:
self.conv1.weight.data.normal_(0, 0.01)
self.conv1.bias.data.zero_()方案二:调用nn初始化模块:
torch.nn.init.normal_(self.conv1.weight, std=0.01)
torch.nn.init.constant_(self.conv1.bias, 0)
可搭配for循环使用:
for layer in self.children():
torch.nn.init.normal_(layer.weight, std=0.01)
torch.nn.init.constant_(layer.bias, 0)方案三: 定义一个自己的小函数
def _weight_init(m):
classname = m.__class__.__name__
if classname.find('Conv') != -1:
torch.nn.init.xavier_(m.weight)
torch.nn.init.xavier_(m.bias)
if classname.find('Linear') != -1:
torch.nn.init.normal_(m.weight, std=0.01)
torch.nn.init.constant_(m.bias, 0)
#或者不读取下划线,直接看是不是某个类,这种方法相对来说更安全一些
def _weights_init(m):
if isinstance(m, torch.nn.Conv2d):
torch.nn.xavier_(m.weight)
torch.nn.xavier_(m.bias)
if isinstance(m, torch.nn.Linear):
torch.nn.init.normal_(m.weight, std=0.01)
torch.nn.init.constant_(m.bias, 0)
然后对某个Net应用:
Net.apply(_weight_init)以上三个均为示例,具体使用情况请依据自己的网络和具体的代码,请勿生搬硬套。