ROS入门教程(二)—— ROS的版本选择与安装
上篇文章我们介绍了VMware与Ubuntu的安装,本文将继上文介绍安装完Ubuntu18.04后一些基本设置,并且介绍如何根据Ubuntu版本选择正确的ROS版本。
目录
前期准备
1.切换镜像源
2.安装中文输入法【已经安装输入法的可以跳至后文ROS版本的选择】
ROS版本的选择与安装
安装结果测试
建议读者从Ubuntu中使用火狐浏览器中重新打开本文以便于学习
前期准备
1.切换镜像源
国内安装完Ubuntu以后的第一步,本文认为有且仅有一个那就是切换源至国内,切换源的目的可以简单地理解为将下载地址设为国内以此提高下载速度,本文选择的是阿里云的源。
Show Application -> Software & Updates -> Ubuntu Software -> Download from -> China

2.安装中文输入法【已经安装输入法的可以跳至后文ROS版本的选择】
本文认为中文输入法是国内学者学会使用Ubuntu必不可少的一个工具,当读者遇到任何问题时候可以便于在搜索引擎上搜索,众所周知的搜索引擎有百度等均可。
本文选择安装搜狗输入法,读者可以自行选择习惯的中文输入法,搜狗输入法 for linux的官网提供了大致的安装过程,本文为新手读者提供了更为详细的安装过程,如读者安装中遇到本文未提及的情况可选择在搜索引擎中直接搜索问题。
Step1:安装fcitx
打开终端是Ubuntu中最基本的操作:Ctrl+Alt+T,读者需要牢记这一点。
在终端中输入:【终端中不允许使用复制/粘贴快捷键Ctrl+C/V可使用右键Paste】
sudo apt-get install fcitx【以 $ 开头的代码块默认为终端中的代码,为便于读者安装去除了 $ 】
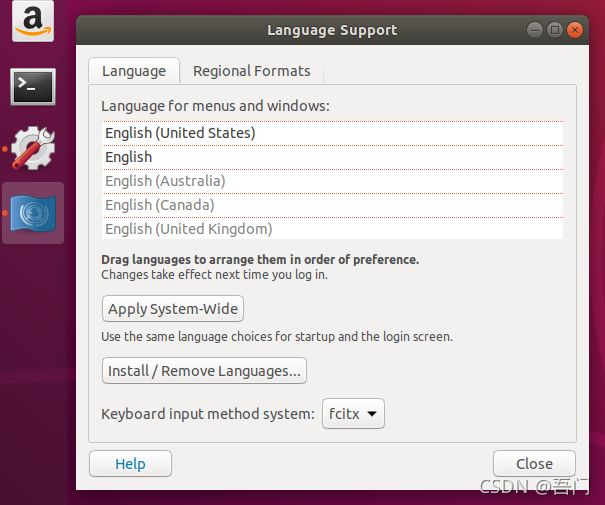
Step2:配置fcitx
Show Application -> Setting -> Region&Langage -> Manage Installed Languages -> Keyboard input method system:fcitx
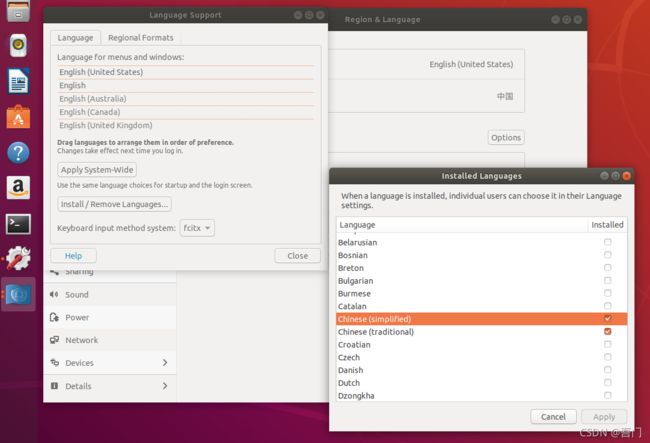
Step3:Languages设置
Show Application -> Setting -> Region&Langage -> Manage Installed Languages -> Install Languages -> Chinese(simplified) 【注:Chinese(traditional)为繁体中文】
 Step4:安装搜狗输入法
Step4:安装搜狗输入法
在搜狗输入法 for linux的官网中下载deb安装包至Ubuntu中,并找到其位置,在Flies中我们可以很轻易的找到他在Downloads中,可实际它真的如此吗?读者可以自行思考。 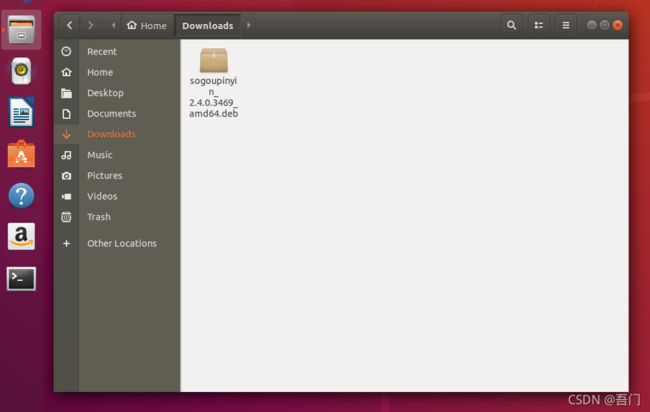 实际上在Ubuntu中的其位置为home/用户名/Downloads中,需要注意的是用户名,读者可以很轻松的发现,用户名即终端中@的前半部分。读者如果不确定可以在终端中输入:
实际上在Ubuntu中的其位置为home/用户名/Downloads中,需要注意的是用户名,读者可以很轻松的发现,用户名即终端中@的前半部分。读者如果不确定可以在终端中输入:
who
我们在搜狗输入法 for linux 安装指南中可以看到指南中指出:
通过命令行安装搜狗输入法
sudo dpkg -i sogoupinyin_版本号_amd64.deb
读者自行尝试后可发现会存在两个问题:
1.所下载搜狗输入的版本号是什么;2.在命令行中直接输入会报错。
解决方法如下:1.从deb中找到所需的版本号;2.终端进入~cd目录后再输入命令。
截止到目前官网所提供的搜狗输入法的版本为:V2.4.0.3469
deb所在的目录为:home/用户名/Downloads
只需要在命令行中逐行输入:【作者的用户名为ys-1107】
cd /home/ys-1107/Downloads
sudo apt-get -f install
sudo dpkg -i sogoupinyin_2.4.0.3469_amd64.debStep5:配置搜狗输入法
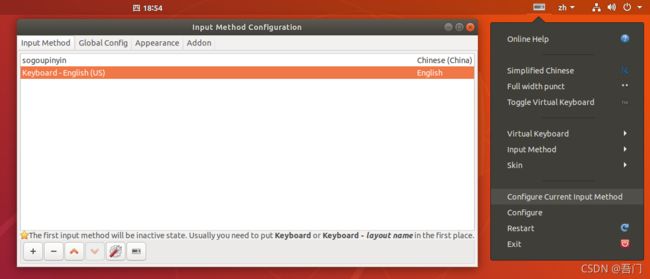
重启电脑后,在右上角的小键盘中选择Configure Current Input Method加入搜狗输入法即可,此步骤略写,读者可自行摸索。
ROS版本的选择与安装
ROS官方教程中给出了ROS版本选择方案的英文版本,本文将以此为基础进行介绍。
ROS Installation Options
ROS Melodic Morenia
Released May, 2018
LTS, supported until May, 2023
Recommended for Ubuntu 18.04ROS Noetic Ninjemys
Released May, 2020
Latest LTS, supported until May, 2025
Recommended for Ubuntu 20.04
根据官方的选项中,不难发现官方推荐:安装Melodic Morenia于Ubuntu18.04中。
Step1:建议读者先更新apt,在终端中输入:
sudo apt-get updateStep2:进入Mirrors选择国内的源,本文选用国科大的镜像源:【国内源可以提高下载速度】
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.bfsu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'Step3:读者查询其余的安装教程可能会给出具体的某个密钥反而安装出现error,实际上ROS是开源的,ROS官方已经给出了密钥:
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -Step4:更新deb并安装ros-melodic-full【推荐新手安装完整版】
sudo apt update
sudo apt install ros-melodic-desktop-fullStep5:环境配置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc实际上,安装到这里ROS的核心部分就已经安装完成了,ROS Melodic官方教程还给出了一些必要包安装的方法,本文也将继续介绍。
Step6:安装rosinstall
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essentialStep7:安装rosdep
sudo apt install python-rosdepsudo rosdep init
rosdep update安装结果测试
本文作者在安装过程中没有出现问题,大家可参考其他博客的解决方案解决。本文在这选用了一种传统且常见的方法来验证ROS的安装是否完成——海龟仿真器。
Step1:启动节点管理器
roscoreStep2:新建一个终端,调用小海龟例程
rosrun turtlesim turtlesim_nodeStep3:再新建一个终端,启动键盘控制
rosrun turtlesim turtle_teleop_keyStep4:在键盘控制终端使用键盘控制海龟运动【在键盘控制端而不是海龟窗口】
到这里,恭喜你终于完成了ROS的安装,但这只是开始,未来我们还会学习ROS的相关知识并且实践。
ROS入门教程(三)—— 用C++或Python实现Hello world