Opencv图像处理3-边缘检测
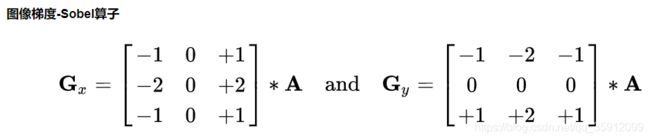
图像梯度-Sobel算子

img = cv2.imread('pie.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("img",img)
cv2.waitKey()
cv2.destroyAllWindows()
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) #水平方向
cv_show(sobelx,'sobelx')白到黑是正数,黑到白就是负数了,所有的负数会被截断成0,所以要取绝对值
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)# 取绝对值
cv_show(sobelx,'sobelx')
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)#垂直方向
sobely = cv2.convertScaleAbs(sobely)
cv_show(sobely,'sobely')sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')
不建议直接计算XY方向梯度
sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
sobelxy = cv2.convertScaleAbs(sobelxy)
cv_show(sobelxy,'sobelxy')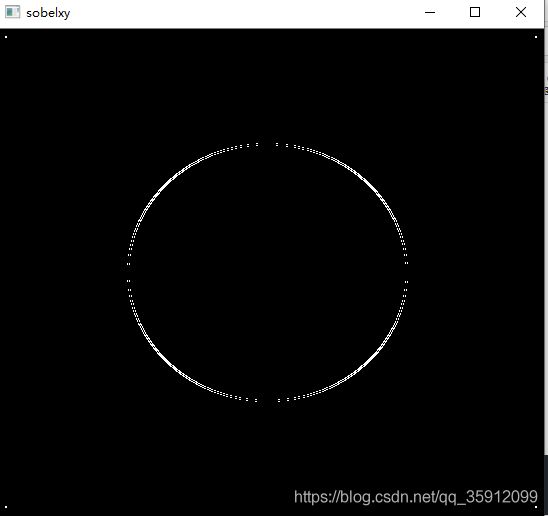
图像梯度-Scharr算子
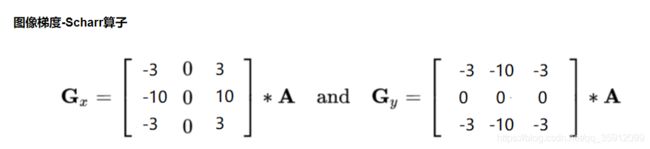
scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0) 图像梯度-Laplacian算子

laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)
 (SOBEL SCHARR LAPLACIAN)
(SOBEL SCHARR LAPLACIAN)
Canny边缘检测-其他算法的提升版本
Canny边缘检测基本思想
- 1) 使用高斯滤波器,以平滑图像,滤除噪声。
- 2) 计算图像中每个像素点的梯度强度和方向。
- 3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
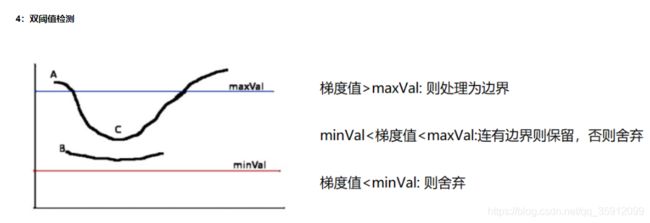
- 4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
- 5) 通过抑制孤立的弱边缘最终完成边缘检测。


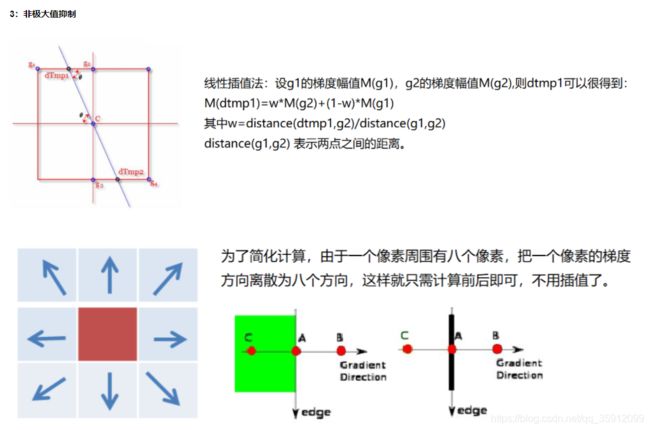
线性插值法
1、线性插值法中 C为目标点 确定了梯度模值和方向
2、找寻临近值 并比较 抑制较小值点
3、线性插值 选取临近点求亚像素点
简化方法- 梯度和边界是垂直的
1、直接由梯度方向 在八个方向选择较近的两个点
2、然后比较目标点与临近点梯度值
对保留的边界点进行判断筛选
img=cv2.imread("lena.jpg",cv2.IMREAD_GRAYSCALE)
v1=cv2.Canny(img,80,150)
v2=cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show(res,'res')
img=cv2.imread("car.png",cv2.IMREAD_GRAYSCALE)
cv_show(img,'img')
img=cv2.imread("car.png",cv2.IMREAD_GRAYSCALE)
v1=cv2.Canny(img,120,250)
v2=cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show(res,'res')