Swin-Transformer
Swin Transformer: Hierarchical Vision Transformer using Shifted Windows
论文地址: https://arxiv.org/abs/2103.14030
代码链接:https://github.com/microsoft/Swin-Transformer
本文介绍了一种称为 Swin Transformer 的新视觉 Transformer,它可以作为 CV 的通用主干。将 Transformer 从语言适应到视觉方面的挑战来自 两个域之间的差异,例如视觉实体的规模以及相比于文本单词的高分辨率图像像素的巨大差异。
目前Transformer应用到图像领域主要有两大挑战:
- 视觉实体变化大,在不同场景下视觉Transformer性能未必很好
- 图像分辨率高,像素点多,Transformer基于全局自注意力的计算导致计算量较大
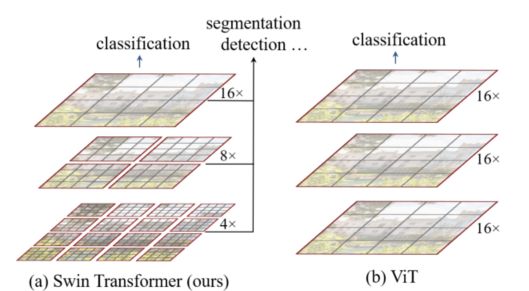
针对上述两个问题,本文提出了一种包含滑窗操作,具有层级设计的Swin Transformer。
其中滑窗操作包括不重叠的local window,和重叠的cross-window。将注意力计算限制在一个窗口中,一方面能引入CNN卷积操作的局部性,另一方面能节省计算量。
通过与CNN相似的分层结构来处理图片,使得模型能够灵活处理不同尺度的图片
与在语言 Transformer 中作为处理的基本元素的 word token 不同,视觉元素在尺度 (scale) 上可以存在很大差异,这是一个在目标检测等任务中受到关注的问题。在现有的基于 Transformer 的模型中,token 的尺度 (scale) 都是固定的,这是一种不适合这些视觉应用的性质。另一个差异是,图像中的像素分辨率比文本段落中的文字要高得多。存在许多视觉任务 ,如语义分割,需在像素级别上进行密集预测,这对于高分辨率图像上的 Transformer 而言是难以处理的,因为其自注意力的计算复杂度是关于图像大小的二次方。
模型框架


论文和程序中都要注意三个不同的概念,分别是resolution/ patches/ windows
resolution: 输入图片的分辨率是像素分辨率,程序Part 1 输入图片是像素分辨率,但是Part 2程序中对应的H/W是patches 分辨率,不是像素分辨率。
patches: 图像4*4像素区域称为一个patch,分类任务输入图像像素分辨率是224*224,patch_size = 4,所以patches__resolution = 56*56
windows: 窗口大小由patches定义的,不是像素定义的,论文及程序中window_size = 7,说明一个window有7*7=49个patches
PatchEmbed
在输入进Block前,我们需要将图片切成一个个patch,然后嵌入向量。
具体做法是对原始图片(img_size*img_size)裁成一个个 patch_size * patch_size的窗口大小,然后进行嵌入。
这里可以通过二维卷积层,将stride,kernelsize设置为patch_size大小。设定输出通道来确定嵌入向量的大小。最后将H,W维度展开,并移动到第一维度
class PatchEmbed(nn.Module):
r""" Image to Patch Embedding
Args:
img_size (int): Image size. Default: 224.
patch_size (int): Patch token size. Default: 4.
in_chans (int): Number of input image channels. Default: 3.
embed_dim (int): Number of linear projection output channels. Default: 96.
norm_layer (nn.Module, optional): Normalization layer. Default: None
"""
def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):
super().__init__()
img_size = to_2tuple(img_size) #img_size=(img_size ,img_size)
patch_size = to_2tuple(patch_size) #patch_size(patch_size,patch_size)
patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]
self.img_size = img_size #img_size=(224,224)
self.patch_size = patch_size #patch_size=(4,4)
self.patches_resolution = patches_resolution #patches_resolution=(224/4,224/4)
self.num_patches = patches_resolution[0] * patches_resolution[1]
self.in_chans = in_chans #3
self.embed_dim = embed_dim #96
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
if norm_layer is not None:
self.norm = norm_layer(embed_dim)
else:
self.norm = None
def forward(self, x):
'''
#以默认参数为例 #输出(B,C,H,W)=(B,3,224,224)
x=self.proj(x) #输出(B,96,224/4,224/4)=(B,96,56,56)
x=torch.flatten(x,2) #将最后两个维度展平,则输出(B,96,56*56)
x=torch.transpose(x,1,2) #将C维放最后 ,输出(B,56*56,96)
'''
B, C, H, W = x.shape
# FIXME look at relaxing size constraints
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
if self.norm is not None:
x = self.norm(x)
return x
def flops(self):
Ho, Wo = self.patches_resolution
flops = Ho * Wo * self.embed_dim * self.in_chans * (self.patch_size[0] * self.patch_size[1])
if self.norm is not None:
flops += Ho * Wo * self.embed_dim
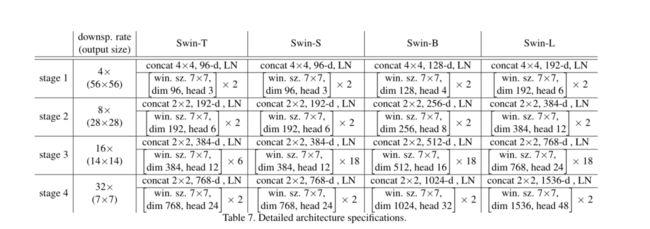
return flopsPatch Merging(分辨率减半,通道数加倍)
该模块的作用是在每个Stage开始前做降采样,用于缩小分辨率,调整通道数,进而形成层次化的设计,同时也能节省一定运算量。
class PatchMerging(nn.Module):
r""" Patch Merging Layer.
Args:
input_resolution (tuple[int]): Resolution of input feature.
dim (int): Number of input channels.
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
super().__init__()
self.input_resolution = input_resolution
self.dim = dim
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
self.norm = norm_layer(4 * dim)
def forward(self, x):
"""
x: B, H*W, C
"""
H, W = self.input_resolution
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even."
x = x.view(B, H, W, C)
x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
#view函数相当于numpy中的reshape,重新定义矩阵的形状
x = self.norm(x)
x = self.reduction(x)
return x
Swin Transformer Block(论文核心部分)

Window self-Attention

传统的Transformer都是基于全局来计算注意力的,因此计算复杂度十分高。而Swin Transformer则将注意力的计算限制在每个窗口内,进而减少了计算量。

关于MSA和W-MSA的计算复杂度的对比

假设q, k, v的向量长度与feature map的深度C保持一致,对应所有像素生成Q的过程如下式:

( h:代表的是特征图的高度,w:代表的是特征图的宽度,C代表的是特征图的通道数。)根据矩阵运算的计算量公式可以得到生成Q的计算量为![]() ,生成K,V的计算量与Q一致。共
,生成K,V的计算量与Q一致。共 ,根据自注意力机制公式,Q要乘以K的转置,计算复杂度为
,根据自注意力机制公式,Q要乘以K的转置,计算复杂度为![]() 即
即 接下来忽略softmax和
接下来忽略softmax和![]() 的计算量,最后乘以V的计算量
的计算量,最后乘以V的计算量![]() 对应的单头自注意力机制的计算量为
对应的单头自注意力机制的计算量为 ,多头注意力相比单头注意力模块的计算量仅多了最后一个融合矩阵
,多头注意力相比单头注意力模块的计算量仅多了最后一个融合矩阵![]() 的计算量,即
的计算量,即![]() 。
。
而W-MSA首先要将特征图切分成一个个的patch,然后在每一个patch里面计算MSA,我们可以假设每一个patch的宽和高都是M,那么总共会得到(H/M*W/M)个patch,我们计算一个patch的计算量,宽和高都为M,即和单头注意力机制度计算公式相同, ,但是我们总共有(H/M*W/M)个patch,乘以总共的patch数,得到计算量为
,但是我们总共有(H/M*W/M)个patch,乘以总共的patch数,得到计算量为
shifted window self-attention

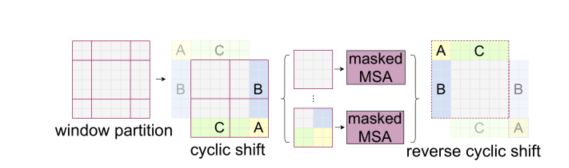
calculate attention mask for SW-MSA
def create_mask(self, x, H, W):
# calculate attention mask for SW-MSA
# 保证Hp和Wp是window_size的整数倍
Hp = int(np.ceil(H / self.window_size)) * self.window_size
Wp = int(np.ceil(W / self.window_size)) * self.window_size
# 拥有和feature map一样的通道排列顺序,方便后续window_partition
img_mask = torch.zeros((1, Hp, Wp, 1), device=x.device) # [1, Hp, Wp, 1]
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # [nW, Mh, Mw, 1]
mask_windows = mask_windows.view(-1, self.window_size * self.window_size) # [nW, Mh*Mw]
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, 1, Mh*Mw] - [nW, Mh*Mw, 1]
# [nW, Mh*Mw, Mh*Mw]
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_maskWSA
class WindowAttention(nn.Module):
r""" Window based multi-head self attention (W-MSA) module with relative position bias.
It supports both of shifted and non-shifted window.
Args:
dim (int): Number of input channels.
window_size (tuple[int]): The height and width of the window.
num_heads (int): Number of attention heads.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0
proj_drop (float, optional): Dropout ratio of output. Default: 0.0
"""
def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # [Mh, Mw]
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = head_dim ** -0.5
# define a parameter table of relative position bias
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # [2*Mh-1 * 2*Mw-1, nH]
# get pair-wise relative position index for each token inside the window
# torch.arange在行方向和列方向生成等距的索引,torch.meshgrid生成网格坐标索引
coords_h = torch.arange(self.window_size[0])
coords_w = torch.arange(self.window_size[1])
"""
(tensor([[0, 0],
[1, 1]]),
tensor([[0, 1],
[0, 1]]))
"""
coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing="ij")) # [2, Mh, Mw]
coords_flatten = torch.flatten(coords, 1) # [2, Mh*Mw]
"""
tensor([[0, 0, 1, 1],
[0, 1, 0, 1]])
"""
# [2, Mh*Mw, 1] - [2, 1, Mh*Mw]
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # [2, Mh*Mw, Mh*Mw]
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # [Mh*Mw, Mh*Mw, 2]
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # [Mh*Mw, Mh*Mw]
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
nn.init.trunc_normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask: Optional[torch.Tensor] = None):
"""
Args:
x: input features with shape of (num_windows*B, Mh*Mw, C)
mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
"""
# [batch_size*num_windows, Mh*Mw, total_embed_dim]
B_, N, C = x.shape
# qkv(): -> [batch_size*num_windows, Mh*Mw, 3 * total_embed_dim]
# reshape: -> [batch_size*num_windows, Mh*Mw, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
# [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
q, k, v = qkv.unbind(0) # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size*num_windows, num_heads, embed_dim_per_head, Mh*Mw]
# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, Mh*Mw]
q = q * self.scale
attn = (q @ k.transpose(-2, -1))
# relative_position_bias_table.view: [Mh*Mw*Mh*Mw,nH] -> [Mh*Mw,Mh*Mw,nH]
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # [nH, Mh*Mw, Mh*Mw]
attn = attn + relative_position_bias.unsqueeze(0)
if mask is not None:
# mask: [nW, Mh*Mw, Mh*Mw]
nW = mask.shape[0] # num_windows
# attn.view: [batch_size, num_windows, num_heads, Mh*Mw, Mh*Mw]
# mask.unsqueeze: [1, nW, 1, Mh*Mw, Mh*Mw]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
# transpose: -> [batch_size*num_windows, Mh*Mw, num_heads, embed_dim_per_head]
# reshape: -> [batch_size*num_windows, Mh*Mw, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x不同视觉任务有不同的输出:

参考文章:【机器学习】详解 Swin Transformer (SwinT)_花与人间事同的博客-CSDN博客_swin transformer
Swin-Transformer网络结构详解_太阳花的小绿豆的博客-CSDN博客_swin transformer详解
12.1 Swin-Transformer网络结构详解_哔哩哔哩_bilibili
Swin Transformer 论文详解及程序解读 - 知乎 (zhihu.com)
图解Swin Transformer - 知乎 (zhihu.com)
论文详解:Swin Transformer - 知乎 (zhihu.com)