Graph Matching
受严骏驰老师讲座内容启发,最近项目中一个关键问题才找到了一些解决途径,为了能够快速对Graph Matching的起源和发展现状有一定了解,从而形成知识体系来更好得解决问题,准备慢下来,把这些知识沉淀下来,写成一篇blog。
(讲座链接:https://www.bilibili.com/video/BV1Zf4y1S7Zr)
Graph Matching 属于一种组合优化问题,图这类数据结构形式在推荐系统、知识图谱等中最为常见,而在计算机视觉领域中,为解决少样本学习或目标检测类别长尾分布等,图结构也有较多工作采用。
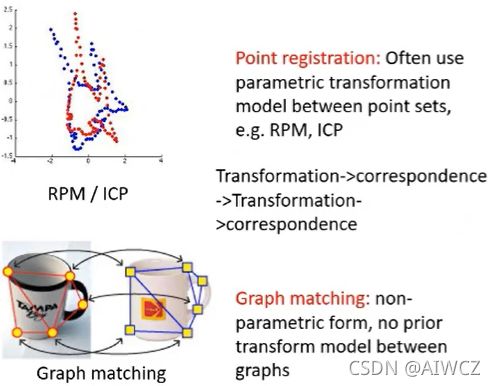
1. Graph matching 和 Registration 的区别?
用一句话说:Registration需要在变换空间中寻找一种最有效的变换,这种变换能够使两幅图像之间在某种意义上达到匹配,而Graph matching是一种非参数的模型,只关心point之间和edge之间的对应关系。
2. 最原始的Graph matching有哪些步骤?
①提取特征(特征检测):1. SIFT , 2. CNN

②初始化assignment matrix
a. 1st-order Feature
Node correspondence, 此时是 Feature Matching问题,是linear的。
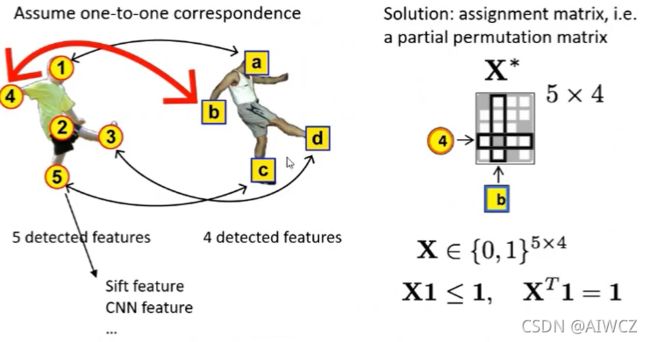
b. 2nd-order Feature
此时才是 Graph Matching 问题,是quadratic(二次)的,因此其也被称作**QAP(Quadratic Assignment problem)**问题。
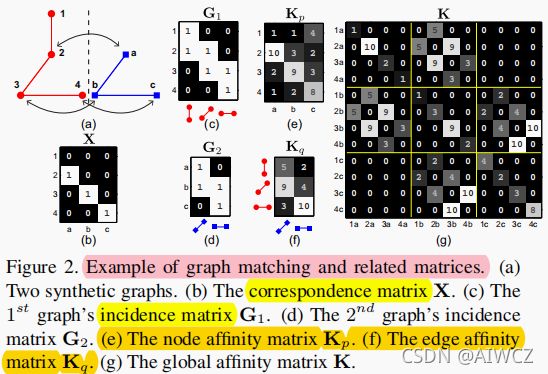
③建立Kp(Kq)存储相似度信息
a. Kp矩阵。
下图中的Cst即是一种相似度计算方式,两两进行计算来填充。

b. Kq矩阵

c. Affinity Matrix
进一步得,为了让存储相似度信息更加方便,采用Affinity Matrix代替Kp、Kq存储的相似度信息。
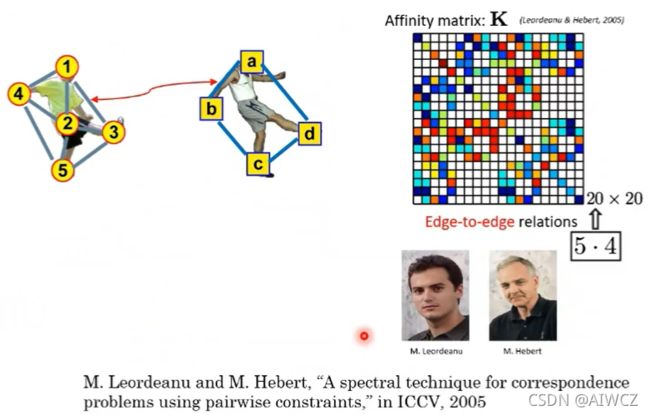
d. 上图Affinity Matrix的解释:
横纵轴每格代表的节点对相同,事先进行编码。
例如,以左上角为原点,向右向下分别代表着,1a,1b,1c…。
1.对角线(Diagonal)元素20个,代表原Kp矩阵信息,例如1b - 1b,表示1节点和b节点的相似度。
2.非对角线元素则代表原Kq矩阵信息,例如3b - 5c,则代表35这条边和bc边的相似性。
即每个点构成一个超点,形成下图中的 Association Graph。

④求解目标:找到一个assignment matrix,使得总和相似性最大化
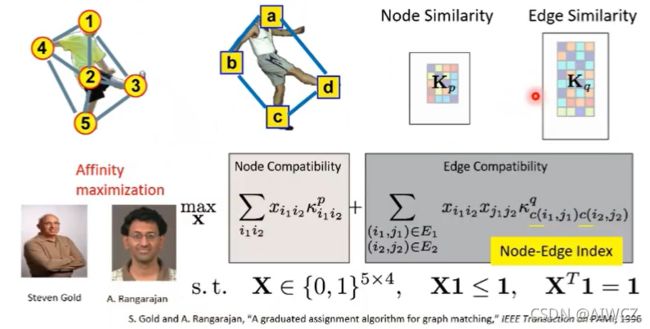
or:
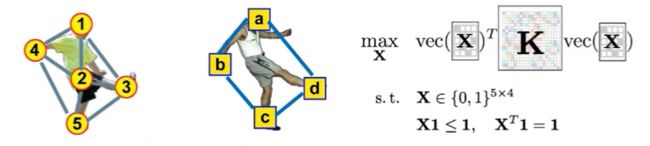
注意:这里的vec(X*)是对X*按 列 向量化,变成20X1的矩阵,转置后变成1X20。因此最后三个矩阵相乘是一个标量,对这个标量最大化即可。
3. 有哪些常用的改进手段?
①松弛
当上图中的K矩阵没有特殊性质时,解X*是一个NP-hard问题,因而对于Graph Matching问题,松弛手段的使用是常见的。
a. Spectral Approximation
去掉原始的 离散域限制条件:

化为模的形式,使得X*向量化后的二范数 为1。
即:
![]()
缺点:松弛后将不太紧凑
优点:求解速度快,利用类似谱方法求解,求特征值、特征向量等等。
相关文章:

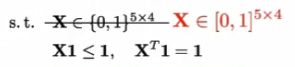
b. Double-stochastic Approximation
一种较为紧凑的松弛策略,仍保留原始不等式约束,将X*原本属于的0、1二值矩阵,松弛到[0,1]这一实数域。
即:
缺点:速度相较于a.来说慢一些
优点:紧凑
相关文章:

②考虑更高阶信息
我们在上面的讲解中有提到1st-order Feature和2nd-order Feature,从1st到2nd包含了更多的信息,一个自然而然的想法,是否可以扩展到 3-Order 及以上,形成一个超图,来对更多的信息进行建模泛化。
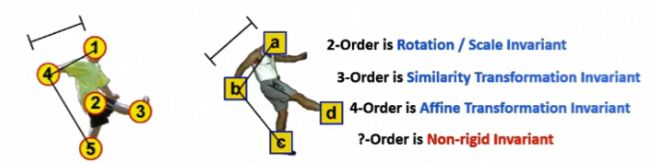
但在节点数较多时,相关的组合数会指数爆炸,因而现有的方法还是以二阶为主,但通过图嵌入的方式,有可能将高阶信息向低阶嵌入。

③K矩阵分解
从上面的描述可以看到,K矩阵是十分稀疏的,其空间规模远大于节点的Kp矩阵和边的Kq矩阵之和,因而找到一种将K矩阵进行分解的方法,用时间来换空间,就很有必要。
 最后推导出K矩阵可由上述几个小矩阵(G1、G2、Kp、Kq)做克罗内克(Kronecker)积。
最后推导出K矩阵可由上述几个小矩阵(G1、G2、Kp、Kq)做克罗内克(Kronecker)积。
即:
 相关文章:
相关文章:
![]()
补充知识:
哈达玛积(Hadamard products),完全的对应元素相乘,也叫 基本积。
克罗内克积(Kronecker products),张量积的特殊形式,见百度。
④Path-following optimization
基于分解模型可以提出一个路径跟踪算法,一开始做一个图优化的松弛,把原目标函数变成一个凸函数。图优化的好处在于 对初始解不敏感,最开始能够快速逼近最优解,而后再增大约束,变成凹函数,最终能够到达 自然收敛到离散解的目的,避免了连续域解激活时的偏差。
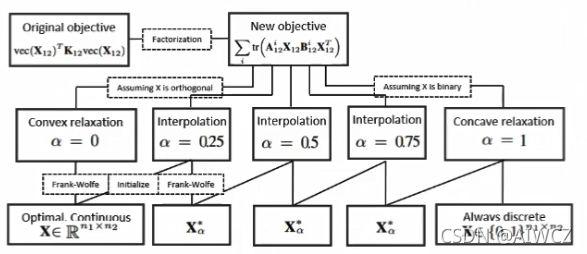
⑤小结
传统非机器学习(深度学习)方法,主要有两条路径:
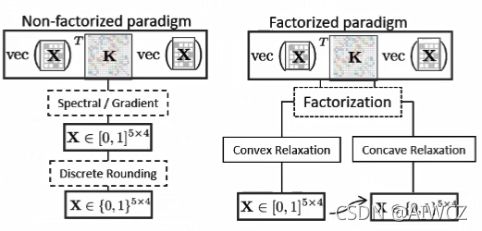 左列:不分解
左列:不分解
右列:分解了,空间换时间
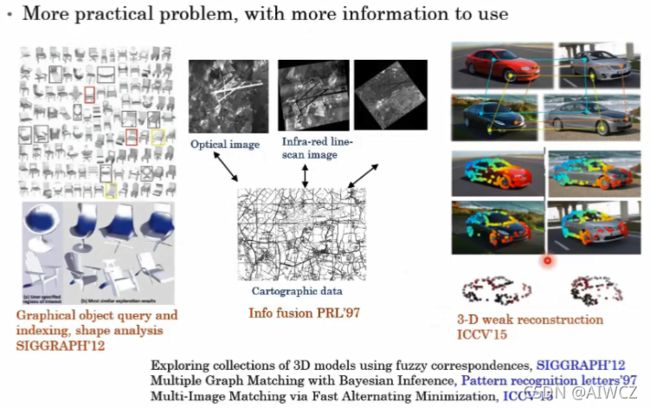
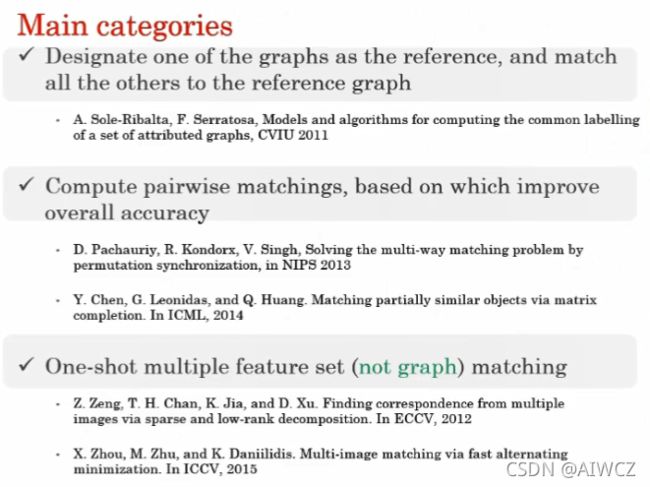
4. 从图的两两匹配到多图匹配?
在实际场景中,往往有多个图像需要同时匹配,此时两两图匹配的方式不仅速度较慢,而且还无法利用多个图的整体信息,影响鲁棒性。
 相关工作:
相关工作:
 相关文章解读,挖个坑,后面写
相关文章解读,挖个坑,后面写
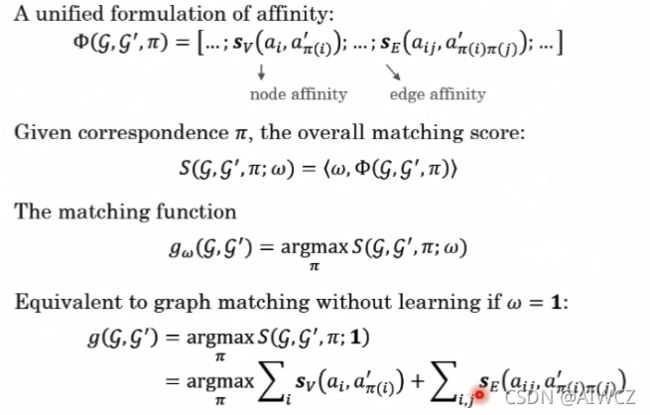
5. 目标函数建模的优化
多图匹配引入了一些正则,本质上是优化目标函数的建模。在多数Graph Matching问题中目标函数的全局最优解,并不是物理意义的最优解,因而一个自然而然的想法是,能否通过一些学习手段来优化目标函数。
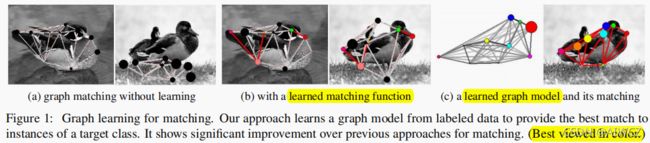
我们回到最初的Graph Matching中,我们是假定了,点与点之间,边与边之间的匹配重要程度是完全相同的,但在现实问题中并不是这样,我们需要对某些点和某些边更注意,这和纯CV里的 注意力机制有些相似。
a. “Learning Graph Matching” TPAMI2009 and " Learning Graphs to Match" ICCV2013
6. 基于深度学习的图匹配
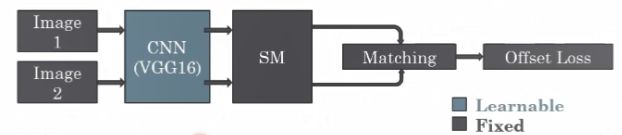
a.“Deep Learning of Graph Matching.” CVPR2018 最佳论文提名
论文中非常详细的反向传播推导,暂时挖个坑,后面再解读。
前向推理的思路是很简单的:
①给定两个图像
②用CNN去提取关键点的特征(即此时可以形成图结构并计算相似性)
③用谱方法SM计算特征值、特征向量(前文有讲解)
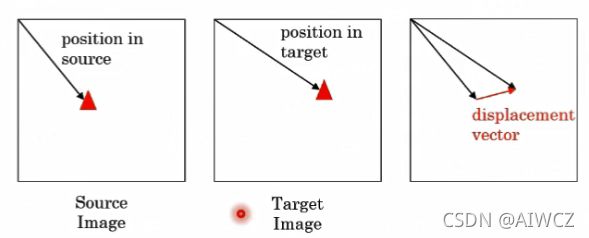
④做Matching算平移误差
⑤梯度回传更新CNN权重
本文局限
①SM是一个近似解,并不是针对Graph Matching的最优方案。
②SM复杂度高。
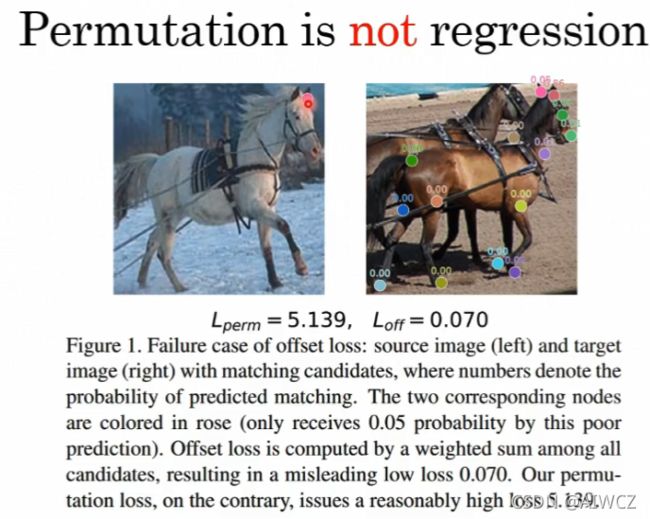
③offset Loss的损失函数有缺陷,类似光流损失函数,对 距离位移敏感。而对于匹配问题,不应该在意形变、物理平面差距,而应该最在意配没有配准。
即:
针对上述局限的改进:
b. Learning Combinatorial Embedding Networks for Deep Graph Matching(ICCV19)
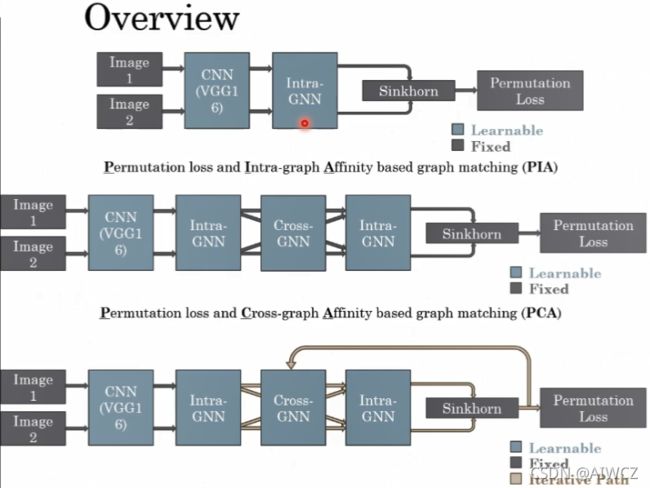
待续