命名实体识别主要方法
命名实体识别主要方法
命名实体识别(Named Entity Recognition,简称NER),又称作“专名识别”,是自然语言处理中的一项基础任务,应用范围非常广泛。命名实体一般指的是文本中具有特定意义或者指代性强的实体,通常包括 人名、地名、机构名、日期时间、专有名词等。通常包括两部分:
- 实体的边界识别
- 确定实体的类型(人名、地名、机构名或其他)
NER系统就是从非结构化的输入文本中抽取出上述实体,并且可以按照业务需求识别出更多类别的实体,比如产品名称、型号、价格等。因此实体这个概念可以很广,只要是业务需要的特殊文本片段都可以称为实体。
学术上NER所涉及的命名实体一般包括3大类(实体类,时间类,数字类)和7小类(人名、地名、组织机构名、时间、日期、货币、百分比)。
现状
- 命名实体识别只是在有限的文本类型(主要是新闻语料中)和实体类别(主要是人名、地名)中取得了效果
- 与其他信息检索领域相比,实体命名评测语料较小,容易产生过拟合
- 命名实体识别更侧重高召回率,但在信息检索领域,高准确率更重要
- 通用的识别多种类型的命名实体的系统性很差。
中文难点
- 汉语文本没有类似英文文本中空格之类的显式标示词的边界标示符,命名实体识别的第一步就是确定词的边界,即中文分词
- 汉语分词和命名实体识别互相影响
- 除了英语中定义的实体,外国人名译名和地名译名是存在于汉语中的两类特殊实体类型
- 现代汉语文本,尤其是网络文本,常出现中英文交替使用,此时汉语命名实体识别的任务还包括识别其中的英文命名实体
- 不同的命名实体具有不同的内部特征,不可能用一个统一的模型来刻画所有的实体内部特征
- 现代汉语日新月异的发展给命名实体识别也带来了新的困难:(1)标注语料老旧,覆盖不全。譬如说,近年来起名字的习惯用字与以往相比有很大的变化,以及各种复姓识别、国外译名、网络红人、流行用语、虚拟人物和昵称的涌现。(2)命名实体歧义严重,消歧困难
方法

基于规则和字典的方法
基于规则的方法多采用语言学专家手工构造规则模板,选用特征包括统计信息、标点符号、关键字、指示词和方向词、位置词(如尾字)、中心词等方法,以模式和字符串相匹配为主要手段,这类系统大多依赖于知识库和词典的建立。
基于规则和词典的方法是命名实体识别中最早使用的方法,它们依赖于手工规则的系统,都使用命名实体库,而且对每一个规则都赋予权值。当遇到规则冲突的时候,选择权值最高的规则来判别命名实体的类型。一般而言,当提取的规则能比较精确地反映语言现象时,基于规则的方法性能要优于基于统计的方法。但基于规则和字典的方法也有其缺陷:
- 规则往往依赖于具体语言、领域和文本风格,制定规则的过程耗时且难以涵盖所有的语言,特别容易产生错误,系统可移植性差,对于不同的系统需要语言学专家重新书写规则
- 代价太大,存在系统建设周期长、需要建立不同领域知识库作为辅助以提高系统识别能力等问题
基于统计学习的方法
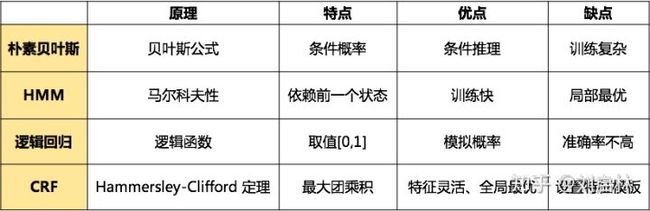
基于统计机器学习的方法主要包括:**隐马尔可夫模型(Hidden Markov Moder, HMM)、最大熵模型(Maximum Entropy Model, MEM)、支持向量机(Support Vector Machine, SVM)、条件随机场(Conditional Random Field, crf)**等等。在基于机器学习的方法中,NER被当作序列标注问题。利用大规模语料来学习出标注模型,从而对句子的各个位置进行标注。NER 任务中的常用模型包括生成式模型HMM、判别式模型crf等。条件随机场(Conditional Random Field,crf)是NER目前的主流模型。
隐马尔可夫模型
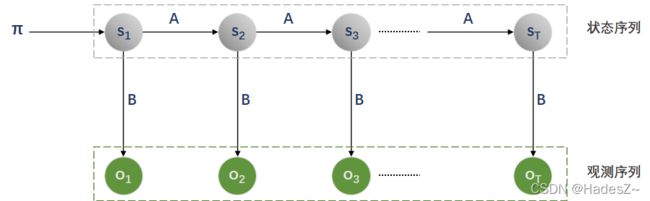
隐马尔科夫模型(hidden Markov model,HMM),描述由一个隐藏的马尔科夫链随机生成不可观测的状态随机序列,再由各个状态(state)生成一个观测(observation)从而产生观测随机序列的过程。隐藏的马尔科夫链随机生成的状态的序列,称作状态序列(state sequence), 它是模型的标签(target);每个状态生成一个观测而产生的观测的随机序列,称为观测序列(observation sequence),它是模型的特征(features)。序列的每一个位置又可以看作是一个时刻。
马尔科夫链
有几种状态之间存在互相转换的概率
想推算出 x 1 → x 2 → x 3 x_1 \to x_2 \to x_3 x1→x2→x3的概率
这条链通常称为马尔可夫链
求解通常是利用 P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 1 , x 2 ) P(x_1)P(x_2|x_1)P(x_3|x_1,x_2) P(x1)P(x2∣x1)P(x3∣x1,x2)条件概率进行求解
隐马尔可夫模型
我们需要计算的东西不能直接获取其概率转化图
是根据另一种我们可见的观测东西去推算另一种东西
HMM五元组:
- 观测序列-O (能获取的指标) M 个 观 测 值 M个观测值 M个观测值
- 状态序列-I (需要计算的指标) N N N个状态
- 初始状态概率向量- π \pi π 初始时刻的概率 π 1 ∗ N \pi_{1*N} π1∗N
- 状态转移概率矩阵- A A A 状态到状态的转移关系 A N ∗ N A_{N*N} AN∗N
- 观测概率矩阵- B B B 状态转移到观测 B N ∗ M B_{N*M} BN∗M
两个基本假设:
齐次马尔可夫性假设:(状态只依赖于前一个时刻的状态)
P ( i t ∣ i t − 1 , o t − 1 … , i 1 , o 1 ) = P ( i t ∣ i t − 1 ) , t = 1 , 2 , … , T P(i_t|i_{t-1},o_{t-1}\dots,i_1,o_1)=P(i_t|i_{t-1}),t=1,2,\dots,T \\ P(it∣it−1,ot−1…,i1,o1)=P(it∣it−1),t=1,2,…,T
观测独立性假设:(观测只依赖于当前时刻的状态)
P ( o t ∣ i t , o t , i t − 1 , o t − 1 … i 1 , o 1 ) = P ( o t ∣ i t ) P(o_t|i_t,o_t,i_{t-1},o_{t-1}\dots i_1,o_1)=P(o_t|i_t) P(ot∣it,ot,it−1,ot−1…i1,o1)=P(ot∣it)
四面体、六面体、八面体的例子
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z0iMofqS-1648284595079)(HMM.png)]
HMM三类问题:
- 概率计算问题
给定模型 λ = ( π , A , B ) \lambda=(\pi,A,B) λ=(π,A,B)和观测序列O的情况下,求 P ( O ∣ λ ) P(O|\lambda) P(O∣λ)出现的概率(前向-后向算法)
-
- 前向概率计算
α t ( i ) = P ( o 1 , o 2 , … , o t , i t = q i ∣ λ ) = ∑ j = 1 N P ( i t − 1 = q j , i t = q i , o 1 t − 1 ) = ∑ j = 1 N P ( i t = q i , o t ∣ i t − 1 = q j , o 1 t − 1 ) ⋅ P ( i t − 1 = q j , o 1 t − 1 ) = ∑ j = 1 N P ( i t = q i , o t ∣ i t − 1 = q j ) ⋅ α t − 1 ( j ) = ∑ j = 1 N P ( o t ∣ i t = q i , i t − 1 = q j ) ⋅ P ( i t = q i ∣ i t − 1 = q j ) ⋅ α t − 1 ( j ) = ∑ j = 1 N b i ( o i ) ⋅ a j i ⋅ α t − 1 ( j ) \alpha_t(i)=P(o_1,o_2,\dots,o_t,i_t=q_i|\lambda) \\ =\sum\limits_{j=1}^NP(i_{t-1}=q_j,i_t=q_i,o_1^{t-1}) \\ =\sum\limits_{j=1}^NP(i_t=q_i,o_t|i_{t-1}=q_j,o_1^{t-1})\cdot P(i_{t-1}=q_j,o_1^{t-1}) \\ =\sum\limits_{j=1}^NP(i_t=q_i,o_t|i_{t-1}=q_j)\cdot \alpha_{t-1}(j)\\ =\sum\limits_{j=1}^NP(o_t|i_t=q_i,i_{t-1}=q_j) \cdot P(i_t=q_i|i_{t-1}=q_j) \cdot \alpha_{t-1}(j) \\ =\sum\limits_{j=1}^N b_i(o_i)\cdot a_{ji}\cdot \alpha_{t-1}(j) αt(i)=P(o1,o2,…,ot,it=qi∣λ)=j=1∑NP(it−1=qj,it=qi,o1t−1)=j=1∑NP(it=qi,ot∣it−1=qj,o1t−1)⋅P(it−1=qj,o1t−1)=j=1∑NP(it=qi,ot∣it−1=qj)⋅αt−1(j)=j=1∑NP(ot∣it=qi,it−1=qj)⋅P(it=qi∣it−1=qj)⋅αt−1(j)=j=1∑Nbi(oi)⋅aji⋅αt−1(j)
-
- 概率计算
P ( O ∣ λ ) = P ( o 1 T ∣ λ ) = ∑ i = 1 N P ( o 1 T , i T = q i ) = ∑ i = 1 N α T ( i ) P(O|\lambda) = P(o_1^T|\lambda) \\ =\sum\limits_{i=1}^NP(o_1^T,i_T=q_i) \\ =\sum\limits_{i=1}^N \alpha_T(i) P(O∣λ)=P(o1T∣λ)=i=1∑NP(o1T,iT=qi)=i=1∑NαT(i)
-
- 前向概率算法:
输入:隐马尔可夫模型 λ \lambda λ和观测序列 O O O
输出:观测序列概率 P ( O ∣ λ ) P(O|\lambda) P(O∣λ)
- 初值 α t ( i ) = π i b i ( o 1 ) \alpha_t(i)=\pi_ib_i(o_1) αt(i)=πibi(o1) t = 1 , 2 , … , N t = 1,2,\dots,N t=1,2,…,N
- 递推:对 t = 1 , 2 , … , T − 1 t=1,2,\dots,T-1 t=1,2,…,T−1 α t + 1 ( i ) = ∑ j = 1 N b i ( o i + 1 ⋅ a j i ⋅ α t ( j ) ) \alpha_{t+1}(i)=\sum\limits_{j=1}^Nb_i(o_{i+1} \cdot a_{ji} \cdot \alpha_t(j)) αt+1(i)=j=1∑Nbi(oi+1⋅aji⋅αt(j))
- 终止: P ( O ∣ λ ) = ∑ j = 1 N α T ( i ) P(O|\lambda)=\sum\limits_{j=1}^N \alpha_T(i) P(O∣λ)=j=1∑NαT(i)
后向概率也是类似,从当前式子根据全概率公式展开,得到递推公式进行迭代
- 解码问题
给定模型 λ = ( π , A , B ) \lambda=(\pi,A,B) λ=(π,A,B)和观测序列O的情况下,求对给定观测序列条件概率 P ( I ∣ O ) P(I|O) P(I∣O)最大的状态序列I。即给定观测序列,求最有可能的对应状态序列(Viterbi算法)
定义两个矩阵
KaTeX parse error: Undefined control sequence: \var at position 1: \̲v̲a̲r̲是(序列长度,状态数量)形状的矩阵,每一行是一个时刻,每一列是由该状态输出的概率
KaTeX parse error: Undefined control sequence: \var at position 1: \̲v̲a̲r̲ ̲\ [0,0]表示时刻0,由状态0输出结果的概率
ϕ \phi ϕ里记录最有可能的路径
ϕ [ 1 , 0 ] \phi[1,0] ϕ[1,0]表示哪一个时刻0的状态最有可能转移到时刻1的状态0
- 学习问题
观测序列O已知的情况下,将状态序列作为隐数据I,求解 λ = ( π , A , B ) \lambda=(\pi,A,B) λ=(π,A,B)参数,使得在该模型下观测序列概率 P ( O ∣ λ ) P(O|\lambda) P(O∣λ)最大(极大似然估计算法)
方法
通过大量实验,能得出观测和状态序列。
逆推,通过第0位得出初始向量
统计次数之后,得出状态转移矩阵。
观测概率同理也可以求出来
最大熵模型
最大熵原理:首先满足已有的事实,在没有更多信息的情况下,那些不确定的部份都是“等可能的”
H ( p ) = − ∑ p ( x ) log p ( x ) H(p)=-\sum p(x)\log p(x) H(p)=−∑p(x)logp(x)
max p ( x ) H \max\limits_{p(x)}H p(x)maxH
0 ≤ H ( p ) ≤ log ∣ X ∣ 0 \le H(p) \le \log|X| 0≤H(p)≤log∣X∣
EM算法
EM 算法,全称 Expectation Maximization Algorithm。期望最大算法是一种迭代算法,用于含有隐变量(Hidden Variable)的概率参数模型的最大似然估计或极大后验概率估计。
EM 算法的核心思想非常简单,分为两步:Expection-Step 和 Maximization-Step。E-Step 主要通过观察数据和现有模型来估计参数,然后用这个估计的参数值来计算似然函数的期望值;而 M-Step 是寻找似然函数最大化时对应的参数。由于算法会保证在每次迭代之后似然函数都会增加,所以函数最终会收敛。
核心思想是随机估计参数 θ \theta θ的值
用参数值和原始结果反过来计算新一轮的结果。
然后用极大似然反过来估计 θ A \theta_A θA和 θ B \theta_B θB。
直至参数收敛
不完全数据:观测随机变量Y —》 O
完全数据:观测随机变量 Y Y Y和隐随机变量 Z Z Z -------》 I
含有隐变量 Z Z Z的概率模型,目标是极大化观测变量Y关于参数 θ \theta θ的对数似然函数, 即 max θ L ( θ ) \max\limits_{\theta} L(\theta) θmaxL(θ)
L ( θ ) = log P ( Y ∣ θ ) = log ∑ Z P ( Y , Z ∣ θ ) = log ( ∑ Z P ( Y ∣ Z , θ ) P ( Z ∣ θ ) ) L(\theta)=\log P(Y|\theta) \\ =\log \sum\limits_Z P(Y,Z | \theta) \\ =\log(\sum\limits_Z P(Y|Z,\theta)P(Z|\theta)) L(θ)=logP(Y∣θ)=logZ∑P(Y,Z∣θ)=log(Z∑P(Y∣Z,θ)P(Z∣θ))
对数似然函数 L ( θ ) L(\theta) L(θ)与第 i i i次迭代后的对数似然函数 L ( θ ( i ) ) L(\theta^{(i)}) L(θ(i))的差
L ( θ ) − L ( θ ( i ) ) = log ( ∑ Z P ( Y ∣ Z , θ ) P ( Z ∣ θ ) ) − log P ( Y ∣ θ ( i ) ) = log ( ∑ Z P ( Z ∣ Y , θ ( i ) ) ) P ( Y ∣ Z , θ ) P ( Z ∣ θ ) P ( Z ∣ Y , θ ( i ) ) − log P ( Y ∣ θ ( i ) ) ≥ ∑ Z P ( Z ∣ Y , θ ( i ) ) log P ( Y ∣ Z , θ ) P ( Z ∣ θ ) P ( Z ∣ Y , θ ( i ) ) P ( Y ∣ θ ( i ) ) L(\theta)-L(\theta^{(i)})=\log (\sum\limits_{Z}P(Y|Z,\theta) P(Z|\theta) ) - \log P(Y|\theta^{(i)}) \\ = \log(\sum\limits_{Z}P(Z|Y,\theta^{(i)}))\frac{P(Y|Z,\theta)P(Z|\theta)}{P(Z|Y,\theta^{(i)})}-\log P(Y|\theta^{(i)}) \\ \ge \sum\limits_ZP(Z|Y,\theta^{(i)})\log \frac{P(Y|Z,\theta)P(Z|\theta)}{P(Z|Y,\theta^{(i)})P(Y|\theta^{(i)})} L(θ)−L(θ(i))=log(Z∑P(Y∣Z,θ)P(Z∣θ))−logP(Y∣θ(i))=log(Z∑P(Z∣Y,θ(i)))P(Z∣Y,θ(i))P(Y∣Z,θ)P(Z∣θ)−logP(Y∣θ(i))≥Z∑P(Z∣Y,θ(i))logP(Z∣Y,θ(i))P(Y∣θ(i))P(Y∣Z,θ)P(Z∣θ)
CRF
条件随机场
随机过程
设 T T T是一无限实数集,把依赖于参数 t ∈ T t \in T t∈T的一族(无限多个)随机变量称为随机过程,记为 { X ( t ) , t ∈ T } \{X(t),t \in T\} {X(t),t∈T}
随机场
若 T T T是 n n n维空间的某个子集,即 t t t是一个 n n n维向量,此时随机过程又称为条件随机场
相当于从平面映射到向量空间
马尔可夫随机场(概率无向图模型)
具有马尔可夫性的随机场
马尔可夫性:
P ( Y v ∣ X , Y w , w ≠ v ) = P ( Y v ∣ X , Y w , w − v ) P(Y_v|X,Y_w,w\ne v) = P(Y_v|X,Y_w,w-v) P(Yv∣X,Yw,w=v)=P(Yv∣X,Yw,w−v)
其中:
w − v w-v w−v表示在图 G ( V , E ) G(V,E) G(V,E)中与顶点v有边连接的所有顶点w
w ≠ v w\ne v w=v表示顶点 v v v以外的所有顶点
Y V Y_V YV与 Y W Y_W YW为顶点v与w的随机变量
团和最大团
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GMyGjqTr-1648284595081)(img/square.png)]
先考虑只有一条对角线的正方形,四个顶点为 Y 1 , Y 2 , Y 3 , Y 4 Y_1,Y_2,Y_3,Y_4 Y1,Y2,Y3,Y4。在 Y 2 , Y 3 Y_2,Y_3 Y2,Y3上连接了一条对角线
马尔可夫性: P ( Y 1 , Y 4 ∣ Y 3 , Y 2 ) = P ( Y 1 ∣ Y 2 , Y 3 ) × P ( Y 4 ∣ Y 2 , Y 3 ) P(Y_1,Y_4|Y_3,Y_2)=P(Y_1|Y_2,Y_3) \times P(Y_4|Y_2,Y_3) P(Y1,Y4∣Y3,Y2)=P(Y1∣Y2,Y3)×P(Y4∣Y2,Y3)
由马尔可夫性推导如下: P ( Y 1 , Y 2 , Y 3 ) ∗ P ( Y 2 , Y 3 , Y 4 ) / P ( Y 2 , Y 3 ) = P ( Y 1 , Y 2 , Y 3 , Y 4 ) P(Y_1,Y_2,Y_3) * P(Y_2,Y_3,Y_4) / P(Y_2,Y_3)=P(Y_1,Y_2,Y_3,Y_4) P(Y1,Y2,Y3)∗P(Y2,Y3,Y4)/P(Y2,Y3)=P(Y1,Y2,Y3,Y4)
此时,称 P ( Y 1 , Y 2 , Y 3 ) , P ( Y 2 , Y 3 , Y 4 ) P(Y_1,Y_2,Y_3) , P(Y_2,Y_3,Y_4) P(Y1,Y2,Y3),P(Y2,Y3,Y4)为最大团
团:两个节点在图中相邻
最大团:里面所有节点都是两两相连,并且不能扩展
P ( Y 2 , Y 3 ) = ∑ P ( Y 1 , Y 4 ∣ Y 2 , Y 3 ) = ∑ P ( Y 1 , Y 2 , Y 3 ) P ( Y 2 , Y 3 , Y 4 ) P(Y_2,Y_3)=\sum P(Y_1,Y_4|Y_2,Y_3)=\sum P(Y_1,Y_2,Y_3)P(Y_2,Y_3,Y_4) P(Y2,Y3)=∑P(Y1,Y4∣Y2,Y3)=∑P(Y1,Y2,Y3)P(Y2,Y3,Y4)
so P ( Y 1 , Y 2 , Y 3 , Y 4 ) = P ( Y 1 , Y 2 , Y 3 ) ∗ P ( Y 2 , Y 3 , Y 4 ) ∑ P ( Y 1 , Y 2 , Y 3 ) ∗ P ( Y 2 , Y 3 , Y 4 ) P(Y_1,Y_2,Y_3,Y_4)=\frac{P(Y_1,Y_2,Y_3)*P(Y_2,Y_3,Y_4)}{\sum P(Y_1,Y_2,Y_3)*P(Y_2,Y_3,Y_4)} P(Y1,Y2,Y3,Y4)=∑P(Y1,Y2,Y3)∗P(Y2,Y3,Y4)P(Y1,Y2,Y3)∗P(Y2,Y3,Y4)
令最大团的概率为 ϕ 1 , ϕ 2 \phi_1,\phi_2 ϕ1,ϕ2
P ( Y 1 , Y 2 , Y 3 , Y 4 ) = ϕ 1 ϕ 2 ∑ ϕ 1 ϕ 2 P(Y_1,Y_2,Y_3,Y_4)=\frac{\phi_1\phi_2}{\sum \phi_1\phi_2} P(Y1,Y2,Y3,Y4)=∑ϕ1ϕ2ϕ1ϕ2
可以推导到无限维的情况下
概率无向图模型的因子分解
给定概率无向图模型,设其无向图为G,C为G上的最大团, Y C Y_C YC表示C对应的随机变量,那么概率无向图模型的联合概率分布 P ( Y ) P(Y) P(Y)可写作图中所有最大团C上的函数 φ C ( Y C ) \varphi_C(Y_C) φC(YC)的乘积形式
P ( Y ) = 1 Z ∏ C φ C ( Y C ) P(Y)=\frac{1}{Z}\prod\limits_C\varphi_C(Y_C) P(Y)=Z1C∏φC(YC)
Z = ∑ ∑ C φ C ( Y C ) Z=\sum \sum\limits_C \varphi_C(Y_C) Z=∑C∑φC(YC)
条件随机场定义
设 X X X与 Y Y Y是随机变量, P ( Y ∣ X ) P(Y|X) P(Y∣X)是在给定 X X X的条件 Y Y Y的条件概率分布
若随机变量 Y Y Y构成一个由无向图 G = ( V , E ) G=(V,E) G=(V,E)表示的马尔可夫随机场,即
P ( Y V ∣ X , Y W , w ≠ v ) = P ( Y V ∣ X , Y W , w − v ) P(Y_V|X,Y_W,w\ne v)=P(Y_V|X,Y_W,w-v) P(YV∣X,YW,w=v)=P(YV∣X,YW,w−v)对任意顶点 v v v成立,则称条件概率分布 P ( Y ∣ X ) P(Y|X) P(Y∣X)为条件随机场
对应到线性链的条件随机场
- HMM模型(最大团为两个顶点的集合)
在命名实体识别中,观测序列为句子中的一个个单词,状态序列为词性
最大团为三角形
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Pv00HWLE-1648284595082)(img/link.png)]
线性链条件随机场公式
设 P ( y ∣ x ) = 1 Z ( x ) e x p ( ∑ i , k λ k t k ( y i − 1 , y i , x , i ) + ∑ i , l u l s l ( y i , x , i ) ) P(y|x)=\frac{1}{Z(x)}exp(\sum\limits_{i,k}\lambda_kt_k(y_{i-1,y_i,x,i})+\sum\limits_{i,l}u_ls_l(y_i,x,i)) P(y∣x)=Z(x)1exp(i,k∑λktk(yi−1,yi,x,i)+i,l∑ulsl(yi,x,i))
其中: Z ( x ) = ∑ y e x p ( ∑ i , k λ k t k ( y i − 1 , y i , x , i ) + ∑ i , l u l s l ( y i , x , i ) ) Z(x)=\sum\limits_yexp(\sum\limits_{i,k}\lambda_kt_k(y_{i-1},y_i,x,i)+\sum\limits_{i,l}u_ls_l(y_i,x,i)) Z(x)=y∑exp(i,k∑λktk(yi−1,yi,x,i)+i,l∑ulsl(yi,x,i))
t k , s l t_k,s_l tk,sl:特征函数
λ k , u l \lambda_k,u_l λk,ul:对应权值
Z ( x ) Z(x) Z(x):归一化因子
CRF应用
中文分词
观测序列:句子
状态序列:词位序列
BMES:(B词首,M词中,E词尾,S独立词)
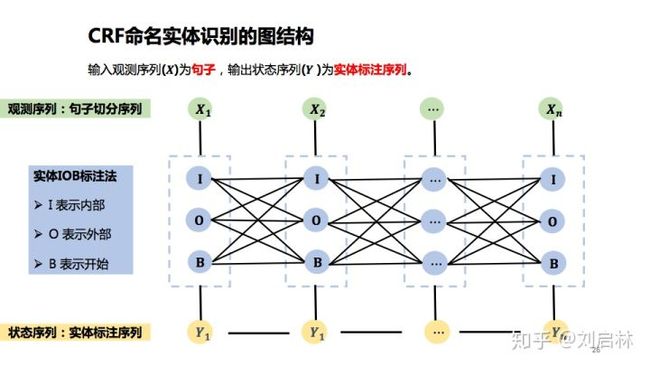
命名实体识别
- 词的实体标注
首先把句子进行原子切分,然后对字(词)进行实体标注
- 确定特征函数
接着,确定特征模板。一般采用当前位置的前后n个位置上的词
f ( y w 0 s n x w 0 s n ) = 1 o r 0 f(y_{w_0sn}x_{w_0sn})=1 \ or \ 0 f(yw0snxw0sn)=1 or 0
- 模型训练
训练CRFF模型参数
P ( y ∣ x ) = 1 Z ( x ) e x p ∑ k = 1 K w k f k ( f , x ) P(y|x)=\frac{1}{Z(x)}exp\sum\limits_{k=1}^Kw_kf_k(f,x) P(y∣x)=Z(x)1expk=1∑Kwkfk(f,x)

Z ( x ) Z(x) Z(x):归一化因子
CRF应用
中文分词
观测序列:句子
状态序列:词位序列
BMES:(B词首,M词中,E词尾,S独立词)
命名实体识别
- 词的实体标注
首先把句子进行原子切分,然后对字(词)进行实体标注
- 确定特征函数
接着,确定特征模板。一般采用当前位置的前后n个位置上的词
f ( y w 0 s n x w 0 s n ) = 1 o r 0 f(y_{w_0sn}x_{w_0sn})=1 \ or \ 0 f(yw0snxw0sn)=1 or 0
- 模型训练
训练CRFF模型参数
P ( y ∣ x ) = 1 Z ( x ) e x p ∑ k = 1 K w k f k ( f , x ) P(y|x)=\frac{1}{Z(x)}exp\sum\limits_{k=1}^Kw_kf_k(f,x) P(y∣x)=Z(x)1expk=1∑Kwkfk(f,x)
[外链图片转存中…(img-oVizfmFh-1648284595083)]
[外链图片转存中…(img-oAFFYt27-1648284595084)]