Distributed physics informed neural network for data-efficient solution to PDE
论文信息
题目:Distributed physics informed neural network for data-efficient solution to partial differential equations
作者:Vikas Dwivedia,∗, Nishant Parasharb, Balaji Srinivasana
基础补充
内容
动机
动机:
- 传统it is a well-known fact that mesh generation is a very difficult task with complex geometries. Furthermore, the discretisation of the PDE itself introduces
truncation errors, which can be a quite serious problem - 对于单个PINN在整个域上表示复杂函数很困难
PINN的缺陷:
- PINNs在表示较宽计算域内的急剧局部梯度时不够稳健
- 要求PINN的深度随着PDE阶数的增加而增加,由于众所周知的消失梯度问题,导致学习速率变慢,
方法:
受有限体积方法的灵感,考虑将求解域分成多个cell,在每个cell建立一个PINN,不同cell之间加一个连续与可微约束。具体表示:
考虑下面的一维非定常问题
∂ ∂ t u ( x , t ) + N u ( x , t ) = R ( x , t ) , ( x , t ) ∈ Ω u ( x , t ) = B ( x , t ) , ( x , t ) ϵ ∂ Ω u ( x , 0 ) = F ( x ) , x ϵ [ x L , x R ] \begin{array}{c} \frac{\partial}{\partial t} u(x, t)+\mathscr{N} u(x, t)=R(x, t),(x, t) \in \Omega \\ u(x, t)=B(x, t),(x, t) \epsilon \partial \Omega \\ u(x, 0)=F(x), x \epsilon\left[x_{L}, x_{R}\right] \end{array} ∂t∂u(x,t)+Nu(x,t)=R(x,t),(x,t)∈Ωu(x,t)=B(x,t),(x,t)ϵ∂Ωu(x,0)=F(x),xϵ[xL,xR]
其中,矩形域 Ω = [ x L , x R ] x [ 0 , T ] \Omega=\left[x_{L}, x_{R}\right] \mathrm{x}[0, T] Ω=[xL,xR]x[0,T],统一将 Ω \Omega Ω分程不重叠的矩形cell。
Ω = ⋃ i = 1 N c Ω i \Omega=\bigcup_{i=1}^{N_{c}} \Omega_{i} Ω=i=1⋃NcΩi
每个cell Ω i \Omega_{i} Ωi的边界表示为 ∂ Ω i \partial \Omega_{i} ∂Ωi,对于矩形区域
∂ Ω i = ⋃ m = 1 4 I m ( i ) \partial \Omega_{i}=\bigcup_{m=1}^{4} I_{m}^{(i)} ∂Ωi=m=1⋃4Im(i)
其中, I m ( i ) I_{m}^{(i)} Im(i)表示 Ω i \Omega_{i} Ωi第 m t h m^{t h} mth界面


第i个cell表示为 M ( i ) M^{(i)} M(i),每个 M ( i ) M^{(i)} M(i)输出为 f ( i ) f^{(i)} f(i),对于每个 M ( i ) M^{(i)} M(i),附加一个额外连续(或光滑)的限制。例如,对于平流问题,解的连续性是充分的。对于扩散问题,解应该是连续可微的。每个神经网络损失:
J = J P D E + J B C + J I C + J interface J=J_{P D E}+J_{B C}+J_{I C}+J_{\text {interface}} J=JPDE+JBC+JIC+Jinterface
前三个与传统PINN相同,最后一个loss
J P D E = ∑ ξ ⃗ f ( i ) T ξ ⃗ f ( i ) 2 N f ( i ) J_{P D E}=\sum \frac{\vec{\xi}_{f}^{(i)^{T} \vec{\xi}_{f}}(i)}{2 N_{f}^{(i)}} JPDE=∑2Nf(i)ξf(i)Tξf(i)
J B C = ∑ ξ ⃗ b c ( j ) ξ ⃗ b c ( j ) 2 N b c ( j ) + ∑ ξ ⃗ b c ( k ) T ξ ⃗ b c ( k ) 2 N b c ( k ) J_{B C}=\sum \frac{\vec{\xi}_{b c}^{(j)} \vec{\xi}_{b c}^{(j)}}{2 N_{b c}^{(j)}}+\sum \frac{\vec{\xi}_{b c}^{(k)^{T}} \vec{\xi}_{b c}^{(k)}}{2 N_{b c}^{(k)}} JBC=∑2Nbc(j)ξbc(j)ξbc(j)+∑2Nbc(k)ξbc(k)Tξbc(k)
J I C = ∑ ξ ⃗ i c ( l ) ξ ⃗ i c ( l ) 2 N i c ( l ) J_{I C}=\sum \frac{\vec{\xi}_{i c}^{(l)} \vec{\xi}_{i c}^{(l)}}{2 N_{i c}^{(l)}} JIC=∑2Nic(l)ξic(l)ξic(l)
其中, ξ ⃗ f ( i ) = ( ∂ f ⃗ ( i ) ∂ t + L f ⃗ ( i ) − R ⃗ ( i ) ) Ω i , ξ ⃗ b c ( j ) = ( f ⃗ ( j ) − B ⃗ ( j ) ) I 4 , ξ ⃗ b c ( k ) = ( f ⃗ ( k ) − B ⃗ ( k ) ) I 2 , ξ ⃗ i c ( l ) = ( f ⃗ ( l ) − B ⃗ ( l ) ) I 1 \vec{\xi}_{f}^{(i)}=\left(\frac{\partial \vec{f}^{(i)}}{\partial t}+\mathcal{L} \vec{f}^{(i)}-\vec{R}^{(i)}\right)_{\Omega_{i}}, \vec{\xi}_{b c}^{(j)}=\left(\vec{f}^{(j)}-\vec{B}^{(j)}\right)_{I_{4}}, \vec{\xi}_{b c}^{(k)}=\left(\vec{f}^{(k)}-\vec{B}^{(k)}\right)_{I_{2}},\vec{\xi}_{i c}^{(l)}=\left(\vec{f}^{(l)}-\vec{B}^{(l)}\right)_{I_{1}} ξf(i)=(∂t∂f(i)+Lf(i)−R(i))Ωi,ξbc(j)=(f(j)−B(j))I4,ξbc(k)=(f(k)−B(k))I2,ξic(l)=(f(l)−B(l))I1
i = [ 1 , 2 , … , N c ] , j = [ 1 , ( 1 + N B x ) , … , ( 1 + ( N B t − 1 ) N B x ) ] , k = [ N B x , 2 N B x , … , N B t × N B x ] , l = [ 1 , 2 , … , N B x ] i=\left[1,2, \ldots, N_{c}\right], j=\left[1,\left(1+N B_{x}\right), \ldots,\left(1+\left(N B_{t}-1\right) N B_{x}\right)\right], k=\left[N B_{x}, 2 N B_{x}, \ldots, N B_{t} \times N B_{x}\right],l=\left[1,2, \ldots, N B_{x}\right] i=[1,2,…,Nc],j=[1,(1+NBx),…,(1+(NBt−1)NBx)],k=[NBx,2NBx,…,NBt×NBx],l=[1,2,…,NBx]
最后一项 J interface J_{\text {interface}} Jinterface作为连续性损失和可微性损失
J interface = J C x 0 + J C t 0 + J C 2 J_{\text {interface}}=J_{C_{x}^{0}}+J_{C_{t}^{0}}+J_{C_{2}} Jinterface=JCx0+JCt0+JC2
J C x 0 , J C t 0 J_{C_{x}^{0}}, J_{C_{t}^{0}} JCx0,JCt0对应x,t的连续损失, J C x 1 J_{C_{x}^{1}} JCx1对应着微分损失,
J C x 0 = ∑ ξ ⃗ C x 0 ( i ) T ξ ⃗ C x 0 2 N C 0 ( i ) J_{C_{x}^{0}}=\sum \frac{\vec{\xi}_{C_{x}^{0}}^{(i)^{T} \vec{\xi}_{C_{x}^{0}}}}{2 N_{C^{0}}^{(i)}} JCx0=∑2NC0(i)ξCx0(i)TξCx0
J C t 0 = ∑ ξ ⃗ C t 0 ( i ) T ξ ⃗ C t 0 2 N C 0 ( i ) J C x 1 = ∑ ξ ⃗ C x 1 ( i ) T ξ ⃗ C x 1 2 N C x 1 ( i ) , \begin{aligned} J_{C_{t}^{0}} &=\sum \frac{\vec{\xi}_{C_{t}^{0}}^{(i)^{T} \vec{\xi}_{C_{t}^{0}}}}{2 N_{C^{0}}^{(i)}} \\ J_{C_{x}^{1}} &=\sum \frac{\vec{\xi}_{C_{x}^{1}}^{(i)^{T} \vec{\xi}_{C_{x}^{1}}}}{2 N_{C_{x}^{1}}^{(i)}}, \end{aligned} JCt0JCx1=∑2NC0(i)ξCt0(i)TξCt0=∑2NCx1(i)ξCx1(i)TξCx1,
其中
实验
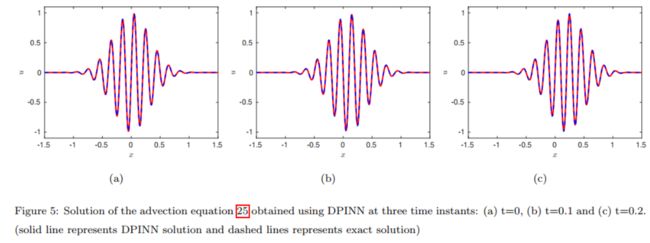
Advection equation
PINN对于这种类型的复杂表示,我们需要在梯度较大的区域中使用大量的训练数据,然而,这些信息是我们先天不知道的,传统PINN的代价函数作为一个正则化器,但仅在全局意义上。因此,该算法很难在较宽的计算范围内捕获这些明显的局部变化,然而,使用更深层次的网络可能会限制训练速度,因为一个众所周知的问题是梯度消失。DPINN在每个cell上采相同数量的点,比起传统PINN随机采点更能获取更多信息,每个cell上使用更简单的MLP
Burgers’ equation

结论
在本文中,我们提出了DPINN -一个数据高效的分布式版本的PINN,以解决线性和非线性偏微分方程。该算法通过改进网络结构和学习算法,提高了PINN的性能。DPINN通过将计算域划分为更小的子域,结合了一种类似于有限体积方法的分治型策略(称为单元),并在每个单元中构建PINN。这种划分将可能需要非常深的PINN的困难问题分解为更小的子问题,这些子问题可以通过各种最小大小的局部PINN来解决。接口上附加的物理约束充当自然的网络正则化器,提高了网络的表示能力。DPINN本身的代价函数将单个的局部PINN解stitches起来,使得DPINN比原始PINN更具数据效率。