基于matlab的sfm三维重建
基于matlab的sfm三维重建
想学习三维重建,但是不会c++语言,python调用opencv弄得我头大,正好matlab上也有三维重建的代码,于是编跟着案例库的案例倒弄了一阵,大致弄明白了,分享一个流程给新手做参考。
ps:几个周以后再看自己做的这个,都是啥玩意,我都不好意思看了,事实上这个算不上稠密重建,纹理映射没有,由于手机是双摄标定出来也不准确,导致三角测量时相机位置偏的太多,在之后点云拼接的时候是一团乱麻,根本拼不上,毕竟新手起步,等我把整个完整流程弄完了再来分享。
1,加载图像和相机标定
相机参数需要先标定相机,matlab带有一个相机标定工具箱,很简单。一开始想做无标定三维重建的,但是方法我没找到。
本方法重建效果主要取决于三点:图像质量,相机校正好坏,特征匹配方法。
imageDir = fullfile('D:','picture','box'); % 这里输入路径,我重建的对象是一个盒子
imds = imageDatastore(imageDir);
load('calibrationSession'); % 加载相机参数,这个是matlab标定工具箱标定好后保存的mat文件
cameraParams = calibrationSession.CameraParameters; %我们需要的是CameraParameters
将图像都转化为灰度图,特征检测只能检测灰度图。
images = cell(1, numel(imds.Files));
for i = 1:numel(imds.Files) % 图片的数量
I = readimage(imds, i);
images{i} = rgb2gray(I);
end
实验室的盒子,一共拍摄了16张图片

2、创建图像追踪和配置颜色模板
创建图像追踪,原理就是先检测第一张图片所有的特征点,然后设置一个追踪器tracker,和图像管理器vSet,在剩下图片中追踪该特征点,然后储存在vSet中,同时vSet还储存相机位置等。(vSet貌似不能储存颜色信息,所以我才把颜色单独弄出来)
以第一二张图为基准读取点云信息,用于后面的颜色匹配。
I1 = readimage(imds, 1);% 读取第1张图片
I2 = images{2}; % 这里读取的不是灰度图
[currPoints, validIdx] = step(tracker, I2);
matchedPoints = PrevPoints(validIdx, :);
特征检测,最小特征值检测方法,速度稍慢,特征多,surf特征检测方法,速度快,检测特征少,KAZE很慢,列出来的原因是因为matlab没自带sift。
I = images{1}; % 选择第一张灰度图像
prevPoints = detectMinEigenFeatures(I, 'MinQuality', 0.001,'FilterSize', 5);
% prevPoints = detectSURFFeatures(I,'MetricThreshold',5,'NumScaleLevels',6);
% prevPoints = detectKAZEFeatures(I,'Diffusion','region','Threshold',...
% 0.00001,'NumOctaves',4,'NumScaleLevels',5);
创建追踪器来追踪特征点
tracker = vision.PointTracker('MaxBidirectionalError', 1, 'NumPyramidLevels',...
6,'BlockSize',[31,31]);
% 初始化点跟踪器。
PrevPoints = prevPoints.Location;
initialize(tracker, PrevPoints, I);
将检测出来的点存放在vSet中
vSet = viewSet; % matlab自带的视图管理器
viewId = 1;
vSet = addView(vSet, viewId, 'Points', prevPoints, 'Orientation', ...
eye(3, 'like', PrevPoints), 'Location', ...
zeros(1, 3, 'like', PrevPoints));
MinEigen最小特征法检测的稠密点匹配(8w多个点)

kaze特征检测的稠密点(4w多个点)。

3、重建主流程
这里不分稀疏重建和稠密重建,根据特征检测时把对应参数调高或者调低,来控制稀疏还是稠密。
注意,我这里只重建第一张图所包含的内容!!!
在这里追踪器开始产生作用
for i = 2:numel(images)
I = images{i};
[currPoints, validIdx] = step(tracker, I); %追踪第i张图片的特征点,返回特征点和点的对应关系
matchedPoints1 = PrevPoints(validIdx, :); % 筛选出来的匹配点
matchedPoints2 = currPoints(validIdx, :);
[E, epipolarInliers] = estimateEssentialMatrix(matchedPoints1,...
matchedPoints2,cameraParams);
%警告:已达到最大审判次数。考虑增加最大距离或降低期望的信心。
inlierPoints1 = matchedPoints1(epipolarInliers, :);
inlierPoints2 = matchedPoints2(epipolarInliers, :);
[orient, loc] = relativeCameraPose(E, cameraParams,...
inlierPoints1,inlierPoints2);
% 将当前视图匹配添加到视图集
vSet = addView(vSet, i, 'Points', currPoints);
% 存储上一个视图和当前视图之间的点匹配。
matches = repmat((1:size(PrevPoints, 1))', [1, 2]);
matches = matches(validIdx, :);
vSet = addConnection(vSet, i-1, i, 'Matches',matches);
% 因为储存的点为PrevPoints和currPoints,要变成 matchedPoints1,2的对应关系。
% 获取包含前一个相机姿势的表。
prevPose = poses(vSet, i-1);
prevOrientation = prevPose.Orientation{1};
prevLocation = prevPose.Location{1};
% 计算当前相机在全局坐标系中相对于第一个视图的姿态。
orientation = orient * prevOrientation;
location = prevLocation + loc * prevOrientation;
vSet = updateView(vSet, i, 'Orientation', orientation, 'Location', location);
tracks = findTracks(vSet); % 在所有视图中查找轨迹
camPoses = poses(vSet); % 得到所有视角的相机姿态表
% 确定三维世界点的初始位置。
xyzPoints = triangulateMultiview(tracks, camPoses, cameraParams);
% 改进三维世界点和相机的姿势.(光束平差法)
[xyzPoints, camPoses, reprojectionErrors] = bundleAdjustment(xyzPoints, ...
tracks, camPoses, cameraParams, 'FixedViewId', 1, ...
'PointsUndistorted', true);
% 保存精准的相机姿势
vSet = updateView(vSet, camPoses);
PrevPoints = currPoints;
end
4、添加颜色
原理很简单,就是找三维点在像素平面中对应位置的颜色信息,然后添加上去。
numPixels = size(I1, 1) * size(I1, 2); %读取图片尺寸
allColors = reshape(I1, [numPixels, 3]); % 改变数组的维数。
colorIdx = sub2ind([size(I1, 1), size(I1, 2)], round(matchedPoints(:,2)), ...
round(matchedPoints(:, 1)));
color = allColors(colorIdx, :);
% 创建点云
goodIdx = (reprojectionErrors < 15); % 删除误差大的点
xyzPoints = xyzPoints(goodIdx, :);
Color = color(goodIdx, :);
ptCloud = pointCloud(xyzPoints, 'Color', Color); % 将点云添加上颜色
5、显示点云图
% 显示相机姿态
% camPoses = poses(vSet);
% figure;
% plotCamera(camPoses, 'Size', 0.2);
% hold on
% 显示三维点.
pcshow(ptCloud, 'VerticalAxis', 'y', 'VerticalAxisDir', 'down', ...
'MarkerSize', 45);
grid on
hold off
% 查看指定卷,免得图像乱跑
loc1 = camPoses.Location{1};
xlim([loc1(1)-5, loc1(1)+4]);
ylim([loc1(2)-5, loc1(2)+4]);
zlim([loc1(3)-1, loc1(3)+20]);
camorbit(0, -30);
% 储存点云
a = cell(1,i);
a{1} = ptCloud;
save('PtCloud.mat','a');
6、重建结果
minEigen特征

surf特征
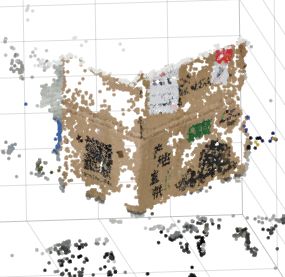
kaze特征

目前遇到问题有两个,一个是颜色匹配有点误差,还有一个是太占内存了,如果电脑内存不够可能会出现错误。
接下来研究一下如何重建一个完整的盒子,考虑再用一个循环,然后点云拼接,本人新手上路,有大神的话可以指点一下。
附带我的程序和图片:sfm三维重建