OpenCv漫水填充floodFill详解
1.函数原型:
void cvFloodFill (
IplImage * img, // 输入图像
CvPoint seedPoint, // 种子点
CvScalar newVal, // 像素点被染色的值
CvScalar loDiff = cvScalarAll(0), // 染色边界判定
CvScalar upDiff = cvScalarAll(0), // 染色边界判定
CvConnectedComp * comp = NULL, // 填充区域统计属性
int flags = 4, // 连通性,相关性等参数设置。
CvArr * mask = NULL // 掩码区域
);
-
image 【输入/输出】 1或者3通道、 8bit或者浮点图像。仅当参数flags的FLOODFILL_MASK_ONLY标志位被设置时image不会被修改,否则会被修改。
-
mask 【输入/输出】 操作掩码,必须为单通道、8bit,且比image宽2个像素、高2个像素。使用前必须先初始化。Flood-filling无法跨越mask中的非0像素。例如,一个边缘检测的结果可以作为mask来阻止边缘填充。在输出中,mask中与image中填充像素对应的像素点被设置为1,或者flags标志位中设置的值(详见flags标志位的解释)。此外,该函数还用1填充了mask的边缘来简化内部处理。因此,可以在多个调用中使用同一mask,以确保填充区域不会重叠。
-
seedPoint 起始像素点
-
newVal 重绘像素区域的新的填充值(颜色)
-
rect 可选输出参数,返回重绘区域的最小绑定矩形。
-
loDiff 当前选定像素与其连通区中相邻像素中的一个像素,或者与加入该连通区的一个seedPoint像素,二者之间的最大下行差异值。
-
upDiff 当前选定像素与其连通区中相邻像素中的一个像素,或者与加入该连通区的一个seedPoint像素,二者之间的最大上行差异值。
-
flags flags标志位是一个32bit的int类型数据,其由3部分组成: 0-7bit表示邻接性(4邻接、8邻接);8-15bit表示mask的填充颜色;16-31bit表示填充模式(详见填充模式解释)
flood fill填充模式:
//! floodfill algorithm flags
enum FloodFillFlags {
/** If set, the difference between the current pixel andseed pixel is considered. Otherwise,
the difference between neighbor pixels is considered (that is, the rangeis floating). */
FLOODFILL_FIXED_RANGE = 1 << 16,
/** If set, the function does not change the image ( newValis ignored), and only fills the
mask with the value specified in bits 8-16 of flags as described above.This option only make
sense in function variants that have the mask parameter. */
FLOODFILL_MASK_ONLY = 1 <<17
};
FLOODFILL_FIXED_RANGE:如果设置了该值,则考虑当前像素与seed像素之间的差异,否则考虑相邻像素之间的差异(即浮动区间)。
FLOODFILL_MASK_ONLY:如果设置了该值,floodFill函数不会修改image的内容(newVal被忽略),只使用flags标志中bit8-15的值填充mask。该选项仅在含mask参数的floodFill函数中有效。
2.函数作用:
用给定的颜色填充一个连通区域。
示例:
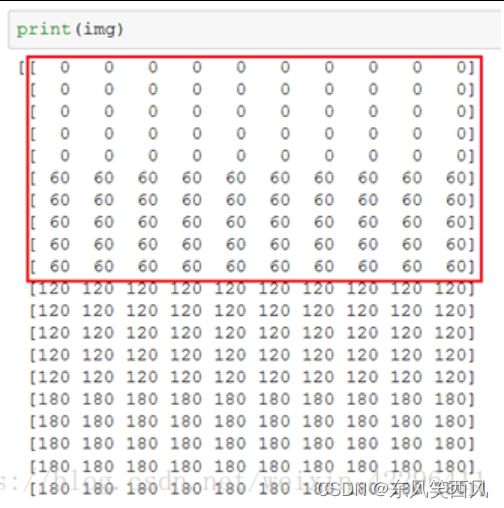
先创建一个 20*10 像素的灰度图像,为了便于观察,我们以 60 个灰度为一个等级填充图片:
import cv2
import numpy as np
img = np.zeros((20,10), dtype=np.uint8)
i = 0
for v in img:
v[:] = i//5 * 60
i += 1
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
得到的图片输出:

该图片被分为4个横条块,其灰度值自顶向下依次为:0、60、120、180。
接下来,我们选定 seed=(7,7) , 该点落在这里(下图第二个横条小白点处):

我们选定该点作为 seedPoint ,对 img 图片进行 floodFill :
#encoding=utf-8
import cv2
import numpy as np
img = np.zeros((20,10), dtype=np.uint8)
i = 0
for v in img:
v[:] = i//5 * 60
i += 1
cv2.imwrite('img_init.png', img)
seed = (7, 7)
#构建mask,根据mask参数的介绍,其size必须为宽img+2,高img+2
mask = np.zeros((img.shape[0]+2, img.shape[1] +2), dtype=np.uint8)
newVal = (127) #img fill的填充值
mask_fill = 252 #mask的填充值
#floodFill充值标志
flags = 4|(mask_fill<<8)|cv2.FLOODFILL_FIXED_RANGE
#连通区范围设定
loDiff, upDiff = 20,20
#执行floodFill操作
ret, image, mask, rect = cv2.floodFill(img, mask, seed, newVal,(loDiff), (upDiff), flags)
cv2.imwrite('img.png', img)
cv2.imwrite('img_mask.png', mask)
floodFill 前、后的 img 图像:

对比发现,img图像的第二行颜色变了,check一下第二行的颜色值,发现变为了127。
newVal = (127) #img fill的填充值

再check一下得到的mask图像:

其像素值为:

我们观察mask的像素组成会发现,执行floodFill后得到的mask值,其被填充部分的值来自于:
mask_fill =252 #mask的填充值
并且,最外围边缘一周的像素点,全部被填充为1,这与mask参数的描述完全一致。 接下来,我们调整一下loDiff的值为70,我们看看会有什么不一样:
loDiff, upDiff =70,20
得到的 img 图像为:

与原始img图片对比:

观察floodFill后的img像素值:

我们发现img图像第一、二行的值均被置为127了,这是因为当loDiff值为70时,seed=(7,7)所在点的值为60,而60-loDiff=-10,60+upDiff=80,而img图片第一、二行的像素值分别为0和60,均值[-10,80]这个区间内,故img图片第一、二行均被填充。
以上都是基于 FLOODFILL_FIXED_RANGE 这种填充方式的,下面我们对比一下使用 FLOODFILL_MASK_ONLY 方式来填充会有什么不一样。其他保存不变,我们只需将:
flags =4|(mask_fill<<8)|cv2.FLOODFILL_FIXED_RANGE
改为:
flags =4|(mask_fill<<8)|cv2.FLOODFILL_MASK_ONLY
3.FLOODFILL_MASK_ONLY方式填充
运行程序后,发现img图片第一、第二行的值均未发生变化:
但mask图片第一、第二行的值与前面使用FLOODFILL_FIXED_RANGE 时是不一样的:

故此,可以验证前面对FLOODFILL_MASK_ONLY的解释,只影响mask的输出,对image无影响。
4.flags的0-7bit邻接性
最后,对flags的0-7bit邻接性进行分析:
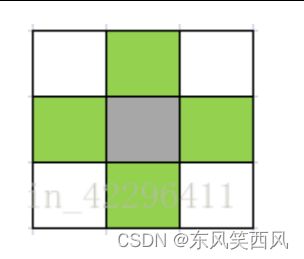
相邻像素
4领域
对位于坐标(x,y)的像素p有4个水平和垂直的相邻像素,它们的坐标是:
(x+1,y), (x-1,y),(x,y+1),(x,y-1)
这组像素称为p的4邻域,用 N4(p) 表示:
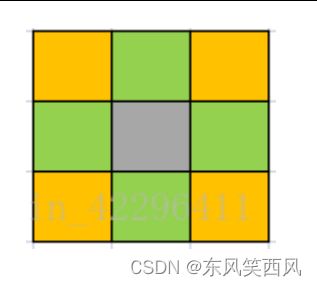
对角相邻像素
p的四个对角像素的坐标为:
(x+1,y+1), (x+1,y-1),(x-1,y+1),(x-1,y-1)
用 ND(p) 表示:

8邻域
N4(p) 和 ND(p) 组成像素p的8个相邻像素,称为p的8邻域,用 N8(p) 表示:
邻接性
4邻接-如果q在集合 N4(p) 中,则p和q是4邻接。
8邻接-如果q在集合 N8(p) 中,则p和q是8邻接。
最后,通过代码来演示一下:
#encoding=utf-8
#创建一个8x8的图片
import cv2
import numpy as np
size = 8
img = np.zeros((size,size), dtype=np.uint8)
img[:] = 0
img[4,4] = 1
img[3,4] = 1
img[4,3] = 1
img[4,5] = 1
img[5,4] = 1
img[2,4] = 1
img[1,5] = 1
img[1,3] = 1
img[2,2] = 1
img[3,1] = 1
img[4,0] = 1
img[5,1] = 1
img[6,2] = 1
img[7,3] = 1
print(img)
创建一个以p(4,4)为中心像素的8x8图像:

下面以 p(4,4) 作为seed,对该图像进行floodFill操作,对比4邻接和8邻接的差异:
#encoding=utf-8
#创建一个8x8的图片
import cv2
import numpy as np
size = 8
img = np.zeros((size,size), dtype=np.uint8)
img[:] = 0
seed_x = 4
seed_y = 4
img[seed_x, seed_y] = 1
img[4,4] = 1
img[3,4] = 1
img[4,3] = 1
img[4,5] = 1
img[5,4] = 1
img[2,4] = 1
img[1,5] = 1
img[1,3] = 1
img[2,2] = 1
img[3,1] = 1
img[4,0] = 1
img[5,1] = 1
img[6,2] = 1
img[7,3] = 1
seed = (seed_x, seed_y)
mask= np.zeros((size+2,size+2), dtype=np.uint8)
img1 = img.copy()
img2 = img.copy()
mask1 = mask.copy()
mask2 = mask.copy()
ret, img1,mask1, rect=cv2.floodFill(img1, mask1, seed,(8), (0),(0), flags=4|(3<<2)|cv2.FLOODFILL_FIXED_RANGE)
ret, img2,mask2, rect=cv2.floodFill(img2, mask2, seed,(8), (0),(0), flags=8|(3<<2)|cv2.FLOODFILL_FIXED_RANGE)
print(img)
print(img1)
print(img2)


https://blog.csdn.net/weixin_42296411/article/details/80966724?spm=1001.2101.3001.6650.2&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-2-80966724-blog-50526314.pc_relevant_paycolumn_v3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-2-80966724-blog-50526314.pc_relevant_paycolumn_v3&utm_relevant_index=5
http://www.mamicode.com/info-detail-189295.html