【现代机器人学】学习笔记五:逆运动学(Inverse kinematics)
这节的内容是根据末端位姿,计算关节角度,也就是所谓的IK。IK其实是一个比较复杂的问题,远不止本节内容所述的这么简单。这节个人觉得还是偏向基本的概念了。
逆运动学解析法
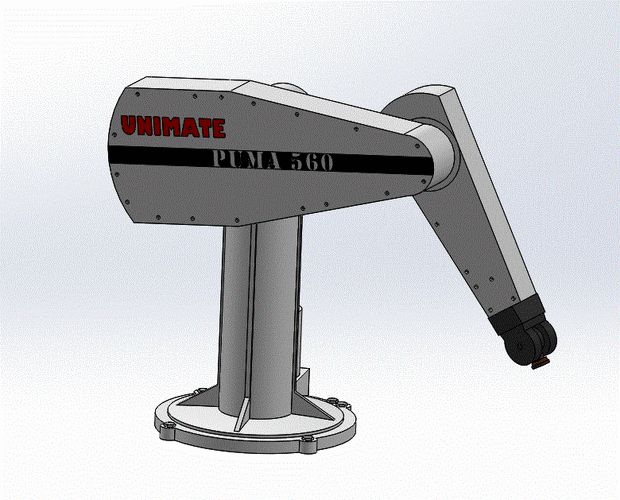
6R PUMA机器人

这节文章中大力描述了一些肩关节,肘关节,腕关节,这个需要事先联想一下人的胳膊的构造。拿右边胳膊来说,比如上图中,可以把z0想象成从你头顶射出向上方的轴线,然后你的胳膊就可以绕着身体左右摆动,即这里的θ1。还可以沿着身体右侧抬起来,即θ2。那么3轴就相当于你的肘部的关节,可以弯曲,控制小臂(图里是a3)。末端456轴图里面没有画出来,但实际上就是一个可以朝三个方向旋转的轴,交于一点,类似于你的手腕。
它的解析法求解,仔细想想也不困难:

py和px可以算θ1。(使用atan2(py,px)来算)
再根据图里的r和pz算最长的那个斜边。然后余弦定理,把α和β算出来,再求解θ2和θ3就是了。
注意,解不只有一种,比如把θ1先转180度,然后2,3关节从空中翻过来(想象一下),依然能达到同一个末端。
能计算出末端位置以后,再算姿态,因为后面三个关节轴互相垂直,所以螺旋轴的w分别为(0,0,1),(0,1,0),(1,0,0),套入FK公式,用PoE公式来看,左边一堆指数积,等于右边的FK结果。然后移项完就是左边三个旋转,等于右边一个已经得到的R。用ZYX欧拉角和R的转换公式即可。
书中还提到了另外一种复杂的情况,即含肩部偏距,就是1关节和2关节不是交于一点的,而是有个偏距。这种通常情况,如果不考虑机械臂的关节限位的话,是有4种解的。
这种的解析法实际上还是有些复杂,网页上也说不清楚(其实我认为也没有说的必要),根据一个老同事的意见,一个构型的机械臂的解析法逆解公式,找个推导的论文,直接用结论就好了。我深以为然...
Stanford机械臂
这种就是把肘关节替换成了平动副

解法这里借用滕瀚哲老师的ppt内容:
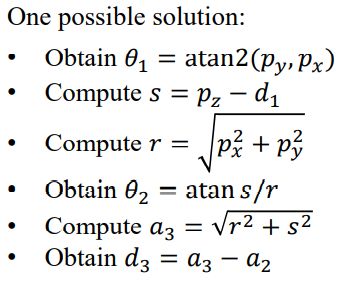
同样,这种解法也可以像PUMA机器人一样,1轴转180度到另一边去,然后2轴再从上方180度翻回来。。
顺便在这里提一下书中没有提到的机器人的pieper准则:
Pieper准则:如果机器人满足两个充分条件中的一个,就会得到封闭解,这两个条件是:
- 三个相邻关节轴相交于一点;
例如上面提到的PUMA和Stanford机器人,某端3轴交于一点。
- 三个相邻关节轴相互平行;
- 例如ur5机器人:

逆运动学的数值求解
这部分开始说的一点很重要,即计算有解析解,也可以用数值法来改善求解精度。例如PUMA机器人,关节如果不能绝对精确交于一点,那么也不用摒弃解析法,而是可以用它当作数值法的初值,来迭代结果。
牛顿拉弗森法
相比我们熟悉的梯度下降法,这个方法的好处似乎它不用指定迭代步长:
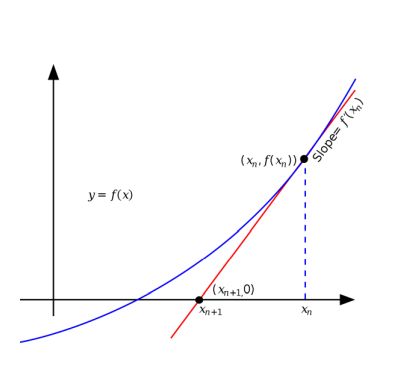
假如我们想求得蓝线和横轴的交点,只需要确定一个初值,例如xn。然后过曲线上对应点的斜率,让它交于横轴,xn减去这个这个三角形的底,就可以得到xn+1,一直下去就能逐步逼近蓝线和横轴的交点了。。

根据这个式子,f'x很简单是高比底,我们拿高,再比一个(高比底),就得到了底,用xn减去这个底,继续逼近就是了。
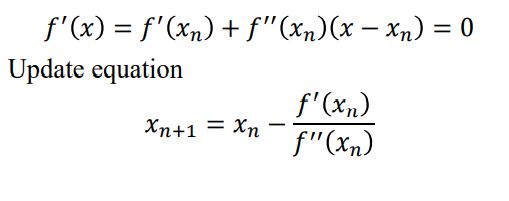
同样,如果是求最低点,也可以说让斜率为0,那么也是相同的道理(用泰勒展开):
逆运动学的数值算法
对于机器人这里,做法也是类似:
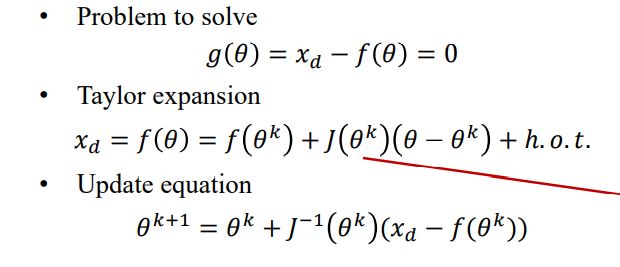
这时候我们可能不是想让f函数的结果等于0,而是想让它等于某个值,例如xd。因为在这里,f函数实际上是前向运动学FK的函数,它是关于关节角θ的函数,希望得到的当然是末端位姿x了。
这时候就要重新构造一个关于θ的函数gθ,让它等于0。
这时候原先的:
把θ套进去,就是:
![]()
而![]() ,继续带入就是:
,继续带入就是:
![]()
即:

注意:
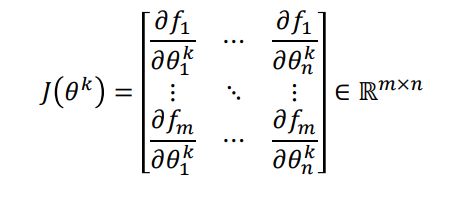
1.FK函数对θ求导,就是雅可比矩阵。
我们可以看到,不同列是不同的关节变量,同一列里面的不同行则是f结果中的各项对于同一个关节的偏导数。
2.这个公式可以这样辅助记忆:
每次修改的步长,是误差左乘雅可比矩阵的逆。

ps:不过这种方法和梯度下降法比看似很吊,因为不用人为指定梯度下降里面的步长了,但是也存在一个问题,就是当落在最高点或者最高点附近6的时候,这时候梯度是0,用牛顿拉弗森法算出来的步长是无限大,根本就没法收敛。
另外中文翻译版的书里,图6.7,最后一句话,当初始值在xd-f(θ)高点之上或附近,结果可能导致更大的... 这个地方翻译的就很烂。译者画蛇添足的加了一个“之上”,搞得好像是在那个高点上方。但是实际看了英文版原版就知道,这里人家用的介词是"at",而不是“up”,所以翻译成“落在高点”即可。
伪逆
我们回到知识点:
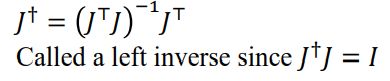
前面的方法,有一个前提是雅可比可逆。如果雅可比不可逆,它的逆矩阵就得不到,那后面就不好算了。
所以这时候可以采用伪逆的概念来代替求解逆矩阵。(前提是机器人不能处于奇异位形,长宽不一致的雅可比矩阵的满秩为小的那个数)
假设一个矩阵是m行n列,反正伪逆算出来的大小一定是n行m列。
如果关节n比末端变量m多,那么这个矩阵就是粗矮(当然也意味着这是一个冗余机器人),求解方法就是:

辅助记忆法:从下面的
入手,因为冗余,所以雅可比可以光明正大的写在前面,伪逆跟在后面。所以在
部分也是逆在后面。把握“伪逆算出来的大小一定是n行m列”,这样就很容易得知这个设置的结构了,只有这样安排才能满足这个要求。
同理,如果末端关节n比m少,则它是个欠驱动的机器人,那只能让人家伪逆在前面:
同样右侧也是逆的部分在前面,根据计算出的伪逆大小是n行m列,也可以很快写出这个公式来。
逆运动学求解示例(末端到达3d点)
做法很简单,一直迭代即可:
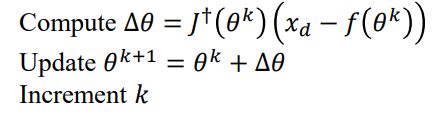
雅可比则是:
逆运动学求解示例(末端到达6d pose)

这个要注意几点:
1.误差是FK得到的末端位姿和期望位姿,这俩矩阵的差异不能直接减,而是必须用逆矩阵计算差异,这个在机器人其他领域也很常见了。
2.得到误差后,求log,让它变成一个旋量![]() ,那么这个旋量就是末端b到期望d的旋量(因为是计算Tbd,即相对于末端坐标系的预期位形)
,那么这个旋量就是末端b到期望d的旋量(因为是计算Tbd,即相对于末端坐标系的预期位形)
3.左乘物体坐标系的雅可比,加到上次的关节角上。
![]()
物体雅可比的概念参见【现代机器人学】学习笔记四:一阶运动学与静力学_zkk9527的博客-CSDN博客
这点中文版书中翻译仍然有误,可见这一节译者自己的水平确实不太行。
如中文书中140页底下,"
的伪逆应该作为物体速度旋量
..."
这显然是翻译错误,因为雅可比的绝对不可能是旋量,这里原书中是这样写的:
“the pseudoinverse of
"
这里的act on 应该翻译为 “作用于” 更合适,而不是翻译成“作为”。
逆向速度运动学
在上一节的内容中,表面上叫一阶运动学于静力学,但是实际上在一阶运动学的部分只有前向运动学的概念,而没有逆向的内容。这节课才进行了补充:
显然期望的结果是,根据末端速度,计算出关节速度。
上一节的内容提到,关节角速度,左乘雅可比矩阵,即可得到末端速度。
那么在这里,结合上面提到的雅可比矩阵的伪逆的概念,则是末端速度左乘雅可比矩阵的伪逆,即可得到关节角速度。

逆向速度运动学的内容其实就这些。
预热内容:
但是书里面还乱七八糟夹杂了一些其他内容,这些内容实际上后面动力学部分(此处占坑)是要整体细致的讲的,这里可能只是想先预热一下,先做了解:
即冗余机器人,IK反解可能无数个,因此需要做一些限制,比如赋予关节速度不同的权重。
这样,其实目标函数是,希望让动能和势能的变化最小 ,不过同时还要满足一个约束,即关节速度左乘雅可比为末端旋量。
这种求解目标函数,还附带一个约束的题目,一律可以用拉格朗日乘子法求解,有一套固定的求解方法,套公式即可。这个其实也是大学高等数学的内容。这个公式我就不再罗列了,需要就去查附录D,后续在动力学部分会深入介绍这个内容。
讲这个的目的是:
1.回顾静力学部分概念,关节力矩等于雅可比逆矩阵左乘力旋量。
2.拉格朗日乘子可以理解为一个动态力产生的末端速度,与平衡重量的静态力相加的结果。(为后面动力学预热)
3.告诉你,最小动能方程中,也用到了伪逆的概念(当势能函数为0或者不定的时候),强调了伪逆的重要性。
最后再强调两点:
1.对于冗余机器人来说,末端闭环(从一个点出发回到该点),不意味着关节角度闭环,可能起点和终点对应的关节角是不同的。
2. ![]() 当中,
当中, 表示1秒内把
表示1秒内把![]() 转换到Tsd的速度旋量。
转换到Tsd的速度旋量。
ps:J的伪逆里面的J是物体雅可比,这里的V就是Vb,就是对Tbd求对数,这个代表目前从Tsb到Tsd之间的误差。
另外不管是原英文书,还是翻译的中文书,在最后的本章小结中,都写错了,误把![]() 写成了
写成了![]() ,其实这个
,其实这个![]() 上面是没有dot的,加上了dot意味着它是角速度了。原书写错了,翻译的时候也没发现。。等我总结完以后,我会整理一下这本书已经发现的一些错误,把它汇总起来,反馈给读者邮箱。
上面是没有dot的,加上了dot意味着它是角速度了。原书写错了,翻译的时候也没发现。。等我总结完以后,我会整理一下这本书已经发现的一些错误,把它汇总起来,反馈给读者邮箱。