机器学习之概率图模型
文章目录
- 0. 背景介绍
- 1. 隐马尔科夫模型(Hidden Markov Model, HMM)
-
- 1.1. HMM的数学定义
- 1.2. HMM的实际应用问题描述
-
- 1.2.1. 观测序列概率计算问题
-
- 1.2.1.1. 直接暴力计算法
- 1.2.1.2. 基于动态规划的前向算法
- 1.2.1.3. 《统计学习方法》例10.2python代码
- 1.2.2. 状态序列预测问题算法
-
- 1.2.2.1. 直接暴力计算法
- 1.2.2.2. Viterbi算法
- 1.3. HMM实际例子
- 1.4. 马尔科夫随机场(Markov Random Field, MRF)
- 2. 条件随机场(Conditional Random Field, CRF)
-
- 2.1. CRF的数学定义
- 2.2. 特征函数的例子
参考资料:
- 《机器学习》——周志华
- 《统计学习方法》——李航
- https://blog.csdn.net/continueoo/article/details/77893587
- https://blog.csdn.net/continueoo/article/details/77893587
0. 背景介绍
判别式模型,对条件分布进行建模;生成式模型,对联合分布进行建模。概率图模型是一类利用图来表达变量间相关关系的概率模型,既包含判别式模型,也包含生成式模型。
1. 隐马尔科夫模型(Hidden Markov Model, HMM)
1.1. HMM的数学定义
HMM是关于时序的概率模型,描述由一个隐藏的马尔科夫链随机生成不可观测的状态随机序列,再由各个状态生成一个可观测的随机序列的过程。
它是一种生成式模型,因为它需要先生成状态变量,然后在状态的条件下生成观测变量,根据条件概率的公式,等价于生成状态变量和观测变量的联合概率。所以是生成式模型。
HMM模型常用于序列标注问题建模,假设时间长度为n,
对于 i = 1 , 2 , ⋯ , n i=1,2,\cdots,n i=1,2,⋯,n时刻,HMM中的变量可以分为两组,用 X = { x 1 , x 2 , ⋯ , x n } , x i ∈ O = { o 1 , o 2 , ⋯ , o M } X=\{x_1,x_2,\cdots,x_n\},x_i\in O=\{o_1,o_2,\cdots,o_M\} X={x1,x2,⋯,xn},xi∈O={o1,o2,⋯,oM}表示观测变量序列(每个观测变量有 M M M个可能的取值); Y = { y 1 , y 2 , ⋯ , y n } , y i ∈ S = { s 1 , s 2 , ⋯ , s N } Y=\{y_1,y_2,\cdots,y_n\},y_i\in S=\{s_1,s_2,\cdots,s_N\} Y={y1,y2,⋯,yn},yi∈S={s1,s2,⋯,sN}(每个状态变量有 N N N个可能的取值)表示状态变量序列,也叫隐变量。
并且有如下假设:在任一时刻,观测变量的取值仅仅依赖于该时刻的状态变量,即 x t x_t xt仅由 y t y_t yt决定;
P ( x t ∣ y T , x T , y T − 1 , x T − 1 , ⋯ , y 1 , x 1 ) = P ( x t ∣ y t ) ) (1-1) P(x_t|y_T,x_T,y_{T-1},x_{T-1},\cdots,y_1,x_1)=P(x_t|y_t))\\ \tag{1-1} P(xt∣yT,xT,yT−1,xT−1,⋯,y1,x1)=P(xt∣yt))(1-1)
同时, y t y_t yt仅依赖于 y t − 1 y_{t-1} yt−1,即状态变量序列是一个马尔科夫链。由此可以得到所有变量的联合概率分布为(注意根据假设,条件概率的条件省去了无关变量):
P ( x 1 , y 1 , ⋯ , x n , y n ) = P ( y 1 ) P ( x 1 ∣ y 1 ) ∏ i = 2 n P ( y i ∣ y i − 1 ) P ( x i ∣ y i ) (1-2) P(x_1,y_1,\cdots,x_n,y_n)=P(y_1)P(x_1|y_1)\prod_{i=2}^{n}P(y_i|y_{i-1})P(x_i|y_i)\\ \tag{1-2} P(x1,y1,⋯,xn,yn)=P(y1)P(x1∣y1)i=2∏nP(yi∣yi−1)P(xi∣yi)(1-2)
除了前面提到的状态空间 Y Y Y和观测空间 X X X,要想确定一个HMM模型还需要如下三组参数:
- 状态转移概率矩阵(隐藏状态到隐藏状态之间的概率转换): A = [ a i j ] N × N A=[a_{ij}]_{N\times N} A=[aij]N×N,其中 a i j = P ( y t + 1 = s j ∣ y t = s i ) , 1 ≤ i , j ≤ N a_{ij}=P(y_{t+1}=s_j|y_t=s_i),1\leq i,j\leq N aij=P(yt+1=sj∣yt=si),1≤i,j≤N.为了便于后文公式推导中的符号说明,我们引入 a s i s j = P ( y t + 1 = s j ∣ y t = s i ) , 1 ≤ i , j ≤ N a_{s_is_j}=P(y_{t+1}=s_j|y_t=s_i),1\leq i,j\leq N asisj=P(yt+1=sj∣yt=si),1≤i,j≤N。有时候也用省略的写法 a i j a_{ij} aij
- 观测概率矩阵(也叫发射概率,隐藏状态到观测状态之间的概率转换): B = [ b i j ] N × M B=[b_{ij}]_{N\times M} B=[bij]N×M,其中 b i j b_{ij} bij表示 P ( x t = o j ∣ y t = s i ) , 1 ≤ i ≤ N , 1 ≤ j ≤ M P(x_t=o_j|y_t=s_i),1\leq i\leq N,1\leq j\leq M P(xt=oj∣yt=si),1≤i≤N,1≤j≤M.为了便于后文公式推导中的符号说明,我们引入 b s i o j b_{s_io_j} bsioj表示 P ( x t = o j ∣ y t = s i ) , 1 ≤ i ≤ N , 1 ≤ j ≤ M P(x_t=o_j|y_t=s_i),1\leq i\leq N,1\leq j\leq M P(xt=oj∣yt=si),1≤i≤N,1≤j≤M。有时候也用省略的写法 b i j b_{ij} bij
- 初始状态概率向量: π = ( π 1 , π 2 , ⋯ , π N ) \pi=(\pi_1,\pi_2,\cdots,\pi_N) π=(π1,π2,⋯,πN),其中 π i = P ( y 1 = s i ) \pi_i=P(y_1=s_i) πi=P(y1=si)
记一个HMM为 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π],则可按照如下过程产生观测序列:
- 设置t=1,根据初始状态概率 π \pi π选择初始状态 y 1 y_1 y1(比如根据概率最大的原则选取);
- 根据状态 y t y_t yt和输出观测概率矩阵 B B B确定观测变量 x t x_t xt;
- 根据状态 y t y_t yt和状态转移矩阵 A A A确定 y t + 1 y_{t+1} yt+1;
- 若 t < n t< n t<n,设置 t = t + 1 t=t+1 t=t+1,并跳转到2;否则停止。
1.2. HMM的实际应用问题描述
在实际应用中,我们常常关注HMM的下面三个问题:
- 观测序列概率计算问题:给定模型 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π]和观测序列 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},如何有效计算出观测序列出现的概率 P ( X ∣ λ ) P(X|\lambda) P(X∣λ)。换言之,如何评估模型与观测序列之间的匹配程度(因为计算出观测序列的时候,可能会有多个选择要选择最匹配的那个结构)。例如,根据时间序列的历史值预测未来值(已知n时刻及之前的x,对n+1时刻可能的x都拿来计算观测序列的概率,挑使得观测序列概率最大的状态作为n+1时刻的x);这个过程称为前向算法
- 状态序列预测问题算法:给定模型 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π]和观测序列 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},如何找到与此序观测序列最匹配的状态序列 Y = { y 1 , y 2 , ⋯ , y n } , y i ∈ { s 1 , s 2 , ⋯ , s N } Y=\{y_1,y_2,\cdots,y_n\},y_i\in\{s_1,s_2,\cdots,s_N\} Y={y1,y2,⋯,yn},yi∈{s1,s2,⋯,sN}。换言之,如何根据观测序列推断出隐藏状态。例如,在语音识别ASR中,如何根据语音信号(观测值)确定文字序列(隐藏状态);主流的算法是维特比算法
- 参数学习问题:给定观测序列 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},如何调整模型参数 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π]使得该序列出现的概率 P ( X ∣ λ ) P(X|\lambda) P(X∣λ)最大。换言之,如何训练模型使其能最好滴描述观测数据。例如,根据梯度下降的方式在序列样本上学习得到最优的模型参数;EM算法 前后向算法
1.2.1. 观测序列概率计算问题
给定模型 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π]和观测序列 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},如何有效计算出观测序列出现的概率 P ( X ∣ λ ) P(X|\lambda) P(X∣λ)。
1.2.1.1. 直接暴力计算法
此方法是最简单粗暴的算法,但是复杂度过高,实际中一般不采用。其他算法一般都是在此算法上优化得到的,因此有必要了解一下直接计算法的原理。
直接计算法的思路是,通过列举所有可能的长度为T的状态序列 Y = { y 1 , y 2 , ⋯ , y T } Y=\{y_1,y_2,\cdots,y_T\} Y={y1,y2,⋯,yT},求各个状态序列Y与观测序列 X = { x 1 , x 2 , ⋯ , x T } X=\{x_1,x_2,\cdots,x_T\} X={x1,x2,⋯,xT}的联合概率 P ( X , Y ∣ λ ) P(X,Y|\lambda) P(X,Y∣λ),然后利用全概率对所有可能的状态序列求和得到 P ( X ∣ λ ) P(X|\lambda) P(X∣λ)。
对于某个具体的状态序列 Y = { y 1 , y 2 , ⋯ , y T } Y=\{y_1,y_2,\cdots,y_T\} Y={y1,y2,⋯,yT},其概率为:
P ( Y ∣ λ ) = π y 1 a y 1 y 2 a y 2 y 3 ⋯ a y T − 1 y T (1-3) P(Y|\lambda)=\pi_{y_1}a_{y_1y_2}a_{y_2y_3}\cdots a_{y_{T-1}y_T}\tag{1-3} P(Y∣λ)=πy1ay1y2ay2y3⋯ayT−1yT(1-3)
给定上述状态序列,观测序列 X = { x 1 , x 2 , ⋯ , x T } X=\{x_1,x_2,\cdots,x_T\} X={x1,x2,⋯,xT}的概率为:
P ( X ∣ Y , λ ) = b y 1 , x 1 b y 2 , x 2 ⋯ b y T x T (1-4) P(X|Y,\lambda)=b_{y_1,x_1}b_{y_2,x_2}\cdots b_{y_Tx_T}\tag{1-4} P(X∣Y,λ)=by1,x1by2,x2⋯byTxT(1-4)
则状态序列和观测序列的联合概率可以表示为:
P ( X , Y ∣ λ ) = P ( X ∣ Y , λ ) P ( Y ∣ λ ) = π y 1 b y 1 x 1 a y 1 y 2 b y 2 x 2 a y 2 y 3 ⋯ b y T − 1 x T − 1 a y T − 1 y T b y T x T (1-5) \begin{aligned} P(X,Y|\lambda)&=P(X|Y,\lambda)P(Y|\lambda)\\ &=\pi_{y_1}b_{y_1x_1}a_{y_1y_2}b_{y_2x_2}a_{y_2y_3}\cdots b_{y_{T-1}x_{T-1}}a_{y_{T-1}y_T}b_{y_Tx_T}\tag{1-5} \end{aligned} P(X,Y∣λ)=P(X∣Y,λ)P(Y∣λ)=πy1by1x1ay1y2by2x2ay2y3⋯byT−1xT−1ayT−1yTbyTxT(1-5)
则观测序列的概率可以有全概率公式求得:
P ( X ∣ λ ) = ∑ Y P ( X ∣ Y , λ ) P ( Y ∣ λ ) = ∑ y 1 ∈ S , y 2 ∈ S , ⋯ , y T ∈ S π y 1 b y 1 x 1 a y 1 y 2 b y 2 x 2 a y 2 y 3 ⋯ b y T − 1 x T − 1 a y T − 1 y T b y T x T (1-6) \begin{aligned} P(X|\lambda)&=\sum_YP(X|Y,\lambda)P(Y|\lambda)\\ &=\sum_{y_1\in S,y_2\in S,\cdots,y_T\in S}\pi_{y_1}b_{y_1x_1}a_{y_1y_2}b_{y_2x_2}a_{y_2y_3}\cdots b_{y_{T-1}x_{T-1}}a_{y_{T-1}y_T}b_{y_Tx_T}\tag{1-6} \end{aligned} P(X∣λ)=Y∑P(X∣Y,λ)P(Y∣λ)=y1∈S,y2∈S,⋯,yT∈S∑πy1by1x1ay1y2by2x2ay2y3⋯byT−1xT−1ayT−1yTbyTxT(1-6)
上式的计算复杂度高达 O ( T N T ) O(TN^T) O(TNT)
1.2.1.2. 基于动态规划的前向算法
直接计算法复杂度过高的原因在于存在大量冗余计算。例如,当t时刻之前的状态序列固定时,穷举t时刻之后的状态序列的各种取值情况时,都会重复计算t时刻之前的各种取值情况。因此可以采用动态规划的思想,求得计算过程中的递推式,减少重复计算。
定义到t时刻时,观测序列 { x 1 , x 2 , ⋯ , x t } \{x_1,x_2,\cdots,x_t\} {x1,x2,⋯,xt}且状态为 s i s_i si的概率为前向概率,记作:
α t ( s i ) = P ( x 1 , x 2 , ⋯ , x t , y t = s i ∣ λ ) (1-7) \alpha_t(s_i)=P(x_1,x_2,\cdots,x_t,y_t=s_i|\lambda)\tag{1-7} αt(si)=P(x1,x2,⋯,xt,yt=si∣λ)(1-7)
进行如下递推计算过程:
初值t=1:
α 1 ( s i ) = π s i b s i x i , i = 1 , 2 , ⋯ , N (1-8) \alpha_1(s_i)=\pi_{s_i}b_{s_ix_i},i=1,2,\cdots,N\tag{1-8} α1(si)=πsibsixi,i=1,2,⋯,N(1-8)
对于 t = 1 , 2 , ⋯ , T − 1 t=1,2,\cdots,T-1 t=1,2,⋯,T−1:
α t + 1 ( s i ) = [ ∑ j = 1 N α t ( s j ) a s j s i ] b s i x t + 1 , i = 1 , 2 , ⋯ , N (1-9) \alpha_{t+1}(s_i)=\left[\sum_{j=1}^N\alpha_t(s_j)a_{s_js_i}\right]b_{s_ix_{t+1}},i=1,2,\cdots,N\tag{1-9} αt+1(si)=[j=1∑Nαt(sj)asjsi]bsixt+1,i=1,2,⋯,N(1-9)
终止值:
P ( O ∣ λ ) = ∑ i = 1 N α T ( s i ) (1-10) P(O|\lambda)=\sum_{i=1}^N\alpha_T(s_i)\tag{1-10} P(O∣λ)=i=1∑NαT(si)(1-10)
1.2.1.3. 《统计学习方法》例10.2python代码
项目地址:https://github.com/lankuohsing/machine-learning-in-python/tree/main/Probabilistic-Graphical-Model
# 状态 1 2 3之间的转移概率矩阵
A = [[0.5,0.2,0.3],
[0.3,0.5,0.2],
[0.2,0.3,0.5]]
# 初始状态概率
pi = [0.2,0.4,0.4]
# 每个袋子里,红白求的概率
# red white
B = [[0.5,0.5],
[0.4,0.6],
[0.7,0.3]]
# In[]
#前向算法
def hmm_forward(A,B,pi,O):
T = len(O)# 观测序列长度
N = len(A[0])# 状态个数
#step1 初始化
alpha = [[0]*T for _ in range(N)]# 每行代表不同的状态,每列代表不同的观测时刻
for i in range(N):
alpha[i][0] = pi[i]*B[i][O[0]]
#step2 计算alpha(t)
for t in range(1,T):
for i in range(N):
temp = 0
for j in range(N):
temp += alpha[j][t-1]*A[j][i]
alpha[i][t] = temp*B[i][O[t]]
#step3
proba = 0
for i in range(N):
proba += alpha[i][-1]
return proba,alpha
A = [[0.5,0.2,0.3],
[0.3,0.5,0.2],
[0.2,0.3,0.5]]
B = [[0.5,0.5],
[0.4,0.6],
[0.7,0.3]]
pi = [0.2,0.4,0.4]
O = [0,1,0]
proba,alpha=hmm_forward(A,B,pi,O) #结果为 0.130218
print(proba)
1.2.2. 状态序列预测问题算法
给定模型 λ = [ A , B , π ] \lambda=[A,B,\pi] λ=[A,B,π]和观测序列 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},如何找到与此序观测序列最匹配的状态序列 Y = { y 1 , y 2 , ⋯ , y n } , y i ∈ { s 1 , s 2 , ⋯ , s N } Y=\{y_1,y_2,\cdots,y_n\},y_i\in\{s_1,s_2,\cdots,s_N\} Y={y1,y2,⋯,yn},yi∈{s1,s2,⋯,sN}。
1.2.2.1. 直接暴力计算法
穷举所有的状态序列的可能情况,分别计算它们的概率并求最大。此方法时间复杂度过高,基本没有实用价值
1.2.2.2. Viterbi算法
(注:下文的起点,都是默认指0时刻从起点出发的意思)
该算法是基于动态规划的最短路径算法,在其他最短路径问题中也具有广泛应用。它的思想是:记末尾时刻为 T T T,如果最优路径在时刻t通过结点 i t ∗ i_t^* it∗,那么这条路径从结点 i t ∗ i_t^* it∗到终点 i T ∗ i_T^* iT∗的部分路径,对于从 i t ∗ i_t^* it∗到 i T ∗ i_T^* iT∗的所有子路径来说必须是最优的,同理,这条路径中从起点到结点 i t ∗ i_t^* it∗的部分路径也是从起点到结点 i t ∗ i_t^* it∗的所有子路径中最优的。根据这一原理,我们只需从时刻 t = 1 t=1 t=1开始,递推地计算从起点到在时刻t状态为i的结点的各条子路径中的最优路径,并记录下每个结点的上一时刻的最优结点,当计算到终点时就完成了整个最优路径的计算。
定义从起点到时刻t状态为i的所有子路径 ( i 1 , i 2 , ⋯ , i t ) (i_1,i_2,\cdots,i_t) (i1,i2,⋯,it)中概率最大值为:
δ t ( i ) = max i 1 , i 2 , ⋯ , i t − 1 P ( i t = i , i t − 1 , ⋯ , i 1 , x t , ⋯ , x 1 ∣ λ ) , i = 1 , 2 , ⋯ , N (1-11) \delta_t(i)=\mathop {\max }\limits_{i_1,i_2,\cdots,i_{t-1}}P(i_t=i,i_{t-1},\cdots,i_1,x_t,\cdots,x_1|\lambda),i=1,2,\cdots,N\tag{1-11} δt(i)=i1,i2,⋯,it−1maxP(it=i,it−1,⋯,i1,xt,⋯,x1∣λ),i=1,2,⋯,N(1-11)
那么可以得到 δ t + 1 ( i ) \delta_{t+1}(i) δt+1(i)的递推式:
δ t + 1 ( i ) = max i 1 , i 2 , ⋯ , i t P ( i t = i , i t , ⋯ , i 1 , x t + 1 , ⋯ , x 1 ∣ λ ) = max 1 ≤ j ≤ M [ δ t ( j ) a j i ] b i x t + 1 , i = 1 , 2 , ⋯ , N ; t = 1 , 2 , ⋯ , T − 1 (1-12) \begin{aligned} \delta_{t+1}(i)&=\mathop {\max }\limits_{i_1,i_2,\cdots,i_{t}}P(i_t=i,i_{t},\cdots,i_1,x_{t+1},\cdots,x_1|\lambda)\\ &=\mathop {\max }\limits_{1\leq j\leq M}[\delta_t(j)a_{ji}]b_{ix_{t+1}},i=1,2,\cdots,N;t=1,2,\cdots,T-1\\ \tag{1-12} \end{aligned} δt+1(i)=i1,i2,⋯,itmaxP(it=i,it,⋯,i1,xt+1,⋯,x1∣λ)=1≤j≤Mmax[δt(j)aji]bixt+1,i=1,2,⋯,N;t=1,2,⋯,T−1(1-12)
定义从起点到在时刻t状态为i的结点所有单个路径 { ( i 1 , i 2 , ⋯ , i t − 1 , t ) } \{(i_1,i_2,\cdots,i_{t-1},t)\} {(i1,i2,⋯,it−1,t)}中概率最大的路径的第 t − 1 t-1 t−1时刻的结点为:
ψ t ( i ) = a r g max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] (1-13) \psi_t(i)=arg \mathop{\max }\limits_{1\leq j\leq N}[\delta_{t-1}(j)a_{ji}]\tag{1-13} ψt(i)=arg1≤j≤Nmax[δt−1(j)aji](1-13)
那么viterbi算法的流程就呼之欲出了:
(1) 赋予初值:
δ 1 ( i ) = π i b i x 1 , i = 1 , 2 , ⋯ , N ψ i ( i ) = 0 , i = 1 , 2 , ⋯ , N (1-14) \begin{aligned} \delta_1(i)&=\pi_ib_{ix_1},i=1,2,\cdots,N\\ \psi_i(i)&=0,i=1,2,\cdots,N\\ \tag{1-14} \end{aligned} δ1(i)ψi(i)=πibix1,i=1,2,⋯,N=0,i=1,2,⋯,N(1-14)
(2) 递推式, t = 2 , 3 , ⋯ , T t=2,3,\cdots,T t=2,3,⋯,T:
δ t ( i ) = max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] b i x t + 1 , i = 1 , 2 , ⋯ , N ψ t ( i ) = a r g max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] , i = 1 , 2 , ⋯ , N (1-15) \begin{aligned} \delta_t(i)&=\mathop {\max }\limits_{1\leq j\leq N}[\delta_{t-1}(j)a_{ji}]b_{ix_{t+1}},i=1,2,\cdots,N\\ \psi_t(i)&=arg \mathop{\max }\limits_{1\leq j\leq N}[\delta_{t-1}(j)a_{ji}],i=1,2,\cdots,N\\ \tag{1-15} \end{aligned} δt(i)ψt(i)=1≤j≤Nmax[δt−1(j)aji]bixt+1,i=1,2,⋯,N=arg1≤j≤Nmax[δt−1(j)aji],i=1,2,⋯,N(1-15)
(3) 终止,计算完整的最优路径和概率:
P ∗ = max 1 ≤ i ≤ N δ T ( i ) i T ∗ = a r g max 1 ≤ j ≤ N [ δ t ( i ) ] i t ∗ = ψ t + 1 ( i t + 1 ∗ ) , t = T − 1 , T − 2 , ⋯ , 1 (1-16) \begin{aligned} P^*&=\mathop {\max }\limits_{1\leq i\leq N}\delta_T(i)\\ i_T^*&=arg \mathop{\max }\limits_{1\leq j\leq N}[\delta_{t}(i)]\\ i_t^*&=\psi_{t+1}(i_{t+1}^*),t=T-1,T-2,\cdots,1\\ \tag{1-16} \end{aligned} P∗iT∗it∗=1≤i≤NmaxδT(i)=arg1≤j≤Nmax[δt(i)]=ψt+1(it+1∗),t=T−1,T−2,⋯,1(1-16)
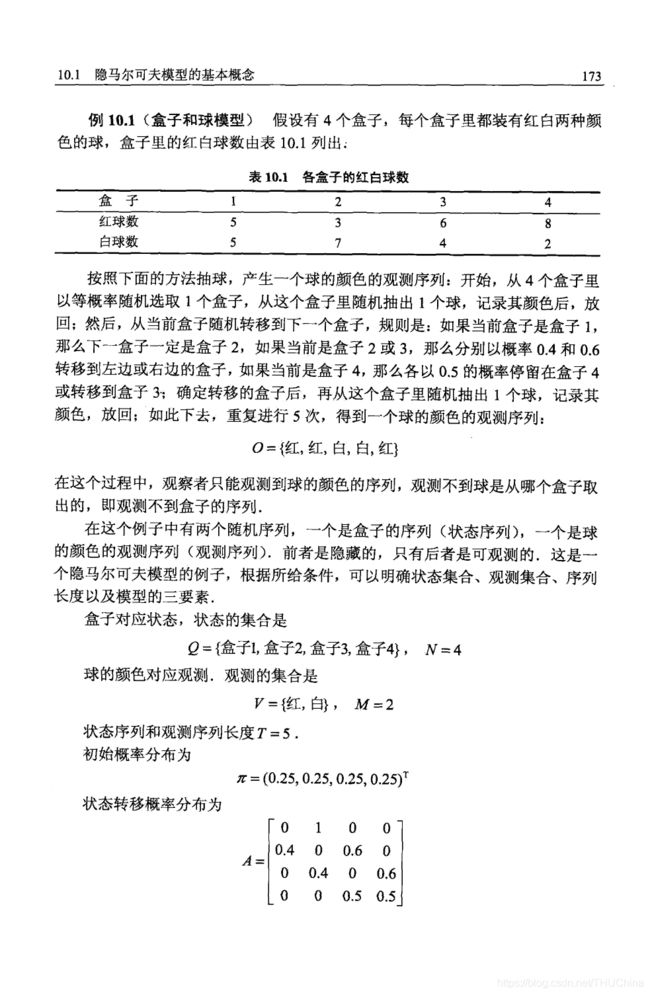
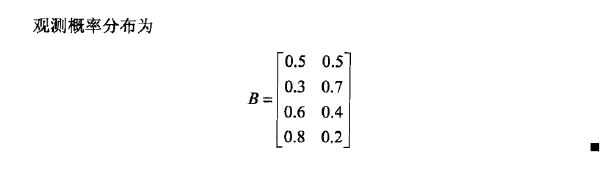
1.3. HMM实际例子
1.4. 马尔科夫随机场(Markov Random Field, MRF)
MRF是典型的马尔科夫网,是一种著名的无向图模型,图中每个结点表示一个或一组变量,结点之间的边表示两个变量之间的依赖关系。定义势函数(亦称“因子”)为变量子集上的非负实函数,主要用于定义概率分布函数。
对于结点的一个子集,若其中任意两点结点之间都有边连接,则称该节点子集为一个“团”。若在一个团中加入任何一个节点都不再形成团,则称该团为“极大团”。对于n各变量 X = { x 1 , x 2 , ⋯ , x n } X=\{x_1,x_2,\cdots,x_n\} X={x1,x2,⋯,xn},记其所有团构成的集合为 C C C,与团 Q ∈ C Q\in C Q∈C对应的变量集合记为 X Q X_Q XQ,则联合概率 P ( X ) P(X) P(X)定义为
P ( X ) = 1 Z ∏ Q ∈ C ψ ( X Q ) (1-2) P(X)=\frac{1}{Z}\prod_{Q\in C}\psi(X_Q)\tag{1-2} P(X)=Z1Q∈C∏ψ(XQ)(1-2)
其中 ψ ( X Q ) \psi(X_Q) ψ(XQ)为与团 Q Q Q对应的是函数, Z = ∑ X ∏ Q ∈ C ψ ( X Q ) Z=\sum_X\prod_{Q\in C}\psi(X_Q) Z=∑X∏Q∈Cψ(XQ) 为规范化因子,用以确保上式的值域为0~1.
为了减少需要计算的团的数目,有如下推论:若 Q Q Q不是极大团,则它必被一个极大团 Q ∗ Q^* Q∗,于是 P ( X ) P(X) P(X)可以基于极大团来定义。假设所有极大团构成的集合为 C ∗ C^* C∗,则有
P ( X ) = 1 Z ∗ ∏ Q ∈ C ∗ ψ ( X Q ) (1-3) P(X)=\frac{1}{Z^*}\prod_{Q\in C^*}\psi(X_Q)\tag{1-3} P(X)=Z∗1Q∈C∗∏ψ(XQ)(1-3)
假设结点集合A中的结点到结点集B中的点都必须经过结点集C中的结点,则称结点集A和B被结点集C分离,C称为“分离集”。对于马尔科夫随机场,有“全局马尔科夫性”:给定两个变量子集的分离集,则这两个变量子集条件独立,也即有
P ( x A , x B ∣ x C ) = P ( x A ∣ x C ) P ( x B ∣ x C ) (1-4) P(x_A,x_B|x_C)=P(x_A|x_C)P(x_B|x_C)\tag{1-4} P(xA,xB∣xC)=P(xA∣xC)P(xB∣xC)(1-4)
具体证明见《机器学习》(周志华)324.
由全局马尔科夫性可以得到两个推论:
- 局部马尔科夫性:给定某变量的邻接变量,则该变量条件独立与其他变量
- 成对马尔科夫性:给定所有其他变量,两个非邻接变量条件独立。
2. 条件随机场(Conditional Random Field, CRF)
2.1. CRF的数学定义
令 X = { x 1 , x 2 , ⋯ , x n } , x i ∈ { o 1 , o 2 , ⋯ , o M } X=\{x_1,x_2,\cdots,x_n\},x_i\in \{o_1,o_2,\cdots,o_M\} X={x1,x2,⋯,xn},xi∈{o1,o2,⋯,oM}为观测序列, Y = { y 1 , y 2 , ⋯ , y n } , y i ∈ { s 1 , s 2 , ⋯ , s N } Y=\{y_1,y_2,\cdots,y_n\},y_i\in\{s_1,s_2,\cdots,s_N\} Y={y1,y2,⋯,yn},yi∈{s1,s2,⋯,sN}为状态序列(标记或者叫标签),CRF的目的是构建条件概率模型 P ( Y ∣ X ) P(Y|X) P(Y∣X)。注意, Y Y Y的各分量之间可以是相关的,例如nlp的词性标注任务中,观测数据为句子的单词序列,标记数据为相应的词性序列。
令 G = ⟨ V , E ⟩ G=\langle V,E\rangle G=⟨V,E⟩表示结点与标记变量 Y Y Y中元素一一对应的无向图, y v y_v yv表示与结点 v v v对应的标记变量, n ( v ) n(v) n(v)表示结点 v v v的邻接节点,若图 G G G中每个变量 y v y_v yv都满足马尔科夫性,即
P ( y v ∣ X , Y V \ { v } ) = P ( y v ∣ X , Y n ( v ) ) (2-1) P\left(y_v|X,Y_{V\backslash\{v\}}\right)=P(y_v|X,Y_n(v))\tag{2-1} P(yv∣X,YV\{v})=P(yv∣X,Yn(v))(2-1)
则 ( Y , X ) (Y,X) (Y,X)构成一个条件随机场。
以链式条件随机场为例,CRF的条件概率被定义为
P ( Y ∣ X ) = 1 Z e x p ( ∑ j ∑ i = 1 n − 1 λ j t j ( y i + 1 , y i , X , i ) + ∑ k ∑ i = 1 n μ k s k ( y i , X , i ) ) (2-2) P(Y|X)=\frac{1}{Z}exp\left(\sum_j\sum_{i=1}^{n-1}\lambda_j t_j(y_{i+1},y_i,X,i)+\sum_k\sum_{i=1}^{n}\mu_k s_k(y_i,X,i)\right)\tag{2-2} P(Y∣X)=Z1exp(j∑i=1∑n−1λjtj(yi+1,yi,X,i)+k∑i=1∑nμksk(yi,X,i))(2-2)
其中 t j ( y i + 1 , y i , X , i ) t_j(y_{i+1},y_i,X,i) tj(yi+1,yi,X,i)是定义在观测序列的两个相邻标记位置上的转移特征函数,用于刻画向量标记变量之间的相关关系以及观测序列对它们的影响; s k ( y i , X , i ) s_k(y_i,X,i) sk(yi,X,i)是定义在观测序列的标记位置 i i i上的状态特征函数,用于刻画观测序列对标记变量的影响; λ j \lambda_j λj和 μ k \mu_k μk为参数, Z Z Z为规范化因子。
2.2. 特征函数的例子
以词性标注为例,
t j ( y i + 1 , y i , X , i ) = 1 , i f y i + 1 = [ P ] , y i = [ V ] a n d x i = " k n o c k " ; 0 o t h e r w i s e t_j(y_{i+1},y_i,X,i)=1,if\ y_{i+1}=[P],y_i=[V]\ and\ x_i="knock";0\ otherwise tj(yi+1,yi,X,i)=1,if yi+1=[P],yi=[V] and xi="knock";0 otherwise
s k ( y i , X , i ) = 1 , i f y i = [ V ] a n d x i = " k n o c k " ; 0 o t h e r w i s e s_k(y_i,X,i)=1,if\ y_i=[V]\ and\ x_i="knock";0\ otherwise sk(yi,X,i)=1,if yi=[V] and xi="knock";0 otherwise