ecognition软件_eCognition多尺度分割最优分割尺度的选择(1)
【均值方差法】
1.基本原理:
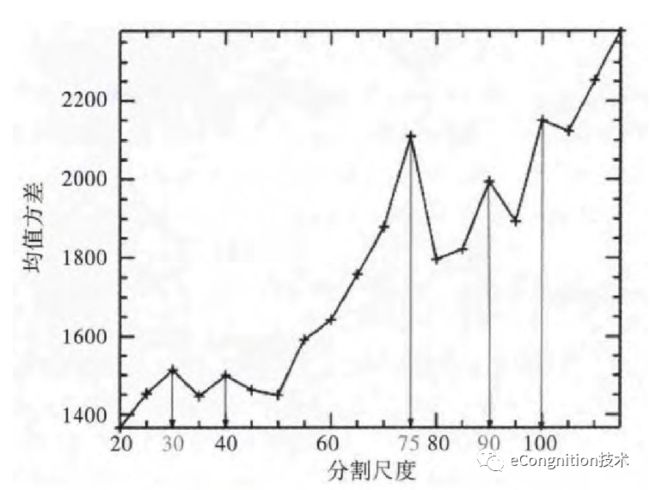
均值是指某个对象内所有像元灰度值的均值,均值方差是指整幅影像中所有对象像元灰度值均值的方差。影像层中纯对象增多,与相邻对象之间的光谱变异增大,则对象的均值方差增大;相反,混合对象增多时,与相邻对象之间的光谱变异降低,对象的均值方差就变小,当均值方差达到最大时所对应的分割尺度为最优。
2.公式:

其中CLi为第L波段中对象内第i个像元的亮度值,n为对象中像元的个数,CL为单个影像对象在第L波段的亮度均值。CL上加横表示影像中所有对象在第L波段的亮度均值,m为影像中对象个数的总和,S2表示方差。
3.在eCognition中的实现方法:
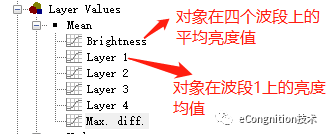
可以在eCognition导出特征值,Layer1导出的就直接时对象在1波段上的像元灰度值CL,然后在ArcGIS中计算其他指标进行统计。
4.该方法的缺点:
对分割结果质量的评价只考虑了单波段的信息,而没有充分利用遥感影像多波段的特点,分割结果的评价没有与分割过程建立联系, 并且在均值方差曲线上的最优尺度是一个值, 而不是一个范围。
ESP插件其实就是该方法的演化
【EPS工作原理】
1.计算一个波段内不同对象的局部方差(local variance (LV) graphs)→计算多个波段局部方差的均值
![]() ,
,
2.如果分割尺度比场景中的物体要大得多,分割得到的大部分对象之间高度相关,局部方差的测量值将会很低,如果分割尺度近似目标对象的大小,则对象间的差异性将增大,局部方差增大。统计不同分割尺度上的局部方差,随着分割尺度的增加,局部方差就会增大,直到其与真实的地物相匹配,局部方差就达到最大值,同一对象内部同质化最大,各对象间差异最大,局部方差最大的尺度被定义为最优分割尺度。

3.为了评估从一个对象级别到另一个对象级别的LV的动态,ESP使用一种称为变化率的度量

L代表目标层的局部方差;L-1代表将L目标层当作基准的下一层的局部方差
当ROC曲线达到极大值时,该尺度为最优分割尺度
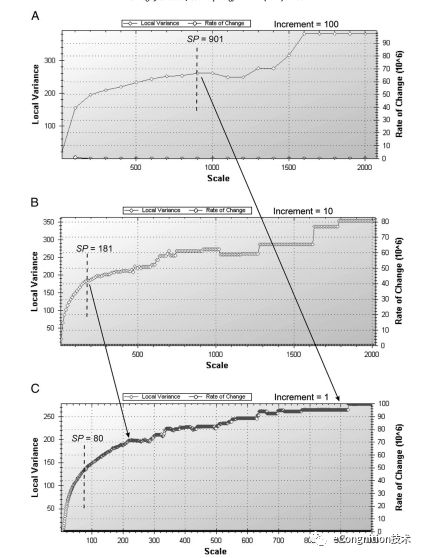
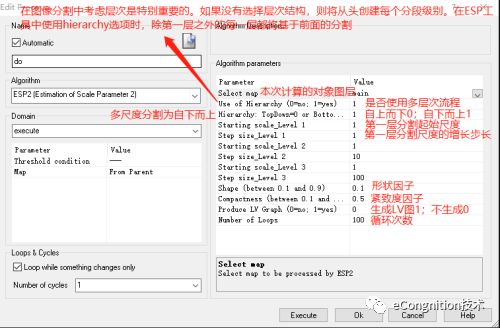
4.同时ESP使用三个层次的不同增量值对SP进行优化,以取代通过自动程序对LV图进行人工解释而选择的多尺度层次,默认的起始分割尺度为1,三层的尺度增量分别为1,10,100.如下图c所示,SP(分割尺度)=81时的LV值小于或等于SP=80时的LV值,所以尺度80为第一个最优分割尺度。同样的分析,以10(图B)和100(图A)的增量进行,可以平滑细节,使图C中两个突出的峰值分别用SP值为181(图B)和901(图A)时的近似基台值所代替。其中起始分割尺度、尺度增量、形状和精致度因子是指让ESP插件遍历分割的策略,可以进行不断的尝试。
【安装步骤】
1.解压之后包含以下文件

2.ZedGraph为dll应用程序拓展文件,把它放在易康安装目录下的D:\Program Files (x86)\eCognition Developer 64 8.9\bin\plugins
3.打开ecognition软件,建立工作区,导入影像,在Process菜单的Load Rule Set导入ESP_estimation_scale_parameter.dcp, 点击OK后完成。
4.在在Process菜单下打开Process Tree,在Process Tree窗体空白处右键Append New。
5.在Algorithm算法一栏中选择ESP插件。
6.ESP2是2014年最新版,ESP是2010版。
【参数解析】
生成的LV图将自动保存到影像所在的路径,文件名为“XX.Hierarchy_BU.txt”的文件;将其放入安装包里边的ESP_Estimation_Scale_Parameter_Chart.exe程序

有的同学设置ESP2算法后,虽然跑出了txt文件,但在Chart工具中计算后,未看到峰值,而是平滑的或陡峭的曲线。这种情况很常见,个人感觉是各层分割的起始尺度设置不合适引起的,不必烦恼,可以从20开始尝试,20、50、80,不怎么复杂就能试出起始尺度为多少时才会出峰值。另外,为了节约时间,还建议大家用小块地物相对丰富的研究区影像做实验,核心是因为大块影像和小块影像的最优尺度结果是相同的,亲测。
另外,ESP执行完之后会自动生成三个分割层,这三个分割层只是尺度估计的默认层数,并不是你最终的分割层数.
【参考文献】
1. Woodcock C E , Strahler A H . The factor of scale in remote sensing[J]. Remote Sensing of Environment, 1987, 21(3):311-332.
2. Drǎguţ L , Tiede, D., Levick, S., 2010. ESP: a tool to estimate scale parameters for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 24 (6), 859–871.
3. Drǎguţ L , Eisank, C., 2012. Automated object-based classifification of topography from SRTM data. Geomorphology 141–142, 21–33.
4. Drǎguţ L , Csillik O , Eisank C , et al. 2014.Automated parameterisation for multi-scale image segmentation on multiple layers[J]. Isprs Journal of Photogrammetry & Remote Sensing. 88:119-127.
5. ESP 2_User Guide