Linux与倍福ADS通信
倍福虚拟学院:C++ ADS 通讯

倍福提供了官方的GitHub支持,阅读后发现支持还是很全面的
https://github.com/Beckhoff/ADS

用adstool进行一些简单的测试,可以获取netid,但是获取其它信息时则会报错
redwall@redwall-G3-3500:~/ADS/build$ ./adstool 169.254.254.142 netid
169.254.142.16.1.1
redwall@redwall-G3-3500:~/ADS/build$ ./adstool 169.254.254.142.1.1 license systemid
2022-09-27T17:24:59+0800 Error: AdsException message: Ads operation failed with error code 6.
按照下边的博客进行简单的通讯测试
linux系统的ROS与倍福PLC之间利用ADS实现通讯
这里会涉及到官方提供的ADS库的编译与链接,CMakeLists.txt如下
cmake_minimum_required(VERSION 2.8)
project(ads_test)
set(CMAKE_CXX_STANDARD "14")
set(CMAKE_CXX_COMPILER "g++")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -pthread")
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
include_directories(${PROJECT_SOURCE_DIR}/include)
include_directories(${PROJECT_SOURCE_DIR}/AdsLib)
#添加ADS库
set(SOURCES
AdsLib/AdsDef.cpp
AdsLib/AdsDevice.cpp
AdsLib/AdsFile.cpp
AdsLib/AdsLib.cpp
AdsLib/Frame.cpp
AdsLib/LicenseAccess.cpp
AdsLib/Log.cpp
AdsLib/RouterAccess.cpp
AdsLib/RTimeAccess.cpp
AdsLib/Sockets.cpp
AdsLib/standalone/AdsLib.cpp
AdsLib/standalone/AmsConnection.cpp
AdsLib/standalone/AmsNetId.cpp
AdsLib/standalone/AmsPort.cpp
AdsLib/standalone/AmsRouter.cpp
AdsLib/standalone/NotificationDispatcher.cpp
)
add_library(ads ${SOURCES})
target_include_directories(ads PUBLIC ./AdsLib)
if(CMAKE_CXX_COMPILER_ID STREQUAL "MSVC")
target_link_libraries(ads PUBLIC wsock32)
endif()
if(WIN32 EQUAL 1)
target_link_libraries(ads PUBLIC ws2_32)
endif()
#添加测试程序
add_executable(link_test src/link_test.cpp)
target_link_libraries(link_test ads)
link_test.cpp
#include "AdsLib.h"
#include "AdsNotification.h"
#include "AdsVariable.h"
#include 但可能是一些细节没有注意到,没有成功
redwall@redwall-G3-3500:~/Test/ADS_test/bin$ ./link_test
terminate called after throwing an instance of 'AdsException'
what(): Ads operation failed with error code 1861.
已放弃 (核心已转储)
上位机使用C++通过ADS协议与倍福PLC通信例程-布尔变量的读取
关于倍福EtherCAT3的ADS通讯
把下面的博客又稍微仔细得看了一遍
TwinCAT3与ROS之间的ADS通信实现
又对倍福ADS通信做了简单了解
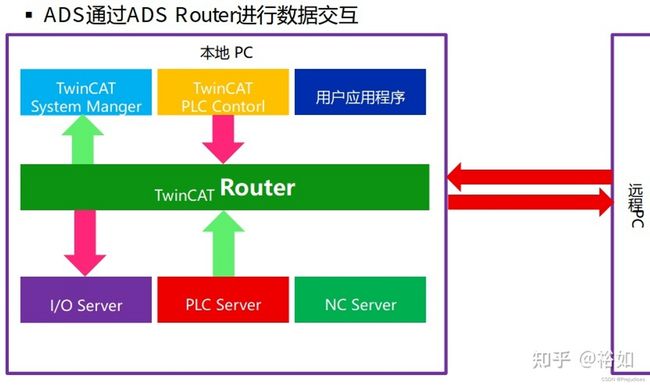
倍福EtherCAT的ADS通讯
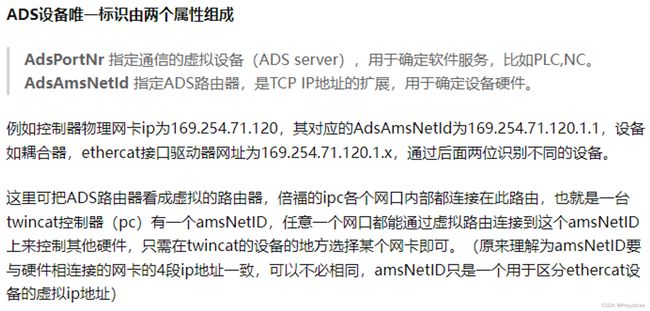
我将倍福与编程PC的AdsAmsNetId均设置为与其IPV4地址相对应
//倍福
169.254.254.142
169.254.254.142.1.1
//编程PC
169.254.254.100
169.254.254.100.1.1
//Ubuntu
169.254.254.88
169.254.254.88.1.1
这里用了一个交换机,交换机的供电比较粗糙,后面要加一个专门的头
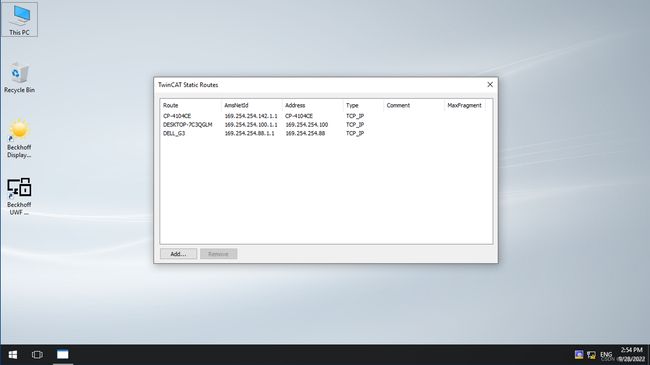
看博客中说要在TwinCAT中设置静态路由,这一步卡了好久,远程登录Windows添加总是报错
倍福TwinCAT3 Ads错误快查
倍福TwinCAT无法添加ADS路由的排查方法
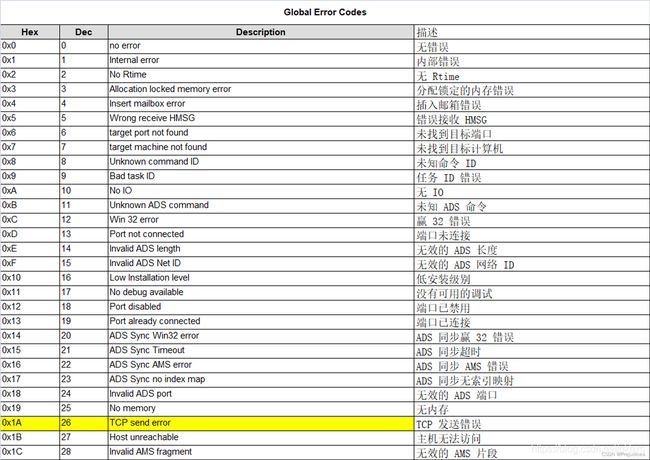
虽然能大概知道错误原因,但也不知道解决方法
最后用官方提供的adstool成功添加
redwall@redwall-G3-3500:~/ADS/build$ ./adstool 169.254.254.142 addroute --addr=169.254.254.88 --netid=169.254.254.88.1.1 --password=1 --routename=DELL_G3
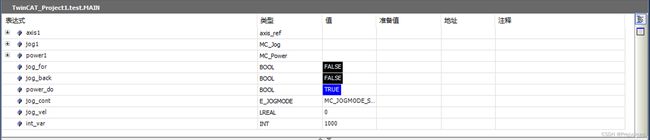
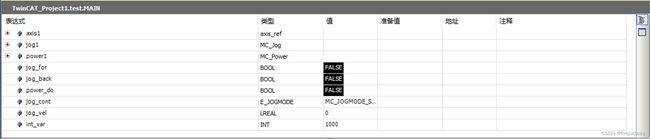
对link_test.cpp简单修改,打印通信信息,获取电机使能布尔量状态并反转
#include "AdsLib.h"
#include "AdsNotification.h"
#include "AdsVariable.h"
#include redwall@redwall-G3-3500:~/Test/ADS_test/bin$ ./link_test
Device name:Plc30 App
ADS version:
Local port:30000
ADS state:5
Device state:0
Motor enabled!
Motor disabled!
Motor enabled!
Motor disabled!
Motor enabled!
Motor disabled!
Motor enabled!
Motor disabled!
可以在编程PC中观察到值的变化,或者直接触摸判断电机是否使能