一、反向传播的由来
在我们开始DL的研究之前,需要把ANN—人工神经元网络以及bp算法做一个简单解释。
关于ANN的结构,我不再多说,网上有大量的学习资料,主要就是搞清一些名词:
输入层/输入神经元,输出层/输出神经元,隐层/隐层神经元,权值,偏置,激活函数
接下来我们需要知道ANN是怎么训练的,假设ANN网络已经搭建好了,在所有应用问题中(不管是网络结构,训练手段如何变化)我们的目标是不会变的,那就是网络的权值和偏置最终都变成一个最好的值,这个值可以让我们由输入可以得到理想的输出,于是问题就变成了y=f(x,w,b)(x是输入,w是权值,b为偏置,所有这些量都可以有多个,比如多个x1,x2,x3……最后f()就好比我们的网络它一定可以用一个函数来表示,我们不需要知道f(x)具体是怎样的函数,从小我们就认为只要是函数就一定要是可表示的,像f(x)=sin(x)一样,但是请摈弃这样的错误观念,我们只需要知道一系列的w和b决定了一个函数f(x),这个函数让我们由输入可以计算出合理的y)
最后的目标就变成了尝试不同的w,b值,使得最后的y=f(x)无限接近我们希望得到的值t
但是这个问题依然很复杂,我们把它简化一下,让(y-t)^2的值尽可能的小。于是原先的问题化为了C(w,b)=(f(x,w,b)-t)^2取到一个尽可能小的值。这个问题不是一个困难的问题,不论函数如何复杂,如果C降低到了一个无法再降低的值,那么就取到了最小值(假设我们不考虑局部最小的情况)
如何下降?数学告诉我们对于一个多变量的函数f(a,b,c,d,……)而言,我们可以求得一个向量,它称作该函数的梯度,要注意的是,梯度是一个方向向量,它表示这个函数在该点变化率最大的方向(这个定理不详细解释了,可以在高等数学教材上找到)于是C(w,b)的变化量ΔC就可以表示成
其中
 是该点上的微小变化,我们可以随意指定这些微小变化,只需要保证ΔC<0就可以了,但是为了更快的下降,我们为何不选在梯度方向上做变化呢?
是该点上的微小变化,我们可以随意指定这些微小变化,只需要保证ΔC<0就可以了,但是为了更快的下降,我们为何不选在梯度方向上做变化呢?
事实上,梯度下降的思想就是这样考虑的,我们使得 从而保证C一直递减,而对于w来说只要每次更新
从而保证C一直递减,而对于w来说只要每次更新
即可。
ok,到这里,似乎所有的问题都解决了,让我们重新整理一下思绪,我们将问题转化了很多步:
网络权值偏置更新问题 ==> f(x,w,b)的结果逼近t ==> C(w,b)=(f(x,w,b)-t)^2取极小值问题 ==> C(w,b)按梯度下降问题 ==>取到极小值,网络达到最优
千万别忘了一点!!推导基于一个前提:我们已经提前知道了当前点的梯度。然而事实并非如此!!
这个问题困扰了NN研究者多年,1969年M.Minsky和S.Papert所著的《感知机》一书出版,它对单层神经网络进行了深入分析,并且从数学上证明了这种网络功能有限,甚至不能解决象"异或"这样的简单逻辑运算问题。同时,他们还发现有许多模式是不能用单层网络训练的,而对于多层网络则没有行之有效的低复杂度算法,最后他们甚至认为神经元网络无法处理非线性问题。然而于1974年,Paul Werbos首次给出了如何训练一般网络的学习算法—back propagation。这个算法可以高效的计算每一次迭代过程中的梯度,让以上我们的推导得以实现!!
不巧的是,在当时整个人工神经网络社群中无人知晓Paul所提出的学习算法。直到80年代中期,BP算法才重新被David Rumelhart、Geoffrey Hinton及Ronald Williams、David Parker和Yann LeCun独立发现,并获得了广泛的注意,引起了人工神经网络领域研究的第二次热潮。
二、原理的引入
上面已经提到,所谓反向传播,就是计算梯度的方法。对于反向传播,先不急着介绍它的原理,很多文章直接引入公式,反而使得我们很难去理解。这里先引入知乎上某位大神的回答。
来源:知乎https://www.zhihu.com/question/27239198?rf=24827633
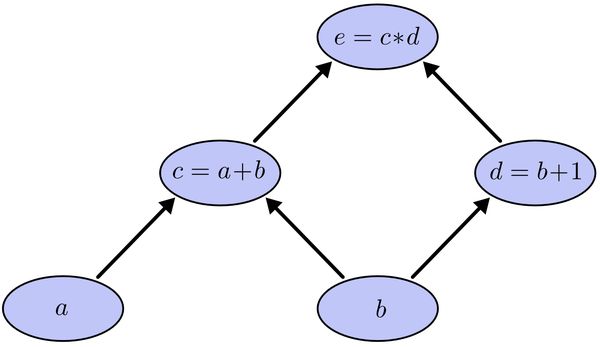
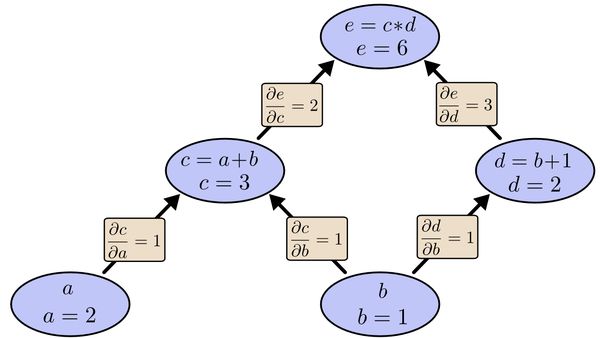
假设输入a=2,b=1,在这种情况下,我们很容易求出相邻节点之间的偏导关系
利用链式法则:
以及
的值等于从a到e的路径上的偏导值的乘积,而的值等于从b到e的路径1(b-c-e)上的偏导值的乘积加上路径2(b-d-e)上的偏导值的乘积。也就是说,对于上层节点p和下层节点q,要求得,需要找到从q节点到p节点的所有路径,并且对每条路径,求得该路径上的所有偏导数之乘积,然后将所有路径的 “乘积” 累加起来才能得到的值。
这种情况下偏导很容易求得,因为我们已经知道网络的函数关系式,e=(a+b)*(b+1),这是一个没有权值干预,已知输入与输出之间关系的网络。实际当中我们只是知道e与输出之间的关系,就是上面说的C=(y-t)^2,而且会有成千上万的权值和偏置干预求导的过程。那么换个思路,能不能求输出对结果的偏导呢?
再利用上图的关系。节点c对e偏导2并将结果堆放起来,节点d对e偏导3并将结果堆放起来,至此第二层完毕,求出各节点总堆放量并继续向下一层发送。节点c向a发送2*1并对堆放起来,节点c向b发送2*1并堆放起来,节点d向b发送3*1并堆放起来,至此第三层完毕,节点a堆放起来的量为2,节点b堆放起来的量为2*1+3*1=5, 即顶点e对b的偏导数为5。简要的概括,就是从最上层的节点e开始,以层为单位进行处理。对于e的下一层的所有子节点,将1乘以e到某个节点路径上的偏导值,并将结果“堆放”在该子节点中。等e所在的层按照这样传播完毕后,第二层的每一个节点都“堆放"些值,然后我们针对每个节点,把它里面所有“堆放”的值求和,就得到了顶点e对该节点的偏导。然后将这些第二层的节点各自作为起始顶点,初始值设为顶点e对它们的偏导值,以"层"为单位重复上述传播过程,即可求出顶点e对每一层节点的偏导数。
三、一个很好的例子
现在,我们再把权值考虑进去,以下是一个很好的例子,有助于我们去理解反向传播
来源:Charlotte77的博客 http://www.cnblogs.com/charlotte77/p/5629865.html
假设,你有这样一个网络层:
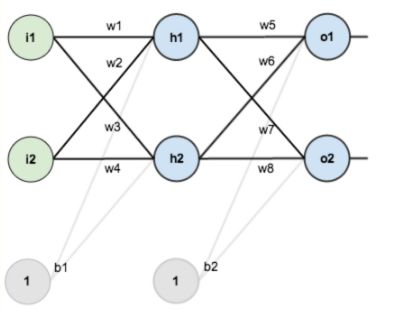
第一层是输入层,包含两个神经元i1,i2,和截距项b1;第二层是隐含层,包含两个神经元h1,h2和截距项b2,第三层是输出o1,o2,每条线上标的wi是层与层之间连接的权重,激活函数我们默认为sigmoid函数。
现在对他们赋上初值,如下图:
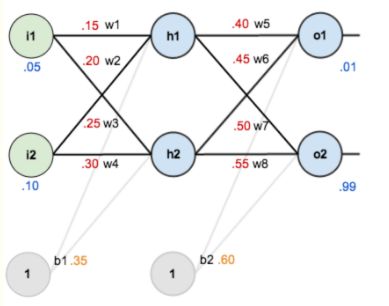
其中,输入数据 i1=0.05,i2=0.10;
输出数据 o1=0.01,o2=0.99;
初始权重 w1=0.15,w2=0.20,w3=0.25,w4=0.30;
w5=0.40,w6=0.45,w7=0.50,w8=0.88
目标:给出输入数据i1,i2(0.05和0.10),使输出尽可能与原始输出o1,o2(0.01和0.99)接近。
Step 1 前向传播
1.输入层---->隐含层:
计算神经元h1的输入加权和:
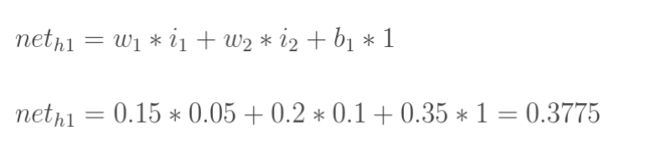
神经元h1的输出o1:(此处用到激活函数为sigmoid函数):

同理,可计算出神经元h2的输出o2:

2.隐含层---->输出层:
计算输出层神经元o1和o2的值:
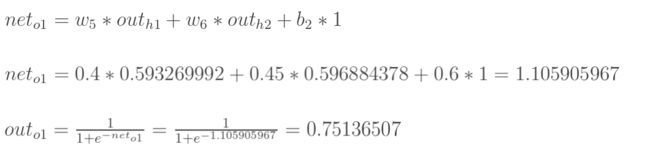

这样前向传播的过程就结束了,我们得到输出值为[0.75136079 , 0.772928465],与实际值[0.01 , 0.99]相差还很远,现在我们对误差进行反向传播,更新权值,重新计算输出。
Step 2 反向传播
1.计算总误差
总误差:(square error)

但是有两个输出,所以分别计算o1和o2的误差,总误差为两者之和:


2.隐含层---->输出层的权值更新:
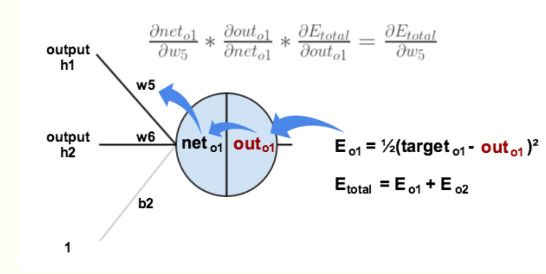
以权重参数w5为例,如果我们想知道w5对整体误差产生了多少影响,可以用整体误差对w5求偏导求出:(链式法则)
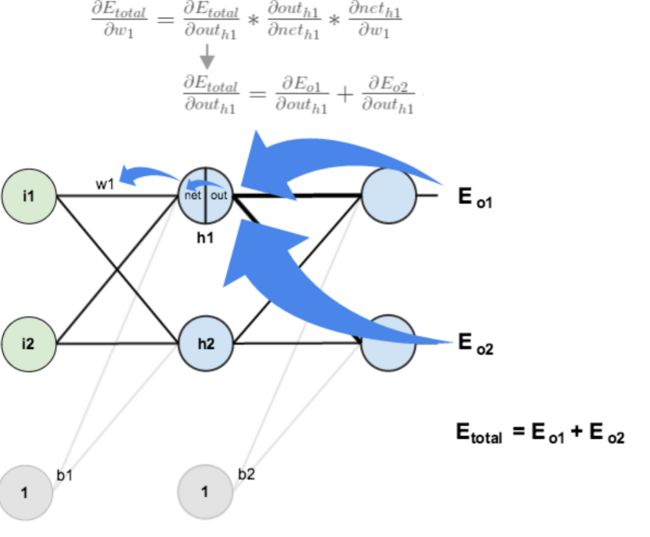
下面的图可以更直观的看清楚误差是怎样反向传播的:
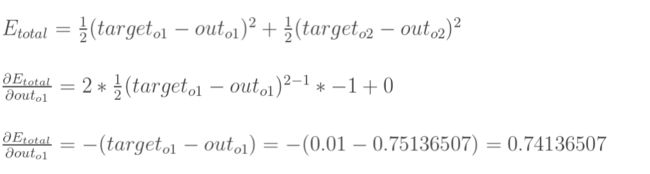
现在我们来分别计算每个式子的值:
计算 :
:
计算 :
:

(这一步实际上就是对sigmoid函数求导,比较简单,可以自己推导一下)
计算 :
:

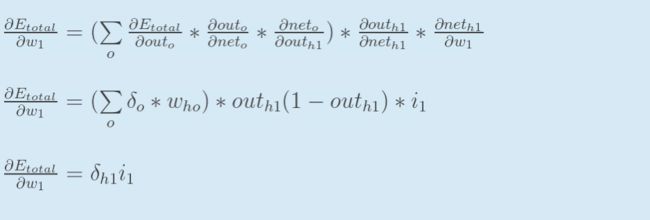
最后三者相乘:

这样我们就计算出整体误差E(total)对w5的偏导值。
回过头来再看看上面的公式,我们发现:

为了表达方便,用 来表示输出层的误差:
来表示输出层的误差:
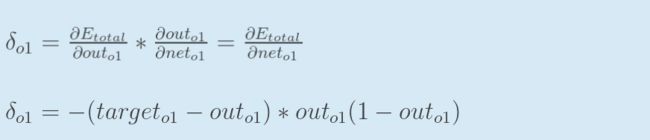
因此,整体误差E(total)对w5的偏导公式可以写成:

如果输出层误差计为负的话,也可以写成:

最后我们来更新w5的值:

(其中, 是学习速率,这里我们取0.5)
是学习速率,这里我们取0.5)
同理,可更新w6,w7,w8:

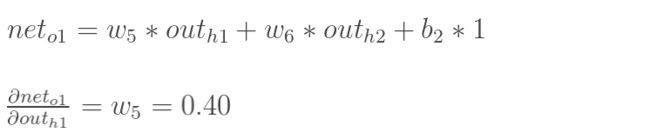
3.隐含层---->隐含层的权值更新:
方法其实与上面说的差不多,但是有个地方需要变一下,在上文计算总误差对w5的偏导时,是从out(o1)---->net(o1)---->w5,但是在隐含层之间的权值更新时,是out(h1)---->net(h1)---->w1,而out(h1)会接受E(o1)和E(o2)两个地方传来的误差,所以这个地方两个都要计算。
计算 :
:

先计算 :
:



同理,计算出:
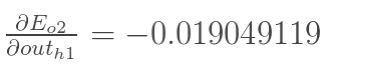
两者相加得到总值:

再计算 :
:

再计算 :
:

最后,三者相乘:

为了简化公式,用sigma(h1)表示隐含层单元h1的误差:
最后,更新w1的权值:

同理,额可更新w2,w3,w4的权值:

这样误差反向传播法就完成了,最后我们再把更新的权值重新计算,不停地迭代,在这个例子中第一次迭代之后,总误差E(total)由0.298371109下降至0.291027924。迭代10000次后,总误差为0.000035085,输出为[0.015912196,0.984065734](原输入为[0.01,0.99]),证明效果还是不错的
四、最一般的情况
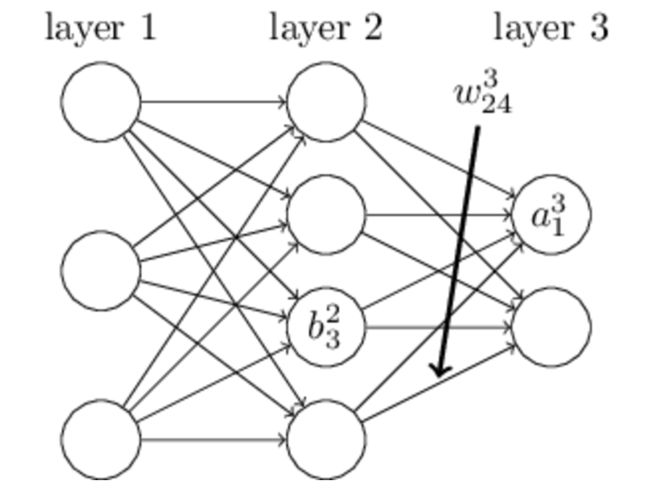
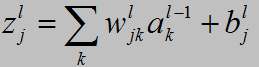
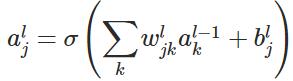
上图是一个三层人工神经网络,layer1至layer3分别是输入层、隐藏层和输出层。如图,先定义一些变量:

表示第l-1层的第
![]()
k个神经元连接到第
![]()
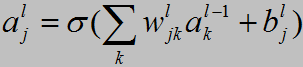
l层的第
![]()
j个神经元的权重;
其中

表示激活函数。
![]()
L表示神经网络的最大层数,也可以理解为输出层。
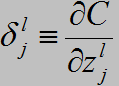
将第l层第
![]()
j个神经元中产生的错误(即实际值与预测值之间的误差)定义为:
代价函数,依然用C来表示
![]()
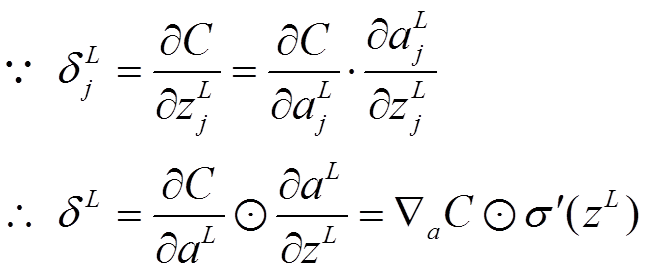
以上4个方程中,第一个方程其实不难理解,就是求输出对估价函数C的偏导。
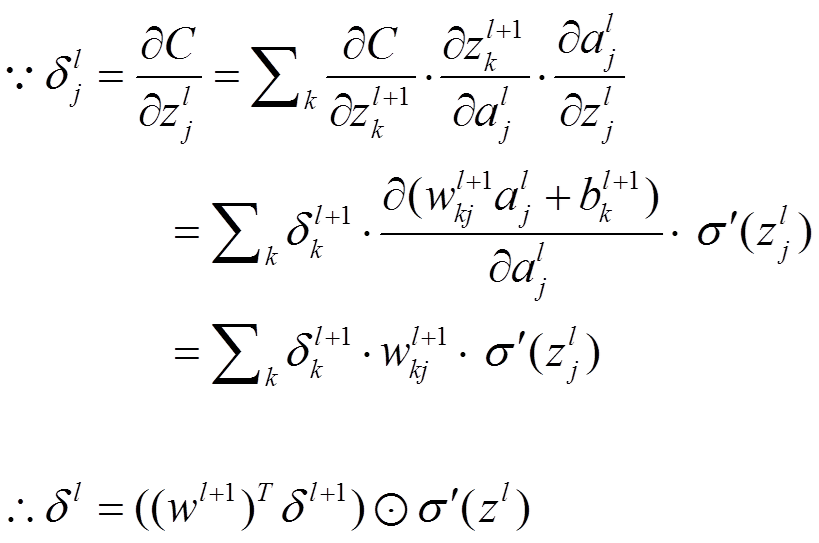
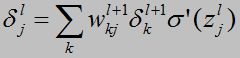
唯一比较困难的,就是第二个方程,它给出了根据下一层的错误量δl+1计算δl的等式。为证明该等式,我们先依据δkl+1=∂C/∂zkl+1重新表达下等式δlj =∂C/∂zlj。这里可以应用链式法则:

在最后一行,我们互换了下表达式右侧的两项,并取代了 δkl+1的定义。为了对最后一行的第一项求值,注意:
作微分,我们得到
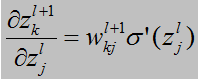
代回 (42) 我们得到
这就是以分量形式呈现的 (BP2)。后两式在完成了BP2证明之后就不太难了,留给读者来证明。
四、证明
反向传播算法(Backpropagation)是目前用来训练人工神经网络(Artificial Neural Network,ANN)的最常用且最有效的算法。其主要思想是:
(1)将训练集数据输入到ANN的输入层,经过隐藏层,最后达到输出层并输出结果,这是ANN的前向传播过程;
(2)由于ANN的输出结果与实际结果有误差,则计算估计值与实际值之间的误差,并将该误差从输出层向隐藏层反向传播,直至传播到输入层;
(3)在反向传播的过程中,根据误差调整各种参数的值;不断迭代上述过程,直至收敛。
反向传播算法的思想比较容易理解,但具体的公式则要一步步推导,因此本文着重介绍公式的推导过程。
1. 变量定义
上图是一个三层人工神经网络,layer1至layer3分别是输入层、隐藏层和输出层。如图,先定义一些变量:
其中

![]()
表示激活函数。
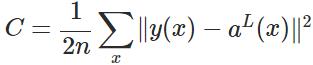
2. 代价函数
代价函数被用来计算ANN输出值与实际值之间的误差。常用的代价函数是二次代价函数(Quadratic cost function):
3. 公式及其推导
本节将介绍反向传播算法用到的4个公式,并进行推导。 如果不想了解公式推导过程,请直接看第4节的算法步骤。
首先,将第

![]()
层第
![]()

个神经元中产生的错误(即实际值与预测值之间的误差)定义为:
本文将以一个输入样本为例进行说明,此时代价函数表示为:
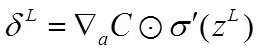
公式1(计算最后一层神经网络产生的错误):
其中,
![]()

表示Hadamard乘积,用于矩阵或向量之间点对点的乘法运算。公式1的推导过程如下:
公式2(由后往前,计算每一层神经网络产生的错误):
推导过程:
公式3(计算权重的梯度):
推导过程:
公式4(计算偏置的梯度):
推导过程:
4. 反向传播算法伪代码
- 对于训练集中的每个样本x,设置输入层(Input layer)对应的激活值
![]()
 :
:

,
-
- 反向传播错误:
![]()
- 使用梯度下降(gradient descent),训练参数:
 表示第
表示第
 表示第
表示第
 表示第l
表示第l
 表示第
表示第

 个神经元连接到第
个神经元连接到第
 表示第
表示第
 表示第
表示第

 表示第
表示第

 表示实际的分类,
表示实际的分类,
 表示预测的输出,
表示预测的输出,
 表示神经网络的最大层数。
表示神经网络的最大层数。