SLAM面经整理
目录
-
-
- 1.ORBSLAM的哪个部分最耗时?
- 2.SLAM后端H矩阵求解的算法复杂度是多少?如何去加速后端求解?
- 3.如何求解Ax = b ? SVD和QR分解哪个更快?
- 4. ORBSLAM怎么克服尺度漂移问题?回环的原理及其估计了哪些量?⭐
- 5.SLAM开源算法之间的对比,优劣性?
- 6.对于光照明暗变化,动态场景,视觉SLAM如何去解决?
- 7.长廊问题怎么办?
- 8.ORBSLAM初始化步骤?++
- 9.RANSAC的原理?
- 10.单应矩阵为什么只有8个自由度?
- 11. git的相关操作?
- 12.PNP求解最少需要几个点?只有一个点的自由度是多少?两个呢?
-
1.ORBSLAM的哪个部分最耗时?
答: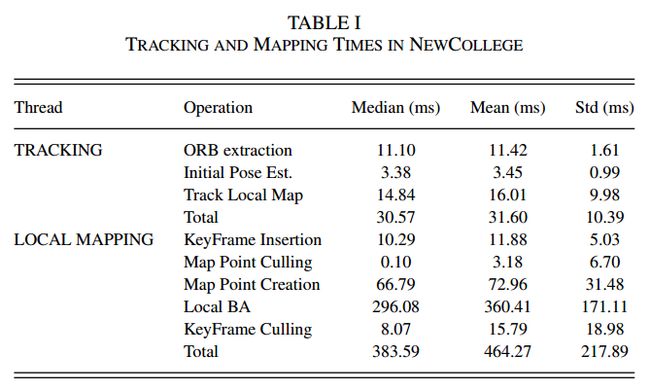
Local BA.
- Local BA主要分为11步
- Step1: 将当前关键帧及其共视关键帧加入lLocalKeyFrames
- Step2: 遍历lLocalKeyFrames中(一级)关键帧,将它们观测的MapPoints加入到lLocalMapPoints中
- Step3: 得到能被局部MapPoints观测到,但不属于局部关键帧的(二级)关键帧,这些关键帧在局部BA优化时不优化
- Step4: 构造g2o优化器
- Step5: 添加待优化的位姿顶点:Pose of Local KeyFrame
- Step6: 添加不优化的位姿顶点:Pose of Fixed KeyFrame,注意这里调用了vSE3->setFixed(true) (为了增加约束信息)
- Step7: 添加待优化的3D地图点顶点
- Step8: 在添加完了一个地图点之后, 对每一对关联的MapPoint和KeyFrame构建边
- Step9: 开始优化(分为两个阶段:阶段1使用核函数,阶段2属于精求解,不再使用核函数,排除阶段1误差较大的outlier后再次优化)
- Step10: 在优化后重新计算误差,剔除连接误差比较大的关键帧和MapPoint
- Step11: 优化后更新关键帧位姿以及地图点的位置、平均观测方向等属性
2.SLAM后端H矩阵求解的算法复杂度是多少?如何去加速后端求解?
(1) 如果直接对H矩阵求逆来计算增量方程,复杂度为O( n 3 n^3 n3).
(2) 可以利用H的稀疏结构来加速运算:
将H Δx = g 的H矩阵划分为4个块: [ B E E T C ] \begin{bmatrix} B & E~ \\ E^T & C~ \end{bmatrix} \quad [BETE C ] [ Δ x c Δ x p ] \begin{bmatrix} Δxc~ \\ Δxp~ \end{bmatrix} \quad [Δxc Δxp ] = [ v w ] ~\begin{bmatrix} v~ \\ w~ \end{bmatrix} \quad [v w ]
=> [ B − E C − 1 E T 0 E T C ] \begin{bmatrix} B-EC^-1 E^T & 0~ \\ E^T & C~ \end{bmatrix} \quad [B−EC−1ETET0 C ] [ Δ x c Δ x p ] \begin{bmatrix} Δxc~ \\ Δxp~ \end{bmatrix} \quad [Δxc Δxp ] = [ v − E C − 1 w w ] ~\begin{bmatrix} v-EC^-1w~ \\ w~ \end{bmatrix} \quad [v−EC−1w w ]
再利用Marginalization(Schur消元)来分步求解:
- [ B − E C − 1 E T ] \begin{bmatrix} B-EC^-1E^T \end{bmatrix} \quad [B−EC−1ET] Δ x c Δxc Δxc = v - EC-1 w => Δ x c Δxc Δxc
- ET Δ x c Δxc Δxc + C Δ x p Δxp Δxp = w => Δ x p Δxp Δxp
3.如何求解Ax = b ? SVD和QR分解哪个更快?
首先直接给出AX=B解的情况:
- (1)R(A)< r(A|B),方程组无解
- (2)r(A)=r(A|B)=n,方程组有唯一解
- (3)r(A)=r(A|B) < n, 方程组有无穷解
- (4)r(A)>r(A|B),这种情况不存在
上式的解为 x = A-1B,这里A为可逆或伪逆矩阵.
SLAM中的最小二乘问题就是用来解决第二、三种情况求最优解。当出现第二种情况下(也就是A满秩下,称为满秩最小二乘问题),为了提高效率通常使用QR分解、LTLD分解、Cholesky分解和SVD分解(奇异分解)等。当出现第三种情况时(也就是A秩亏,称为亏秩最小二乘问题),只能使用SVD分解方法,其他方法将失效。
首先说下结论:QR分解比SVD更快,但SVD更加稳定.
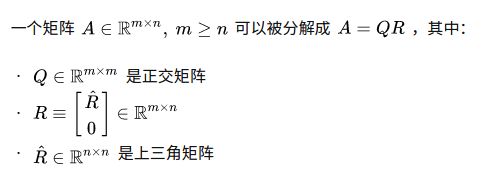
QR分解:

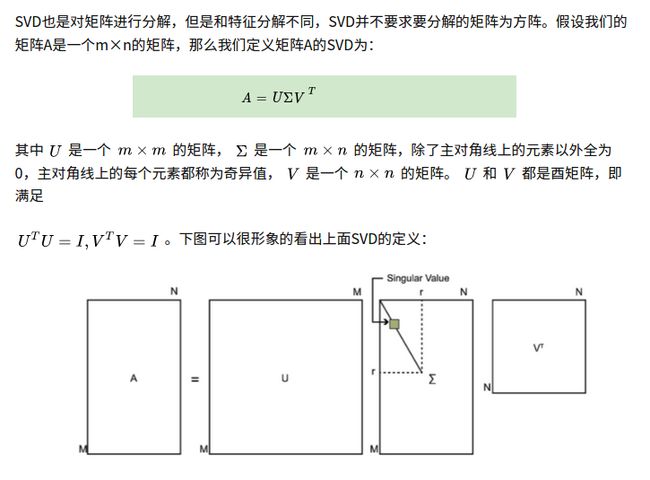
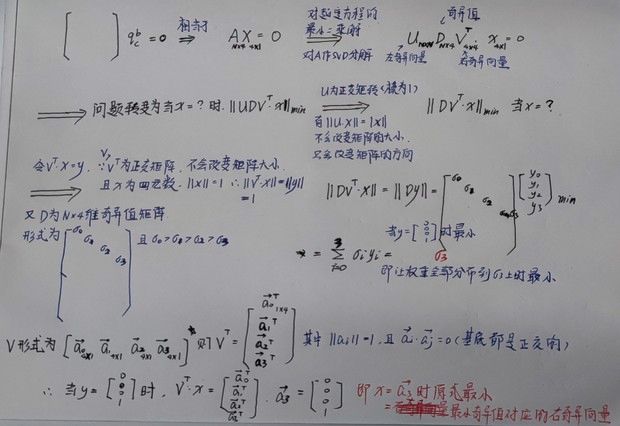
SVD分解:
4. ORBSLAM怎么克服尺度漂移问题?回环的原理及其估计了哪些量?⭐
回环检测是指:找到与当前帧4相似的关键帧1,这样的话就可以根据1直接估计4的位姿,而不是1–2–3–4。减少了误差传递。对于当前帧4的共视帧6,可以1—4—6来获得,而不是1–2–3–4–6(也就是回环校正,不过在回环校正的时候,还会去校正路标点坐标)。
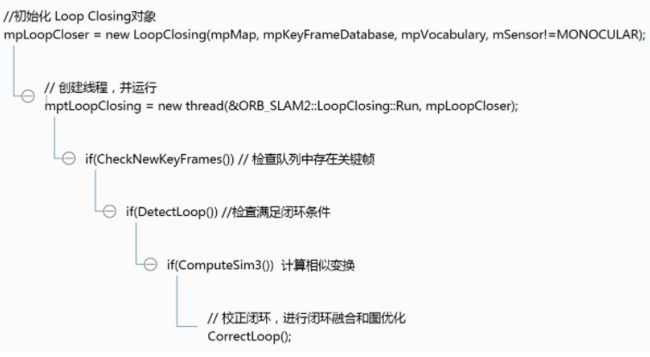
- 检查闭环检测队列是否存在关键帧
- 检测回环候选帧
step2.1 从闭环检测队列中取出一个共视关键帧,作为当前检测的闭环关键帧
step2.2 如果距离上一次闭环小于10帧,或者地图中关键帧没有超过10帧,不进行闭环检测

step2.3 遍历当前检测的关键帧(红色点)的所有连接的共视关键帧,计算当前关键帧与每个共视关键帧的词袋相似度得分,并得到最低的分数(要保证闭环候选关键帧与当前关键帧的相似度得分大于当前关键帧与连接的共视关键帧得分的最低值)
step2.4 在所有关键帧中找到不与当前关键帧连接的闭环候选帧
获得了几个闭环候选帧并不能说明存在闭环,闭环必须是满足连续闭环的。考虑连续性需要将上一次闭环检测的连续组与当前闭环候选帧构建的连续组是否存在连续性(判断条件就是两个连续组中是否有同一个关键帧),判断成功后会记录连续成功的次数,只有当连续成功的次数大于3次才认为这个关键帧是真正的闭环候选帧,放入mvpEnoughconsistentCandidates中
step2.5:在候选帧中检测具有连续性的候选帧(每个候选关键帧与自己相连的关键帧构成一个子候选组,检测子候选组中的关键帧是否也存在与子连续组(上一次回环检测的连续组)中,存在则连续性+1,如果连续性大于3则认为该关键帧是真正的闭环候选帧)
一致性检查
- 计算sim3
考虑到单目相机的尺度漂移,计算当前帧与候选闭环帧的sim3变换,而不是T。这里的sim3求解是对当前关键帧和闭环候选帧之间匹配的MapPoint进行sim3求解
step3.1 从筛选后的闭环候选帧中取出一帧有效的关键帧,并与当前帧通过词袋进行匹配
step3.2 对匹配点数>20的候选闭环候选帧构建一个SIM3求解器
step3.3 对每个符合要求的候选帧进行sim3迭代匹配,来搜索两个关键帧中更多的匹配点对。并使用新的匹配构建优化器来优化sim3.只要有一个闭环候选帧通过了SIM3的求解和优化,就跳出对其他候选帧的判断。
Sim3相似变换群,有7个自由度,即一个尺度因子s,3个旋转角度,3个位移,即[sR|t]
- 闭环融合
闭环矫正的第一步是融合重复的点云,并且在共视图中插入新的边以连接闭环。首先当前帧的位姿会根据相似变换(sim3结果)被矫正,同时所有与其相连的关键帧位姿也会被矫正。所有的被闭环处的关键帧观测到的地图点会通过映射在一个小范围里,然后去搜索它的近邻匹配。这样就可以对所有匹配的点云进行更加有效地数据融合,并更新关键帧位姿,以及在图中的边。
(1)在上一帧计算当前帧和闭环帧的Sim3位姿变换时,建立了闭环帧及其共视帧的路标点与当前帧的联系,因此先更新共视图。
(2)根据计算的当前帧和闭环帧的Sim3变换,去更新当前帧及其共视帧的位姿,以及路标点的坐标。
(3)因为闭环帧已经经过了多次优化,认为是精确的,因此建立闭环帧及其共视帧的路标点与当前帧及其共视帧的联系,进行路标点的匹配、融合。
(4)优化本质图(只优化位姿)
(5)建立一个全局BA优化线程
- Essential Graph优化
为了有效完成闭环,使用了本质图去优化位姿图(只优化位姿)。这样就可以将闭环的误差分散到整个图中。
回环优化了哪些量:
- 当前帧和回环候选帧之间的sim3(相似变换矩阵)
- 当前关键帧的位姿和地图点
5.SLAM开源算法之间的对比,优劣性?

6.对于光照明暗变化,动态场景,视觉SLAM如何去解决?
针对光照明暗变化:
- 1.在相机上放置滤光片
- 2.采用多传感器融合技术
针对于动态场景:
-
1.ransac方法: 将运动的点视为outlier处理,但是当运动的物体占据图像大部分比例时失效
-
2.前景背景的分割: 通过像素灰度和目标深度的变化,分辨前景和背景,前景是动的,背景是静止的
-
3.光流、场景流(三维光流): 通过像素灰度变化,推测出运动物体的运动方向和速度
-
4.多传感器融合: 将相机与IMU,轮式里程计等的结合,或者得到相机的运动先验信息
-
5.几何约束: 利用静态特征点的三维空间相对位置不变可以分离静态特征点。还有投影关系也可以用
-
6.目标识别:识别可能会移动的物体(例如人),将其去除
-
7.建立运动模型:存在动态特征点就存在多个运动模型,找出一个最好的模型
7.长廊问题怎么办?
长廊问题: 机器人在经过长走廊弱纹理场景引起的累积误差问题.
解决方法:
- 利用多传感器融合,结合IMU信息或里程计信息
- 上海交通大学邹丹平等提出一种基于结构化环境特征的 StructSLAM 系统,在纹理缺失的情况下,线条可增强系统的鲁棒性。
8.ORBSLAM初始化步骤?++
初始化追踪线程
-
从配置文件中加载相机参数
-
加载ORB特征点相关的参数,并新建特征点提取器(建立金字塔,计算每层需要提取的特征点个数)
-
初始化帧 :
step1 对单目图像进行特征点提取
step 1.1 :构建金字塔
step 1.2 :计算图像特征点(Fast)并对特征点使用四叉树均匀化
step 1.3 :对图像进行高斯模糊
step 1.4 :计算高斯模糊后图像的描述子
step 1.5 :对非第0层图像中的特征点的坐标恢复到第0层图像(原图像)的坐标系下
step2 用OpenCV的矫正函数、内参对提取到的特征点进行矫正
Step3 计算去畸变后图像边界,将特征点分配到网格中。 -
初始化地图
step1 创建单目初始器step2 如果当前帧特征点数太少(不超过100),则重新构造初始器
Step3 在mInitialFrame与mCurrentFrame中找匹配的特征点对,如果初始化的两帧之间的匹配点太少(<100),重新初始化 (同step2)
step 3.1 :构建旋转直方图
step 3.2 :在F2半径窗口内搜索当前F2所有相对于F1的候选匹配特征点,找到最优和次优
step 3.3 :检查满足阈值,最优/次优比,以及直方图非前三的部分。Step4 通过H模型或F模型进行单目初始化,得到两帧间相对运动、初始MapPoints。返回是否成功初始化
step 4.1 :在所有匹配特征点对中随机选择8对匹配特征点为一组
step 4.2 :计算fundamental 矩阵 和homography 矩阵,为了加速分别开了线程计算
step 4.3 :计算得分比例来判断选取哪个模型来求位姿R,t float RH = SH/(SH+SF)Step5 初始化成功后,删除那些无法进行三角化的匹配点
初始化建图线程
初始化回环检测线程
初始化可视化线程
9.RANSAC的原理?
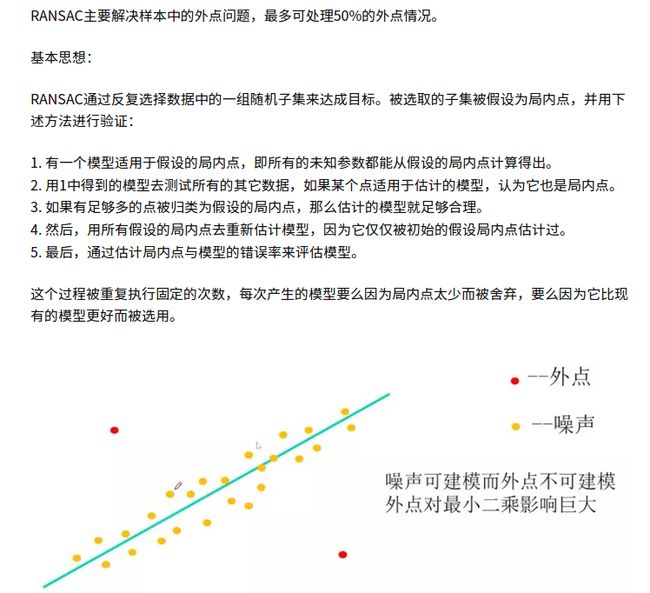
想要采样成功率达到 z z z 时所需的采样次数 M M M
- 公式: M = l o g ( 1 − z ) / l o g ( 1 − p k ) M = log(1-z)/log(1-p^k) M=log(1−z)/log(1−pk)
- 其中
k : 求解模型需要的最少点的个数
p : 内点的概率
p k p^k pk : k个点都是内点的概率
( 1 − p k ) M (1-p^k)^M (1−pk)M : M次全部失败的概率
z = 1 − ( 1 − p k ) M z=1-(1-p^k)^M z=1−(1−pk)M : M次采样至少有一次成功的概率.
10.单应矩阵为什么只有8个自由度?
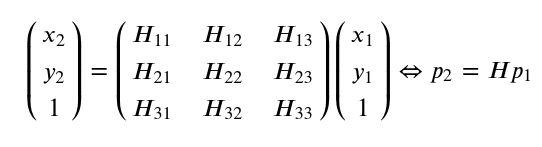
H矩阵使用了齐次坐标系,可以进行任意尺度的缩放(H33 = 1),所以单应矩阵只有8个自由度
11. git的相关操作?
- git init:在当前目录新建一个git代码库
- git clone
- git config : 显示当前git配置
- git add:添加指定目录到暂存区
- git rm: 删除工作区文件
- git mv:改名文件,并将这个改名放入暂存区
- git commit : 提交暂存区的指定文件到仓库区
- git branch:列出所有本地分支
- git checkout: 切换到指定分支
- git merge: 合并指定分支到当前分支
- git tag:列出所有tag
- git status:显示有变更的文件
- git log: 显示当前分支的版本历史
- git diff:显示暂存区和工作区的差异
- git push :推送分支到远程仓库
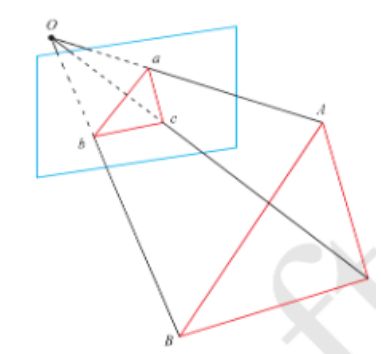
12.PNP求解最少需要几个点?只有一个点的自由度是多少?两个呢?
PnP(Perspective-n-point):多点透视成像,描述了当知道n个3D空间点及其投影位置时,如何估计相机的位姿.
PnP求解最少需要三个点对:P3P
 P3P的缺点:
P3P的缺点:
- 1.P3P只利用了3个点对的信息.当给定的配对点多于3组时,难以利用更多信息;
- 2.如果3D点或2D点受噪声影响,或者存在误匹配,则算法失效;
只有一个点对的自由度是4.两个点对的自由度是2