C#联合Openvino实现PP-TinyPose检测
1、配置好paddlepaddle环境,详见PaddleDetection环境搭建测试
2、下载PaddleDetection源码,并配置好PaddleDetection环境,测试paddle运行正常
3、下载vs2019或vs2022
4、下载cmake,https://cmake.org/download/
5、安装opencv,https://opencv.org/releases/
6、以上这些都是构建项目的必须组件,现在开始openvino的安装
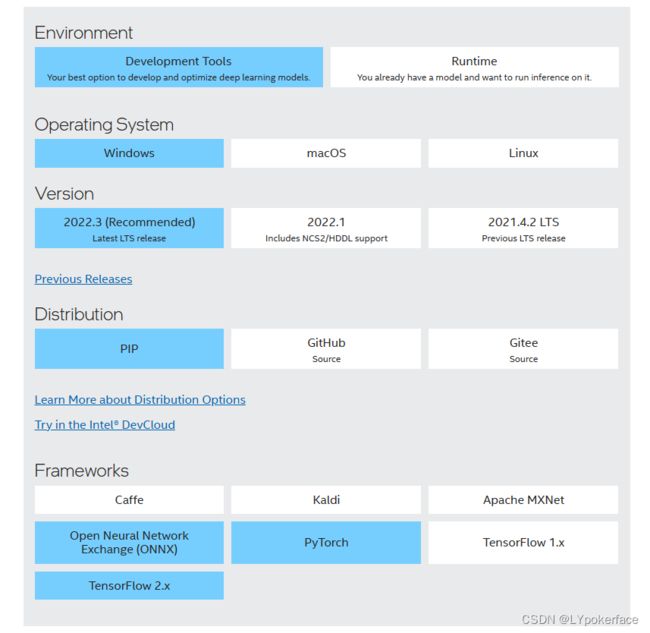
python下使用就直接PIP安装,安装Development Tools版本,如果是C++使用就安装runtime离线版本,后面C++内配置openvino需要用到runtime版本的dll和lib:

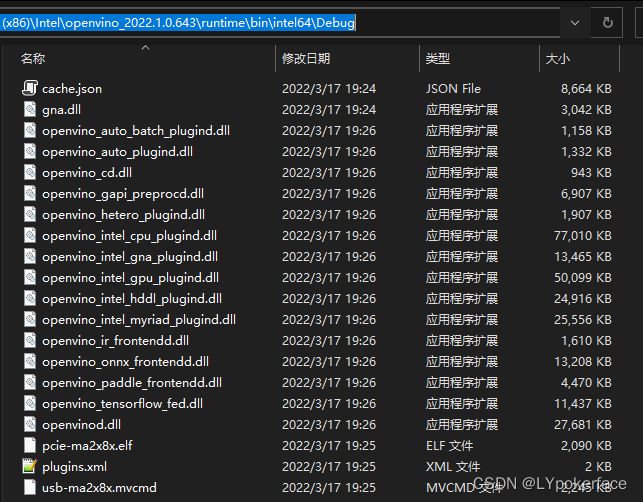
安装完成后,可以看到在C:\Program Files (x86)\Intel\openvino_2022.1.0.643文件夹中已经有相关的文件,python也可以把离线包内的Python包拷贝到conda环境使用,但建议还是直接Pip方便
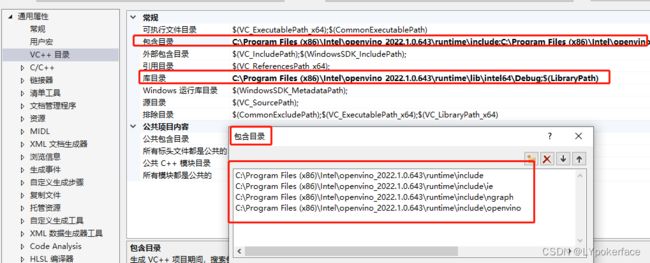
7、在vs内配置好opencv和openvino的库,都一样配置好三个地方就行,用属性表配置方便,用release还是debug版本根据需要选择就行:
包含目录、库目录、附加依赖项
openvino:

opencv:


8.增加OpenVinoAPI.cpp文件,代码引用自https://mp.weixin.qq.com/s/gOoeMPeAcvMSeGVqToKWuQ
// OpenVINO C++ dll code for C#
// 该项目支持模型格式:
// 1. paddlepaddle飞桨模型(.pdmodel)
// 2. onnx中间格式(.onnx)
// 3. OpenVINO的IR格式(.xml)
// 针对该项目所使用测试网络:
// 1. PaddleClas 图像分类模型 花卉种类识别网络的(.pdmodel)、(.onnx)、(.xml)格式;
// 2. Paddledetection 目标检测模型 车辆识别网络的(.pdmodel)格式;
// ONLY support batchsize = 1
#include