RoboMaster 视觉 摄像头教程
RoboMaster视觉教程(1)
摄像头
摄像头参数
主流有CCD和CMOS摄像头,一般而言CCD摄像头体积大造价高精度高,而CMOS摄像头由于集成度高造价远低于CCD摄像头,同时CMOS摄像头的体积功耗等参数也相应地优于CCD摄像头。Robo一般用Cmos摄像头
卷帘曝光与全局曝光
通常我们在网上买到的摄像头都是卷帘曝光的摄像头,在日常使用时很难看出这两种摄像头的区别,但是在对速度要求高的领域这两种曝光方式的优劣就很明显了,
> 1、尤其是对于廉价的摄像头卷帘曝光的果冻效应更加明显。
> 2、除了果冻效应外,全局曝光的摄像头在低曝光时间的情况下的颜色饱和度更高
曝光
当我们拍摄能自主发光的物体时,降低曝光时间可以减少环境光的影响。这时通过阈值处理得到二值图就可以进一步处理。

可以明显对比到二者中第二个环境光的影响减少了
Gamma矫正
在上面提到曝光可以减少环境光的影响时候,忽略了一个问题就是我们能看到的中间的数字1的光线,也是环境光的一部分。低曝的时候也很容易让数字彻底看不见如下最左图。

对此一种解决方法是:提高摄像头的Gamma值。
当Gamma提高时图像中亮度较低的区域的亮度会被提高。
实现方法如下:
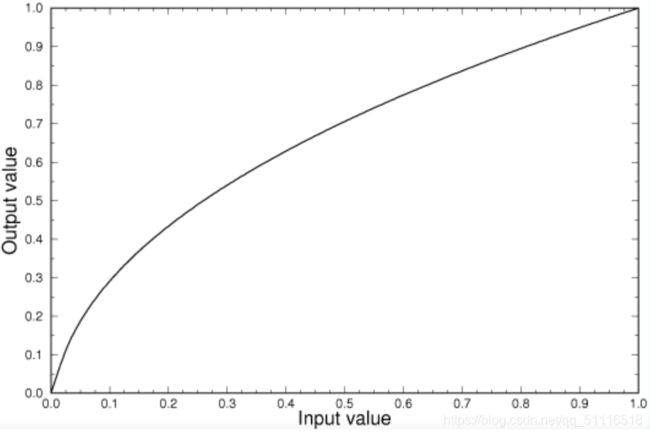
可以简单理解该图:提高Gamma后。像素亮度越低,提高速度越快,像素亮度越高,提高速度越慢。所以提高Gamma后对比度下降。我们就可以看到4了。
与此同时观察到图中被提高亮度后,背景杂光提高后和数字四还是有很大的边缘阈值对比度很明显。只要我们提高对比度到适合程度,然后再选取杂光中最亮的像素值减去原图就可以消去杂光。再提高对比度即可
帧率与摄像头选型
对于RoboMaster比赛而言,识别的速度当然是越快越好,所以摄像头帧率也是越高越好。由于带宽的限制帧率和分辨率通常互相制约,想要高帧率分辨率就会低。
在实战中我们一般用分辨率640*480左右的图片,用彩色卷帘相机
镜头
镜头焦距一般用6mm或8mm左右的镜头比较合适,在这个焦距下3m左右的装甲板拍的很清楚。
Linux摄像头驱动
#pragma execution_character_set("utf-8")
#include 代码来源:https://www.so.com/s?ie=utf-8&src=360se7_addr&q=opencv4%E7%9A%84%E6%91%84%E5%83%8F%E5%A4%B4video.set
本文版权归作者和博客园共有,欢迎转载,但必须给出原文链接,并保留此段声明,否则保留追究法律责任的权利。
参考博客:https://blog.csdn.net/u010750137/article/details/96428059