RANSAC鲁棒估计算法
在VSLAM中,我们假定给出的对应集{x-x'},然后去计算相机的运动估计,但是由于噪声的影响,错误的匹配导致很差的估算效果
采用2种方法减少这个错误匹配影响,选择那些正确的匹配进行估计(RANSAC)和降低那些错误匹配的权重(鲁棒核函数)
两者区别是:
RANSAC方法进行模型估计,实际上分了两步,首先选出局内点,然后再进行一步优化。鲁棒核函数只需要一步,直接优化求解模型参数,通过降低外点的权重,来降低错误数据的影响。
这里只介绍RANSAC随机采样一致算法
这种方法的目的是,从所有数据中选择正确的数据。
基本的概念:
点:每一个数据,SLAM里指的是匹配的点对
野值/外点:错误的点
内点:正确的点
内点集:内点的集合
外点集:外点的集合
模型:带估计的参数
s :估计模型所需要的最小点数
S:所有的点形成的点集
显然,内点集就是我们想要找的正确数据。RANSAC的想法是从点集中随机的选择出 s个点,估计出一个模型,查看剩余点是否符合这个模型。由于是随机选择,一次可能难以找到正确的模型,因此需要多次才可以。
完整的RANSAC方法过程:
目标:
一个模型与含有野值的数据集S的鲁邦拟合。
算法:
(1)随机的从S中选择s个数据点(不一定是一个数据,可能是一对数据)组成一个样本作为模型的一个示例
(2)确定在模型距离阈值t内的数据集S,Si为采样一致性集并定义S的内点集
(3)如果Si的大小(内点的数量)大于某个阈值T,则使用Si的所有点重新估计模型并且结束估计
(4)如果Si的大小(内点的数量)小于某个阈值T,则选择新的子集并且重新上面过程
(5)经过N次试验选择最大的内点集Si,并用Si所有点估计模型
算法三个参数; 距离阈值t,采样数量N, 内点数量阈值T
距离阈值t:
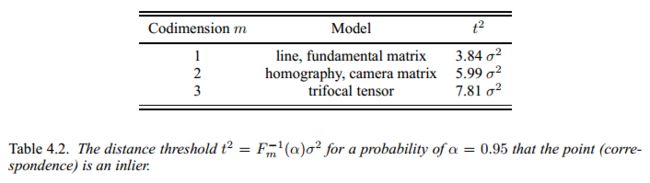
我们希望选择距离阈值t使点成为内点的概率是a,该计算需要知道内点到模型的距离的概率分布,在实际过程中距离阈值通过经验选择,根据模型,每个点可以计算出一个距离的平方 ,利用阈值
,利用阈值 ![]() 就可以识别该点为内点还是外点了。
就可以识别该点为内点还是外点了。![]() 的选择就要根据具体模型去选了,一般直线方程估计中采用点到线的距离的平方,基本矩阵估计中也使用点到极线的距离的平方,单应和相机内参估计中使用点到点的距离的平方。m个独立标准正太分布的平方和服从m自由度的卡方分布,选择阈值 使得点为内点的概率是 。就可以基于下式判断是否为内点
的选择就要根据具体模型去选了,一般直线方程估计中采用点到线的距离的平方,基本矩阵估计中也使用点到极线的距离的平方,单应和相机内参估计中使用点到点的距离的平方。m个独立标准正太分布的平方和服从m自由度的卡方分布,选择阈值 使得点为内点的概率是 。就可以基于下式判断是否为内点

一般取 =0.95,即点成为内点的概率为95%
=0.95,即点成为内点的概率为95%
采样数量N:
多少次合适呢,尝试每个可能的样本计算量是没必要的,也可行,其实只要采样的次数足够多,以保证由s个点组成的随机样本至少有一次没有野值的概率为p,取为0.99. 一个点为内点的概率为 w,为外点的概率为 1-w。可以根据概率计算一下。![]()
![]()
求解出:
分析:
采样次数与内、外点的比例有关系,而与数据的量级无关系。
采样次数随着给最小点数s的增大而增大。
内点数量阈值T:
当我们发现内点的数量足够多的时候就可以提前结束采样。我们一般认为,在给定野值的假定比例后,如果一致集大小接近期望属于该数据集的内点数时迭代就停止。取N个数,![]() 。
。
自适应的决定采样次数
通常实际过程中实际的野值的概率 是不知道的,对此情形,算法从的最坏估计开始,当发现更大的最大一致集时,就把原来的估计更新。
是不知道的,对此情形,算法从的最坏估计开始,当发现更大的最大一致集时,就把原来的估计更新。
确定RANSAC样本方法的自适应算法

直线例子:
namespace MVG {
int LineRANSAC::EstimateLineRansac ( const std::vector< Eigen::Vector2d >& points, const double p, const double sigma, double& A, double& B, double& C, std::vector& is_inlier )
{
// Check input
if(points.size() < 2 )
return -1;
const int n = points.size();
int N = std::numeric_limits::max();
const int T = 0.9*n; // TODO.
int sample_count = 0;
const double t2 = 3.84 * sigma * sigma;
const int s = 2;
cv::RNG rng(cv::getTickCount());
int pre_inlier_cnt = 0;
int final_inlier_cnt = 0;
std::vector tmp_is_inlier(n);
std::fill(tmp_is_inlier.begin(), tmp_is_inlier.end(), false);
is_inlier.reserve(n);
while(sample_count < N){
// Step 1. Select s(2) points and estimate a line.
int idx1 = rng.uniform(0, n);
int idx2 = 0;
while(true)
{
idx2 = rng.uniform(0, n);
if(idx1 != idx2)
{
break;
}
}
const Eigen::Vector2d& p1 = points.at(idx1);
const Eigen::Vector2d& p2 = points.at(idx2);
// Estimate
double tmpA, tmpB, tmpC;
findLine(p1, p2, tmpA, tmpB, tmpC);
// Step 2. Find inlier points.
int inlier_cnt = 0;
for(size_t i = 0; i < points.size(); i++)
{
if(getDistance(points.at(i), tmpA, tmpB, tmpC) < t2)
{
tmp_is_inlier.at(i) = true;
inlier_cnt ++;
}
else
{
tmp_is_inlier.at(i) = false;
}
}
//std::cout << idx1 << " " << idx2 << std::endl;
// Step 3. If we have enough pionts.
if(inlier_cnt > T)
{
is_inlier = tmp_is_inlier;
A = tmpA;
B = tmpB;
C = tmpC;
final_inlier_cnt = inlier_cnt;
// Break and refine the result.
break;
}
// Update N.
if(inlier_cnt > pre_inlier_cnt)
{
pre_inlier_cnt = inlier_cnt;
// recompute N
double w = (double)inlier_cnt / (double)n; // inlier prob./ratio.
N = log(1.0-p) / log(1.0 - std::pow(w, s));
// update the final model.
is_inlier = tmp_is_inlier;
A = tmpA;
B = tmpB;
C = tmpC;
final_inlier_cnt = inlier_cnt;
}
sample_count ++;
}
// TODO Refine the result.
return final_inlier_cnt;
}
void LineRANSAC::findLine ( const Eigen::Vector2d& pt1, const Eigen::Vector2d& pt2, double& A, double& B, double& C )
{
A = pt1[1] - pt2[1];
B = pt2[0] - pt1[0];
C = pt1[0]*pt2[1] - pt2[0]*pt1[1];
}
double LineRANSAC::getDistance ( const Eigen::Vector2d& pt, const double A, const double B, const double C )
{
return std::pow((A*pt[0] + B*pt[1] + C), 2.0) / (A*A + B*B);
}
} // namespace MVG 参考:
1.MVG(计算机多视几何)第二版
2.https://zhuanlan.zhihu.com/p/62175983