GNN,GCN学习整理
GNN
GNN定义
GNN是Graph Neural Network的简称,是用于学习包含大量连接的图的联结主义模型。当信息在图的节点之间传播时GNN会捕捉到图的独立性。与标准神经网络不同的是,GNN会保持一种状态,这个状态可以代表来源于人为指定的深度上的信息。
图神经网络处理的数据就是图,而图是一种非欧几里得数据。GNN的目标是学习到每个节点的邻居的状态嵌入,这个状态嵌入是向量且可以用来产生输出,例如节点的标记。如下图,最终的目的就是学习到红框的H,由于H是定点,因此可以不断迭代直到H的值不再改变即停止。

GNN来源
-
CNN:CNN可以提取大量本地紧密特征并组合为高阶特征,但CNN只能够操作欧几里得数据。CNN的关键在于局部连接、权值共享、多层使用;
-
graph embedding:在低维向量上学习表示图节点、边或者子图。思想源于特征学习和单词嵌入,第一个图嵌入学习方法是DeepWalk,它把节点看做单词并在图上随机游走,并且在它们上面使用SkipGram模型;
基于以上两种思想,GNN会在图结构上聚合信息,因此可以对输入/输出的元素及元素间的独立性进行建模。GNN还可以同时使用RNN核对图上的扩散过程进行建模。
GNN优点
-
标准神经网络(CNN、RNN)无法解决图输入无序性,因为它们将点的特征看做是特定的输入;
-
两点之间的边代表着独立信息,在标准神经网络中,这种信息被看做是点的信息,而GNN可以通过图结构来进行传播,而不是将其看做是特征;通常而言,GNN更新隐藏节点的状态,是通过近邻节点的权值和;
-
高级人工只能需要更高的可解释性;标准神经网络可以生成合成图像或文档,但无法生成图;GNN可以生成无结构的数据(多种应用:文字分类、神经机器翻译、关系提取、图像分类)
GNN缺点
-
更新节点的隐藏状态是低效的;
-
在迭代中使用相同的参数,更新节点隐藏状态是时序的;
-
在边上有一些信息化的特征无法在原始GNN中建模;如何学习边的隐藏状态也是问题;
-
如果我们的目标是节点的表示而不是图,使用固定点H是不合适的
GCN
基础概念
图卷积神经网络(Graph Convolutional Network, GCN)是一类采用图卷积的神经网络,发展到现在已经有基于最简单的图卷积改进的无数版本,在图网络领域的地位正如同卷积操作在图像处理里的地位。
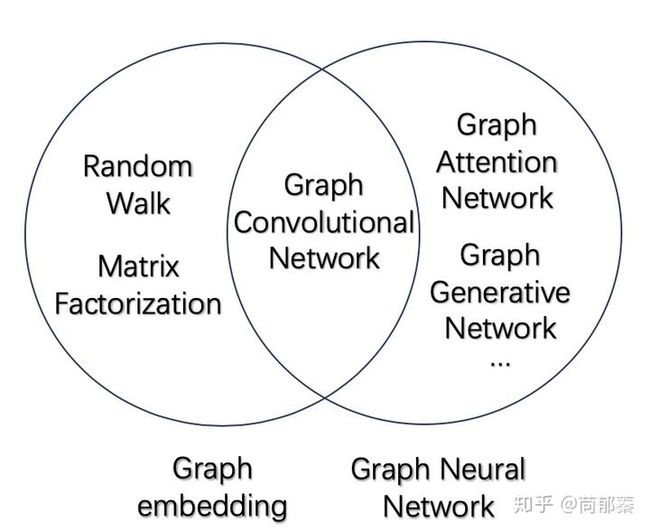
如上图所示,图卷积神经网络GCN属于图神经网络GNN的一类,是采用卷积操作的图神经网络,可以应用于图嵌入GE。
GCN理解
假设有一批图数据,其中有N个节点(node),每个节点都有自己的特征,设这些节点的特征组成一个N×D维的矩阵X,然后各个节点之间的关系也会形成一个N×N维的矩阵A,也称为邻接矩阵(adjacency matrix)。X和A便是我们模型的输入。
GCN也是一个神经网络层,它的层与层之间的传播方式是:

这个公式中:
· A波浪=A+I,I是单位矩阵
· D波浪是A波浪的度矩阵(degree matrix),公式为
· H是每一层的特征,对于输入层的话,H就是X
· σ是非线性激活函数
这个部分,是可以事先算好的,因为D波浪由A计算而来,而A是我们的输入之一。
为了直观理解,使用论文中的一幅图:

上图中的GCN输入一个图,通过若干层GCN每个node的特征从X变成了Z,但是,无论中间有多少层,node之间的连接关系,即A,都是共享的。
假设构造一个两层的GCN,激活函数分别采用ReLU和Softmax,则整体的正向传播的公式为:

最后,针对所有带标签的节点计算cross entropy损失函数:
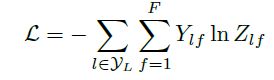
就可以训练一个node classification的模型了。由于即使只有很少的node有标签也能训练,作者称他们的方法为半监督分类。
GCN实战解决“空手道俱乐部问题”
问题概述
空手道俱乐部是一个包含34个成员的社交网络,有成对的文档交互发生在成员之间。俱乐部后来分裂成两个群体,分别以指导员(节点0)和俱乐部主席(节点33)为首,整个网络可视化如下图:
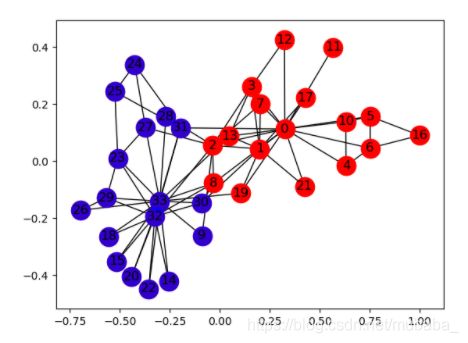
任务是预测每个节点会加入哪一边。
创建club图如下:
import dgl
def build_karate_club_graph():
g = dgl.DGLGraph()
# add 34 nodes into the graph; nodes are labeled from 0~33
g.add_nodes(34)
# all 78 edges as a list of tuples
edge_list = [(1, 0), (2, 0), (2, 1), (3, 0), (3, 1), (3, 2),
(4, 0), (5, 0), (6, 0), (6, 4), (6, 5), (7, 0), (7, 1),
(7, 2), (7, 3), (8, 0), (8, 2), (9, 2), (10, 0), (10, 4),
(10, 5), (11, 0), (12, 0), (12, 3), (13, 0), (13, 1), (13, 2),
(13, 3), (16, 5), (16, 6), (17, 0), (17, 1), (19, 0), (19, 1),
(21, 0), (21, 1), (25, 23), (25, 24), (27, 2), (27, 23),
(27, 24), (28, 2), (29, 23), (29, 26), (30, 1), (30, 8),
(31, 0), (31, 24), (31, 25), (31, 28), (32, 2), (32, 8),
(32, 14), (32, 15), (32, 18), (32, 20), (32, 22), (32, 23),
(32, 29), (32, 30), (32, 31), (33, 8), (33, 9), (33, 13),
(33, 14), (33, 15), (33, 18), (33, 19), (33, 20), (33, 22),
(33, 23), (33, 26), (33, 27), (33, 28), (33, 29), (33, 30),
(33, 31), (33, 32)]
# add edges two lists of nodes: src and dst
src, dst = tuple(zip(*edge_list))
g.add_edges(src, dst)
# edges are directional in DGL; make them bi-directional
g.add_edges(dst, src)
return g
给边和节点赋予特征,使用一个feature张量在第一维上一次性给所有的节点添加特征:
import torch
G.ndata['feat'] = torch.eye(34)
定义一个GCN:
import torch.nn as nn
import torch.nn.functional as F
# 主要定义message方法和reduce方法
# NOTE: 为了易于理解,整个教程忽略了归一化的步骤
def gcn_message(edges):
# 参数:batch of edges
# 得到计算后的batch of edges的信息,这里直接返回边的源节点的feature.
return {'msg' : edges.src['h']}
def gcn_reduce(nodes):
# 参数:batch of nodes.
# 得到计算后batch of nodes的信息,这里返回每个节点mailbox里的msg的和
return {'h' : torch.sum(nodes.mailbox['msg'], dim=1)}
# Define the GCNLayer module
class GCNLayer(nn.Module):
def __init__(self, in_feats, out_feats):
super(GCNLayer, self).__init__()
self.linear = nn.Linear(in_feats, out_feats)
def forward(self, g, inputs):
# g 为图对象; inputs 为节点特征矩阵
# 设置图的节点特征
g.ndata['h'] = inputs
# 触发边的信息传递
g.send(g.edges(), gcn_message)
# 触发节点的聚合函数
g.recv(g.nodes(), gcn_reduce)
# 取得节点向量
h = g.ndata.pop('h')
# 线性变换
return self.linear(h)
再定义一个更深的GCN模型,包含两层 GCN层:
class GCN(nn.Module):
def __int__(self, in_feats, hidden_size, num_classes):
super(GCN, self).__int__()
self.gcn1 = GCNLayer(in_feats, hidden_size)
self.gcn2 = GCNLayer(hidden_size, num_classes)
def forward(self, g, inputs):
h = self.gcn1(g, inputs)
h = torch.relu(h)
h = self.gcn2(g, h)
return h
# 以空手道俱乐部为例
# 第一层将34层的输入转化为隐层为5
# 第二层将隐层转化为最终的分类数2
net = GCN(34,5,2)
使用one-hot向量初始化节点。因为是一个半监督的设定,仅有指导员(节点0)和俱乐部主席(节点33)被分配了label:
inputs = torch.eye(34)
labeled_nodes = torch.tensor([0, 33]) # only the instructor and the president nodes are labeled
labels = torch.tensor([0, 1]) # their labels are different
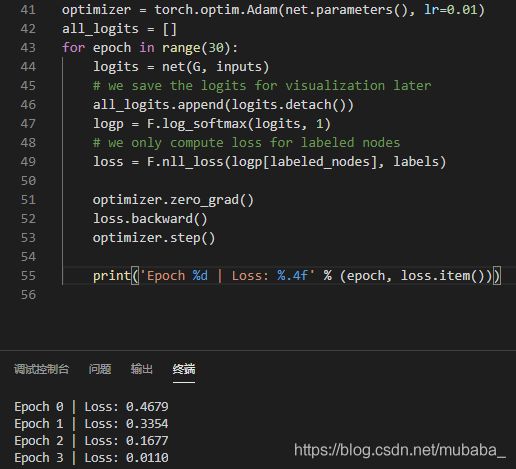
训练:
optimizer = torch.optim.Adam(net.parameters(), lr=0.01)
all_logits = []
for epoch in range(30):
logits = net(G, inputs)
# we save the logits for visualization later
all_logits.append(logits.detach())
logp = F.log_softmax(logits, 1)
# we only compute loss for labeled nodes
loss = F.nll_loss(logp[labeled_nodes], labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print('Epoch %d | Loss: %.4f' % (epoch, loss.item()))
结果: