opencv ORB特征提取与匹配-实现图像拼接
本文基于opencv对两张存在交集的图片进行了拼接,这两张图片拍摄角度不同,并且画面存在一定的交集,该功能可以用代码实现两张图片的拼接。通过设计两张特定的拼接掩膜(mask),来过度拼接处的像素突变,拼接效果很好。
步骤如下:
加载图片
Mat room1 = imread("E:\\opencv_tutorial_data-master\\images\\room1 (2).jpg");
Mat room2 = imread("E:\\opencv_tutorial_data-master\\images\\room2 (2).jpg");
//由于手机拍摄的照片像素过大不方便显示,所以对图片进行resize
resize(room1, room1, Size((int)(room1.cols / 2), (int)(room1.rows / 2)), 0.5, 0.5);
resize(room2, room2, Size((int)(room2.cols / 2), (int)(room2.rows / 2)), 0.5, 0.5);
if (room1.empty() == true || room2.empty() == true) {
cout << "error" << endl;
return -1;
}
imshow("room1", room1);
imshow("room2", room2);
room1

room2
orb特征提取
//创建ORB特征点提取对象,设置提取点数
auto orb = ORB::create(500);
//存放提取的特征点
vector kpts_orb_room1;
vector kpts_orb_room2;
//存放特征点描述子
Mat dec_orb_room1, dec_orb_room2;
//特征点提取和描述子计算
orb->detectAndCompute(room1, Mat(), kpts_orb_room1, dec_orb_room1);
orb->detectAndCompute(room2, Mat(), kpts_orb_room2, dec_orb_room2); 特征点暴力匹配
//创建暴力匹配子对象
auto bf_matcher = BFMatcher::create(NORM_HAMMING, false);
//存放描述子匹配关系
vector matches_bf;
//特征点描述子匹配
bf_matcher->match(dec_orb_room1, dec_orb_room2, matches_bf);
//特征点筛选
float good_rate = 0.025f;//设置筛选率为0.025
int num_good_matchs = matches_bf.size()*good_rate;
std::sort(matches_bf.begin(), matches_bf.end());
matches_bf.erase(matches_bf.begin() + num_good_matchs, matches_bf.end());
//绘制筛选后匹配结果
Mat result_bf;
drawMatches(room1, kpts_orb_room1, room2, kpts_orb_room2, matches_bf, result_bf); 匹配结果
生成掩膜
//获取全景图的大小
int mix_high = max(room1.rows,room2.rows);
int mix_widht = room1.cols + room2.cols;
Mat mix_room_01 = Mat::zeros(Size(mix_widht, mix_high),CV_8UC3);
Rect roi;
roi.x = 0;
roi.y = 0;
roi.width = room1.cols;
roi.height = room1.rows;
//获取room2与room1的对齐图像
room1.copyTo(mix_room_01(roi));
imshow("mix_room_01", mix_room_01);
Mat mix_room_02;
warpPerspective(room2, mix_room_02, h,Size(mix_widht, mix_high));
imshow("mix_room2", mix_room_02);
//计算重合区域mask
Mat mask = Mat::zeros(Size(mix_widht, mix_high),CV_8UC1);
generate_mask(mix_room_02,mask);
imshow("mask",mask);
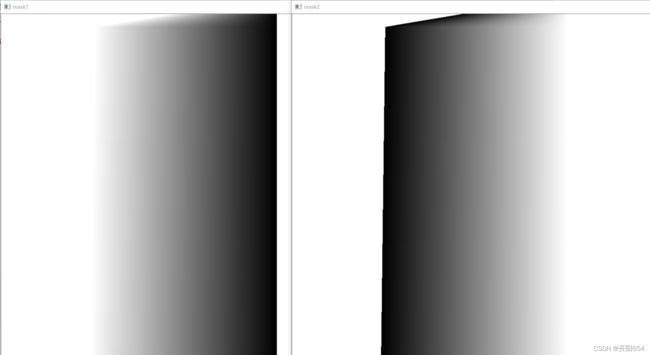
//创建遮罩层并根据mask完成权重初始化
Mat mask1= Mat::ones(Size(mix_widht, mix_high), CV_32FC1);
Mat mask2= Mat::ones(Size(mix_widht, mix_high), CV_32FC1);
//room1 mask1
linesapce(mask1,1,0,room1.cols,mask);
imshow("mask1", mask1);
//room2 mask2
linesapce(mask2, 0, 1, room2.cols, mask);
imshow("mask2", mask2);
void generate_mask(Mat&img, Mat&mask) {
int w = img.cols;
int h = img.rows;
for (int row = 0; row < h;row++) {
for (int col = 0; col < w; col++) {
Vec3b p = img.at(row,col);
int b = p[0];
int g = p[1];
int r = p[2];
if (b == g && g == r && r == 0) {
mask.at(row, col) = 255;
}
}
}
}
void linesapce(Mat&image, float begin, float finish, int w1, Mat&mask) {
int offstx = 0;
float interval = 0;
float delta = 0;
for (int i = 0; i < image.rows; i++) {
offstx = 0;
interval = 0;
delta = 0;
for (int j = 0; j < image.cols; j++) {
int pv = mask.at(i, j);
if (pv == 0 && offstx == 0) {
offstx = j;
delta = w1 - offstx;
interval = (finish-begin) / (delta - 1);
image.at(i, j) = begin + (j - offstx)*interval;
}
else if(pv==0&&offstx>0&&(j-offstx)(i, j) = begin + (j - offstx)*interval;
}
}
}
} 
融合
//左侧融合
Mat m1;
vector mv;
mv.push_back(mask1);
mv.push_back(mask1);
mv.push_back(mask1);
merge(mv,m1);
mix_room_01.convertTo(mix_room_01,CV_32F);
multiply(mix_room_01,m1, mix_room_01);
//右侧融合
Mat m2;
mv.clear();
mv.push_back(mask2);
mv.push_back(mask2);
mv.push_back(mask2);
merge(mv, m2);
mix_room_02.convertTo(mix_room_02, CV_32F);
multiply(mix_room_02, m2, mix_room_02);
//合并
Mat mix_room;
add(mix_room_01, mix_room_02, mix_room);
mix_room.convertTo(mix_room,CV_8U);
imshow("mix_room", mix_room);
imshow("result_bf", result_bf);
waitKey(0);
return 0; 最终效果!!!
完整代码
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace xfeatures2d;
void linesapce(Mat&image,float begin,float finish,int w1,Mat&mask);
void generate_mask(Mat&img,Mat&mask);
int main()
{
Mat room1 = imread("E:\\opencv_tutorial_data-master\\images\\room1 (2).jpg");
Mat room2 = imread("E:\\opencv_tutorial_data-master\\images\\room2 (2).jpg");
resize(room1, room1, Size((int)(room1.cols / 2), (int)(room1.rows / 2)), 0.5, 0.5);
resize(room2, room2, Size((int)(room2.cols / 2), (int)(room2.rows / 2)), 0.5, 0.5);
if (room1.empty() == true || room2.empty() == true) {
cout << "error" << endl;
return -1;
}
imshow("room1", room1);
imshow("room2", room2);
//创建ORB特征点提取对象,设置提取点数
auto orb = ORB::create(500);
//存放提取的特征点
vector kpts_orb_room1;
vector kpts_orb_room2;
//存放特征点描述子
Mat dec_orb_room1, dec_orb_room2;
//特征点提取和描述子计算
orb->detectAndCompute(room1, Mat(), kpts_orb_room1, dec_orb_room1);
orb->detectAndCompute(room2, Mat(), kpts_orb_room2, dec_orb_room2);
/*---------FLANN 匹配-------------*/
/*
if ((dec_orb_book.type() != CV_32F) && (dec_orb_book_in_scene.type() != CV_32F)) {
dec_orb_book.convertTo(dec_orb_book, CV_32F);
dec_orb_book_in_scene.convertTo(dec_orb_book_in_scene, CV_32F);
}
auto flann_matcher = FlannBasedMatcher::create();
vector matches_flann;
flann_matcher->match(dec_orb_book, dec_orb_book_in_scene, matches_flann);
Mat result_flann;
drawMatches(book, kpts_orb_book, book_in_scene, kpts_orb_book_in_scene, matches_flann, result_flann);
imshow("result_flann", result_flann);
*/
/*--------------------------------*/
/*---------暴力 匹配-------------*/
//创建暴力匹配子对象
auto bf_matcher = BFMatcher::create(NORM_HAMMING, false);
//存放描述子匹配关系
vector matches_bf;
//特征点描述子匹配
bf_matcher->match(dec_orb_room1, dec_orb_room2, matches_bf);
//特征点筛选
float good_rate = 0.025f;
int num_good_matchs = matches_bf.size()*good_rate;
std::sort(matches_bf.begin(), matches_bf.end());
matches_bf.erase(matches_bf.begin() + num_good_matchs, matches_bf.end());
//绘制筛选后匹配结果
Mat result_bf;
drawMatches(room1, kpts_orb_room1, room2, kpts_orb_room2, matches_bf, result_bf);
//获取两张图的特征点
vectorroom1_points;
vectorroom2_points;
for (size_t t = 0; t < matches_bf.size(); t++) {
room1_points.push_back(kpts_orb_room1[matches_bf[t].queryIdx].pt);
room2_points.push_back(kpts_orb_room2[matches_bf[t].trainIdx].pt);
}
//根据对应的特征点获取从demo->scene的变换矩阵
Mat h = findHomography(room2_points, room1_points, RANSAC);
//获取全景图的大小
int mix_high = max(room1.rows,room2.rows);
int mix_widht = room1.cols + room2.cols;
Mat mix_room_01 = Mat::zeros(Size(mix_widht, mix_high),CV_8UC3);
Rect roi;
roi.x = 0;
roi.y = 0;
roi.width = room1.cols;
roi.height = room1.rows;
//获取room2与room1的对齐图像
room1.copyTo(mix_room_01(roi));
imshow("mix_room_01", mix_room_01);
Mat mix_room_02;
warpPerspective(room2, mix_room_02, h,Size(mix_widht, mix_high));
imshow("mix_room2", mix_room_02);
//计算重合区域mask
Mat mask = Mat::zeros(Size(mix_widht, mix_high),CV_8UC1);
generate_mask(mix_room_02,mask);
imshow("mask",mask);
//创建遮罩层并根据mask完成权重初始化
Mat mask1= Mat::ones(Size(mix_widht, mix_high), CV_32FC1);
Mat mask2= Mat::ones(Size(mix_widht, mix_high), CV_32FC1);
//room1 mask1
linesapce(mask1,1,0,room1.cols,mask);
imshow("mask1", mask1);
//room2 mask2
linesapce(mask2, 0, 1, room2.cols, mask);
imshow("mask2", mask2);
//左侧融合
Mat m1;
vector mv;
mv.push_back(mask1);
mv.push_back(mask1);
mv.push_back(mask1);
merge(mv,m1);
mix_room_01.convertTo(mix_room_01,CV_32F);
multiply(mix_room_01,m1, mix_room_01);
//右侧融合
Mat m2;
mv.clear();
mv.push_back(mask2);
mv.push_back(mask2);
mv.push_back(mask2);
merge(mv, m2);
mix_room_02.convertTo(mix_room_02, CV_32F);
multiply(mix_room_02, m2, mix_room_02);
//合并
Mat mix_room;
add(mix_room_01, mix_room_02, mix_room);
mix_room.convertTo(mix_room,CV_8U);
imshow("mix_room", mix_room);
imshow("result_bf", result_bf);
waitKey(0);
return 0;
}
void generate_mask(Mat&img, Mat&mask) {
int w = img.cols;
int h = img.rows;
for (int row = 0; row < h;row++) {
for (int col = 0; col < w; col++) {
Vec3b p = img.at(row,col);
int b = p[0];
int g = p[1];
int r = p[2];
if (b == g && g == r && r == 0) {
mask.at(row, col) = 255;
}
}
}
}
void linesapce(Mat&image, float begin, float finish, int w1, Mat&mask) {
int offstx = 0;
float interval = 0;
float delta = 0;
for (int i = 0; i < image.rows; i++) {
offstx = 0;
interval = 0;
delta = 0;
for (int j = 0; j < image.cols; j++) {
int pv = mask.at(i, j);
if (pv == 0 && offstx == 0) {
offstx = j;
delta = w1 - offstx;
interval = (finish-begin) / (delta - 1);
image.at(i, j) = begin + (j - offstx)*interval;
}
else if(pv==0&&offstx>0&&(j-offstx)(i, j) = begin + (j - offstx)*interval;
}
}
}
} 参考资料:
腾讯课堂贾志刚老师课程
《opencv4入门到精通》