学习笔记-动手学深度学习-线性回归
3.1. 线性回归
回归(regression)是能为一个或多个自变量与因变量之间关系建模的一类方法。 在自然科学和社会科学领域,回归经常用来表示输入和输出之间的关系。在机器学习领域中的大多数任务通常都与预测(prediction)有关。
3.1.1. 线性回归的基本元素
线性模型
矩阵向量表示为: 
线性回归的目标是找到一组权重向量w和偏置b: 当给定从X的同分布中取样的新样本特征时, 这组权重向量和偏置能够使得新样本预测标签的误差尽可能小。
损失函数
损失函数(loss function)能够量化目标的实际值与预测值之间的差距。 通常我们会选择非负数作为损失,且数值越小表示损失越小,完美预测时的损失为0。 回归问题中最常用的损失函数是平方误差函数。 当样本i的预测值为y^(i),其相应的真实标签为y(i)时, 平方误差可以定义为以下公式:
我们需计算在训练集n个样本上的损失均值

在训练模型时,我们希望寻找一组参数(w∗,b∗), 这组参数能最小化在所有训练样本上的总损失。如下式:
随机梯度下降
算法的步骤如下: (1)初始化模型参数的值,如随机初始化; (2)从数据集中随机抽取小批量样本且在负梯度的方向上更新参数,并不断迭代这一步骤。 对于平方损失和仿射变换,我们可以明确地写成如下形式:

用模型进行预测
给定“已学习”的线性回归模型![]() , 现在我们可以通过房屋面积x1和房龄x2来估计一个(未包含在训练数据中的)新房屋价格。 给定特征估计目标的过程通常称为预测(prediction)或推断(inference)。
, 现在我们可以通过房屋面积x1和房龄x2来估计一个(未包含在训练数据中的)新房屋价格。 给定特征估计目标的过程通常称为预测(prediction)或推断(inference)。
3.1.2. 矢量化加速
在训练我们的模型时,我们经常希望能够同时处理整个小批量的样本。 为了实现这一点,需要我们对计算进行矢量化, 从而利用线性代数库,而不是在Python中编写开销高昂的for循环。
%matplotlib inline
import math
import time
import numpy as np
import torch
from d2l import torch as d2l为了说明矢量化为什么如此重要,我们考虑对向量相加的两种方法。 我们实例化两个全为1的10000维向量。 在一种方法中,我们将使用Python的for循环遍历向量; 在另一种方法中,我们将依赖对+的调用。
n = 10000
a = torch.ones(n)
b = torch.ones(n)定义一个计时器:
class Timer: #@save
"""记录多次运行时间"""
def __init__(self):
self.times = []
self.start()
def start(self):
"""启动计时器"""
self.tik = time.time()
def stop(self):
"""停止计时器并将时间记录在列表中"""
self.times.append(time.time() - self.tik)
return self.times[-1]
def avg(self):
"""返回平均时间"""
return sum(self.times) / len(self.times)
def sum(self):
"""返回时间总和"""
return sum(self.times)
def cumsum(self):
"""返回累计时间"""
return np.array(self.times).cumsum().tolist()首先,我们使用for循环,每次执行一位的加法。
c = torch.zeros(n)
timer = Timer()
for i in range(n):
c[i] = a[i] + b[i]
f'{timer.stop():.5f} sec'![]()
或者,我们使用重载的+运算符来计算按元素的和。
timer.start()
d = a + b
f'{timer.stop():.5f} sec'![]()
结果很明显,第二种方法比第一种方法快得多。 矢量化代码通常会带来数量级的加速。 另外,我们将更多的数学运算放到库中,而无须自己编写那么多的计算,从而减少了出错的可能性。
3.1.3. 正态分布与平方损失
接下来,我们通过对噪声分布的假设来解读平方损失目标函数。
正态分布和线性回归之间的关系很密切。 正态分布(normal distribution),也称为高斯分布(Gaussian distribution), 最早由德国数学家高斯(Gauss)应用于天文学研究。 简单的说,若随机变量x具有均值μ和方差σ2(标准差σ),其正态分布概率密度函数如下:

下面我们定义一个Python函数来计算正态分布。
def normal(x, mu, sigma):
p = 1 / math.sqrt(2 * math.pi * sigma**2)
return p * np.exp(-0.5 / sigma**2 * (x - mu)**2)我们现在可视化正态分布。
# 再次使用numpy进行可视化
x = np.arange(-7, 7, 0.01)
# 均值和标准差对
params = [(0, 1), (0, 2), (3, 1)]
d2l.plot(x, [normal(x, mu, sigma) for mu, sigma in params], xlabel='x',
ylabel='p(x)', figsize=(4.5, 2.5),
legend=[f'mean {mu}, std {sigma}' for mu, sigma in params])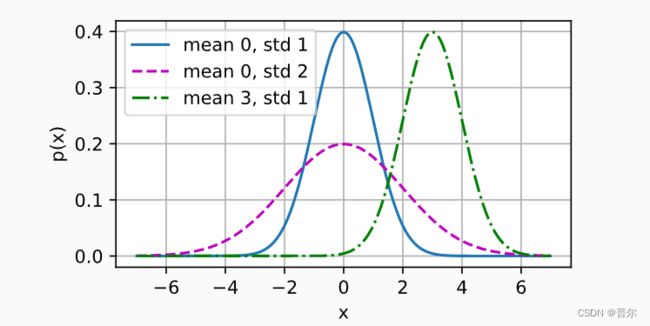
就像我们所看到的,改变均值会产生沿x轴的偏移,增加方差将会分散分布、降低其峰值。均方误差损失函数(简称均方损失)可以用于线性回归的一个原因是: 我们假设了观测中包含噪声,其中噪声服从正态分布。 噪声正态分布如下式:

其中,ϵ∼N(0,σ )。
)。
因此,我们现在可以写出通过给定的x观测到特定y的似然(likelihood):

现在,根据极大似然估计法,参数w和b的最优值是使整个数据集的似然最大的值:
根据极大似然估计法选择的估计量称为极大似然估计量。 虽然使许多指数函数的乘积最大化看起来很困难, 但是我们可以在不改变目标的前提下,通过最大化似然对数来简化。 由于历史原因,优化通常是说最小化而不是最大化。 我们可以改为最小化负对数似然−logP(y∣X)。 由此可以得到的数学公式是:
现在我们只需要假设σ是某个固定常数就可以忽略第一项, 因为第一项不依赖于w和b。 现在第二项除了常数1σ2外,其余部分和前面介绍的均方误差是一样的。 幸运的是,上面式子的解并不依赖于σ。 因此,在高斯噪声的假设下,最小化均方误差等价于对线性模型的极大似然估计。