详细介绍如何在ROS 中使用自定义 msg 消息
首先我们对Ros中的msg 消息做以简单的回顾:
msg 消息是 ROS topic 通讯时,节点之间进行传递的内容。msg 消息描述的是业务之间传递数据,也可以理解为业务之间数据的抽象化。
常见 Msg 消息:
std消息:std 消息是属于基本数据类型的消息。和 Python 类似,描述的是数字、字符串、布尔等类型。geometry消息:描述的是空间相关数据。sensor消息:描述的是传感器相关消息。
下面我们通过一个例子进行msg消息的深入理解:
如果我们现在有两个节点,一个节点是 Publisher,另外一个节点是 Subscriber。Publisher 发布的消息是员工相关数据,其中包含了员工的姓名和年龄。需要编写程序实现这两个节点,然后模拟数据的发布和订阅。
| 字段名 | 字段类型 | 字段描述 |
| name | string | 员工姓名 |
| age | int16 | 员工年龄 |
这时就需要我们自己定义消息格式,在自定义的消息格式中,需要包含 name 和 age。通常在编程语言中,我们是要去确定消息字段中的类型。例如 Python 中表达数据类型是这样的。
name = ''
age = 11敲黑板啦!!!在自定义 msg 消息时,需要把 Python的类型修改成对应的 msg 类型,详细对应关系如下:
| msg类型 | C++对应类型 | Python对应类型 |
| bool | uint8_t | bool |
| int8 | int8_t | int |
| int16 | int16_t | int |
| int32 | int32_t | int |
| int64 | int64_t | int, long |
| uint8 | uint8_t | int |
| uint16 | uint16_t | int |
| uint32 | uint32_t | int |
| uint64 | uint64_t | int, long |
| float32 | float | float |
| float64 | float | float |
| string | std:string | str, bytes |
| time | ros:Time | rospy.Time |
| duration | ros::Duration | rospy.Duration |
下面我们就进入实操环节,开始动手自定义一个msg消息:
在Ros中,当没有现成的消息类型来描述要传递的消息时,我们会自定义消息。通常会新建一个Package去自定义消息,这个Package一般不去写任何的业务逻辑,只是用来声明自定义的消息类型,可以只定义一种或多种消息类型,根据业务需求来定。
首先初始化一个工作空间:
mkdir -p kk
cd ~/kk
mkdir -p ws
cd ~/kk/ws
mkdir -p src
# 对工作空间进行编译
catkin_make
1.创建package
package取名也是有讲究的,一般为: 业务名_msgs,比如std_msg、gps_msgs。因为是发送员工的信息,我们取包名为staff_msgs。
cd ~/kk/ws/src
catkin_create_pkg staff_msgs roscpp rospy rosmsg
mkdir /home/kk/ws/src/staff_msgs/scripts
cd ~/kk/ws/src/staff_msgs
mkdir scripts

2.创建msg 目录
在package包下新建一个msg文件夹。
mkdir msg
cd ~/kk/ws/src/staff_msgs/msg
touch staff.msg![]()
3.创建msg文件
在msg文件夹下创建.msg文件。msg文件就是自定义消息文件,用来描述消息格式。这里我们创建staff.msg文件,内容如下:
string name
int64 age这个自定义消息包包含两种数据形式: name和 age,neme的类型是string,age的类型是int64。
一般msg文件遵循一定的规范:每一行表示一种数据。前面是类型,后面是名称。
4.在staff_msgs/package.xml文件中添加配置。
message_generation
message_runtime - build_depend:编译时依赖。
- message_generation:消息自动生成,目的就是把我们编写的msg文件自动转为python文件。
- exec_depend:执行时依赖。
- message_runtime:把自定义的消息加载进来。

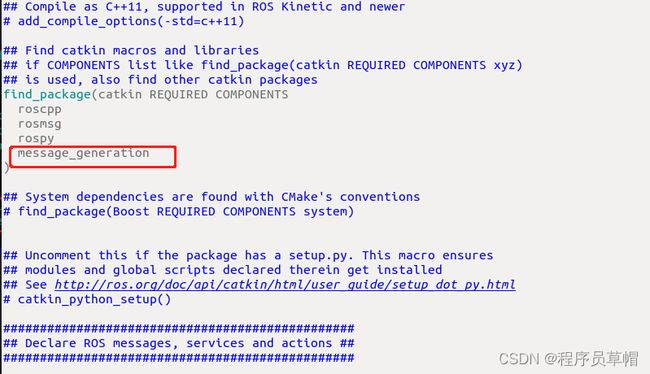
5.配置staff_msgs/CMakeLists.txt文件。
在find_package中添加message_generation依赖:
find_package(
...
message_generation
) 添加add_message_files,这里的staff.msg要和你创建的msg文件名称一致,且必须放在msg目录下:
添加add_message_files,这里的staff.msg要和你创建的msg文件名称一致,且必须放在msg目录下:
add_message_files(
FILES
staff.msg
)
generate_messages配置:
generate_messages(
DEPENDENCIES
std_msgs
)
修改 catkin_package:为 catkin编译提供了依赖 message_runtime:
catkin_package(
...message_runtime
)
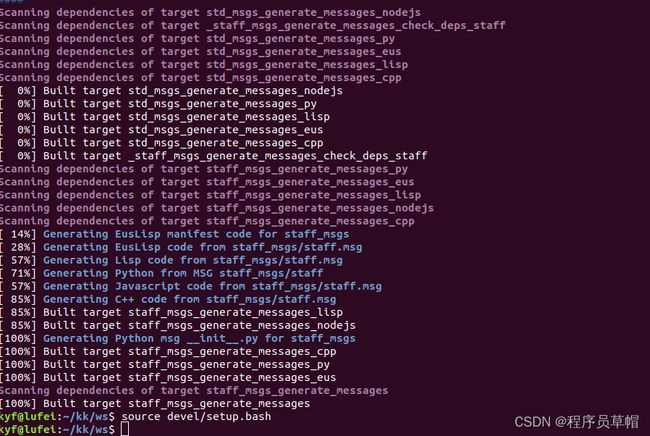
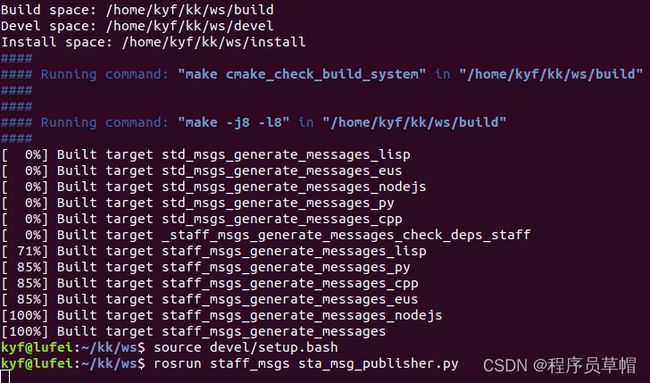
编译项目:
cd /~/kk/ws
catkin_make
source devel/setup.bash
 命令校验,可以看到我们刚才定义的消息:
命令校验,可以看到我们刚才定义的消息:
rosmsg show staff_msgs/staff 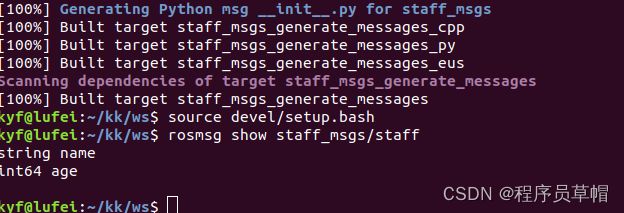
devel 文件夹校验:
进入 /home/kyf/kk/ws/devel/lib/python2.7/dist-packages 目录下,查看是否生成和 package名称staff_msgs相同的目录,以及目录内是否生成对应的py文件。

编写程序对自定义msg消息进行发布和订阅
1.编写publisher程序
在staff_msgs/scripts 目录下新建一个 sta_msg_publisher.py 文件,并赋予该文件可执行权限:
sudo chmod +x ~/kk/ws/src/staff_msgs/scripts/sta_msg_publisher.py ![]()
(图片中stu_msg_publisher.py名称有误,有改文件名)
导入刚才自定义的消息类型,通过发布者把自定义的 staff 消息发布出去。
#! /usr/bin/env python
# coding: utf-8
import rospy
from staff_msgs.msg import staff
if __name__ == '__main__':
# 创建 node
node_name = "stu_publisher"
rospy.init_node(node_name)
# 创建 publisher
topic_name = "/my_sta"
publisher = rospy.Publisher(topic_name, staff, queue_size=1000)
rate = rospy.Rate(2)
index = 0
while not rospy.is_shutdown():
msg = staff()
msg.name = 'staff{}'.format(index)
msg.age = index
# 通过 publisher 广播数据
publisher.publish(msg)
index += 1
rate.sleep()
2.创建 stu_msg_subscriber.py 文件
在staff_msgs/scripts 目录下新建一个 sta_msg_subscriber.py 文件。并赋予该文件可执行权限:
sudo chmod +x ~/kk/ws/src/staff_msgs/scripts/sta_msg_subscriber.py导入刚才自定义的消息类型,通过订阅者去接收自定义的 staff 消息。 注意 topic_name要和发布者的保持一致。
#! /usr/bin/env python
# coding: utf-8
import rospy
from staff_msgs.msg import staff
def topic_callback(msg):
if not isinstance(msg, staff):
return
print msg.age
print msg.name
if __name__ == '__main__':
# 创建 node
node_name = "stu_subscriber"
rospy.init_node(node_name)
# 创建 subscriber
topic_name = "/my_sta"
rospy.Subscriber(topic_name, staff, callback=topic_callback)
# 阻塞
rospy.spin()
3.调试
# 新开一个终端,启动 ROS Master
roscore
# 切换到工作空间目录下
cd ~/kk/ws
# 使用 catkin_make 编译项目
catkin_make
# source 开发环境 && 运行编译
source devel/setup.bash
rosrun staff_msgs sta_msg_publisher.py
# 新开一个终端, source 开发环境 && 运行编译
source devel/setup.bash
rosrun staff_msgs sta_msg_subscriber.py


程序运行后则在订阅窗口可以打印出发布的员工消息。



至此 msg 自定义消息的创建和使用就可以说基本掌握了。
草帽专门将自己的源码上传以供大家参考学习,有需要的童鞋可以点击链接下载!!!
https://download.csdn.net/download/Yifancoder/85170251 https://download.csdn.net/download/Yifancoder/85170251
https://download.csdn.net/download/Yifancoder/85170251 