ROS学习(22)TF变换
文章目录
- 前言
- 一、TF功能包
- 二、TF工具
-
- 1、tf_monitor
- 2、tf_echo
- 3、static_transform_publisher
- 4、view_frames
- 三、乌龟例程中的TF
- 四、乌龟跟随例程代码实现
-
- 1、创建TF广播器
- 2、创建TF监听器
- 3、实现乌龟跟随运动
前言
机器人本地和机器人的工作环境中存在大量的组件元素,在机器人设计和应用中都会涉及不同组件的位置和姿态,这就需要引入坐标系以及坐标变换的概念。
坐标变换是机器人系统中常用的基础功能,ROS中的坐标变换系统由TF功能包维护。
一、TF功能包
TF是一个让用户随时间跟踪多个坐标系的功能包,使用树形数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系,帮助开发者在任意时间、在坐标系间完成点、向量等坐标的变换。
TF可以在分布式系统中进行操作,一个机器人系统中所有的坐标变换关系,对于所有的节点组件都是可用的,所有订阅TF消息的节点都会缓冲一份所有坐标系的变换关系数据,所以这种结构不需要中心服务器来存储任何数据。
想要使用TF功能包,总体来说需要两步:
- 监听TF变换
接收并缓存系统中发布的所有坐标变换数据,并从中查询所需要的坐标变换关系。 - 广播TF变换
向系统中广播坐标系之间的坐标变换关系。系统中可能会存在多个不同部分的TF变换广播,每个广播都可以直接将坐标系变换关系插入TF树中,不需要再进行同步。
二、TF工具
坐标系统涉及多个空间之间的变换,不容易进行抽象,所以TF提供了丰富的终端工具来帮助开发者调试和创建TF变换。
1、tf_monitor
1)用于打印TF树中所有坐标系的发布状态
rosrun tf tf_monitor
2)查看指定坐标系之间的发布状态
rosrun tf tf_monitor <source_frame> <target_frame>
2、tf_echo
用于查看指定坐标系之间的变换关系
rosrun tf tf_echo <source_frame> <target_frame>
3、static_transform_publisher
用于发布两个坐标系之间的静态坐标变换,这两个坐标系不发生相对位置变化。该工具需要设置坐标的偏移参数和旋转参数,发布频率以ms为单位。
命令有两种格式,如下:
1)旋转参数使用以弧度为单位的yaw/pitch/roll角度
rosrun tf static_transform_publisher x y x yaw pitch roll frame_id child_frame_id period_in_ms
2)旋转参数使用四元数
rosrun tf static_transform_publisher x y x qx qy qw frame_id child_frame_id period_in_ms
该命令还可以在launch文件中使用,如下:
<launch>
<node pkg="tf" type="static_transform_publisher" name="link_broadcaster" args="1 0 0 0 0 0 1 link_parent link 100" />
<launch>
4、view_frames
view_frames是可视化的调试工具,可以生成pdf文件,显示TF树的信息。命令如下:
rosrun tf view_frames
查看pdf文件,可以使用如下命令:
evince frames.pdf
三、乌龟例程中的TF
主要用于理解TF的作用,并且熟悉上述TF工具的使用,功能包名为turtle_tf,功能包安装命令如下:
sudo apt-get install ros-kinetic-turtle-tf
运行turtle_tf功能包,命令如下:
roslaunch turtle_tf turtle_tf_demo.launch
打开键盘控制节点,命令如下:
rosrun turtlesim turtle_teleop_key
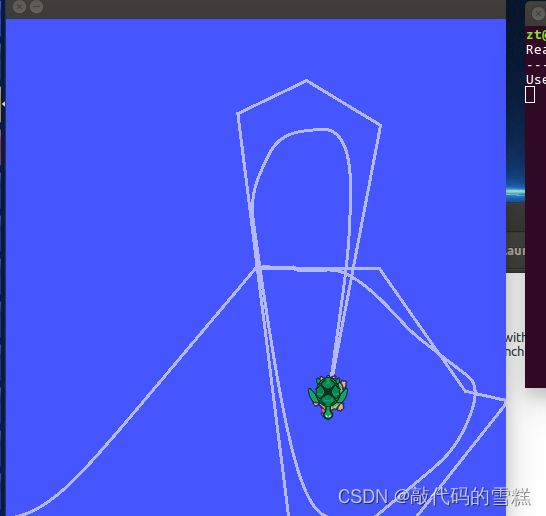
效果如下:
可以发现,出现了两只乌龟,使用键盘方向键控制一只乌龟移动,会发现另一只乌龟会跟随移动。
其TF树如下:
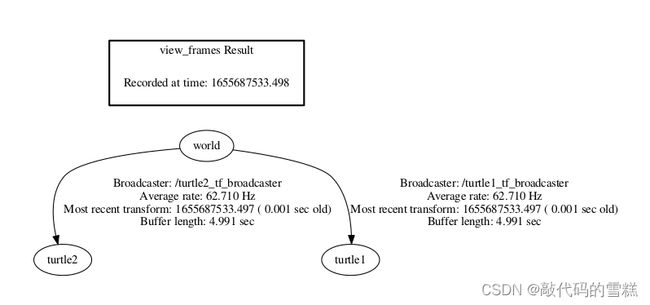
如上所示,当前系统中存在三个坐标系,时间坐标系world、乌龟坐标系turtle1和乌龟坐标系turtle2。
世界坐标系是该系统的基础坐标系,其它坐标系都相对该坐标系建立,所以world是TF树的根节点,而两只乌龟坐标系的原点就是乌龟在世界坐标系下的坐标位置。
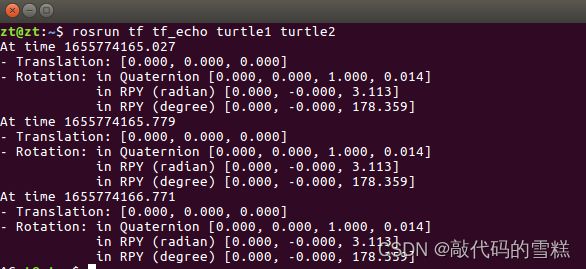
可以通过如下命令,查看两只乌龟坐标系之间的变换关系:
rosrun tf tf_monitor turtle1 turtle2
效果如下:
四、乌龟跟随例程代码实现
现在要让turtle2跟随turtle1运动,等价于turtle2坐标系向turtle1坐标系移动,首先新建learning_tf功能包。
1、创建TF广播器
创建一个节点,主要用于发布乌龟坐标系与世界坐标系之间TF变换,turtle_tf_broadcaster.cpp内容如下:
#include 2、创建TF监听器
创建一个节点,主要用于监听TF消息,从中获取turtle2相对于turtle1的坐标系的变换,从而控制turtle2的移动。turtle_tf_listener.cpp内容如下:
#include 3、实现乌龟跟随运动
编写start_demo_with_listener.launch文件,内容如下:
<launch>
<!-- 海龟仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海龟的tf广播 -->
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf广播,并且控制turtle2移动 -->
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
运行如下命令:
roslaunch learning_tf start_demo_with_listener.launch
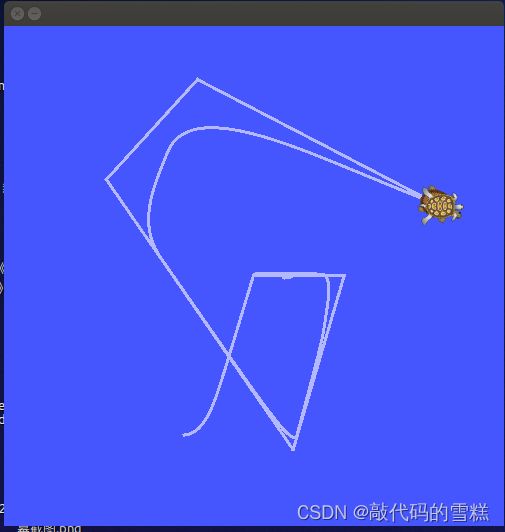
效果如下:
打开键盘控制节点,命令如下:
rosrun turtlesim turtle_teleop_key
跟随效果如下: