ROS 学习笔记(9)—— 参数的使用与编程方法
参数的使用与编程方法
- 1、模型
- 2、编程实现
-
- 步骤一:创建新的功能包
- 步骤二:编写 cpp 代码
- 步骤三:配置 CMakeLists.txt 的编译规则
- 步骤四:编译并运行
- 3、可能遇到的问题
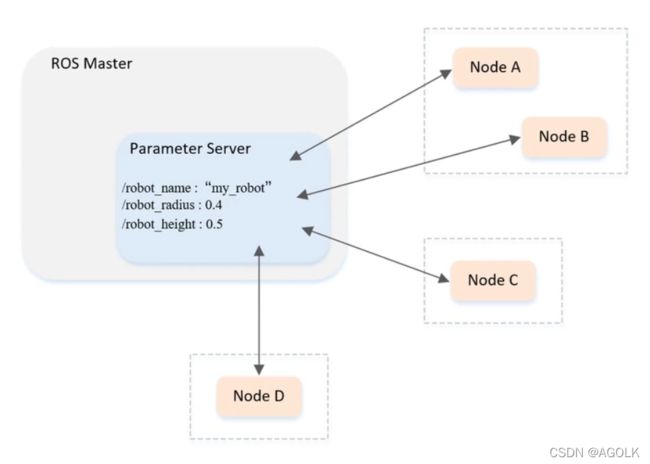
1、模型
2、编程实现
步骤一:创建新的功能包
回到/catkin_ws/src文件夹下,创建一个新的功能包,名为learning_parameter:
catkin_create_pkg learning_parameter roscpp rospy std_srvs
步骤二:编写 cpp 代码
在/catkin_ws/src/learning_parameter/src/目录下新建parameter_config.cpp文件,把以下代码复制进去:
/**
* 该例程设置/读取海龟例程中的参数
*/
#include 步骤三:配置 CMakeLists.txt 的编译规则
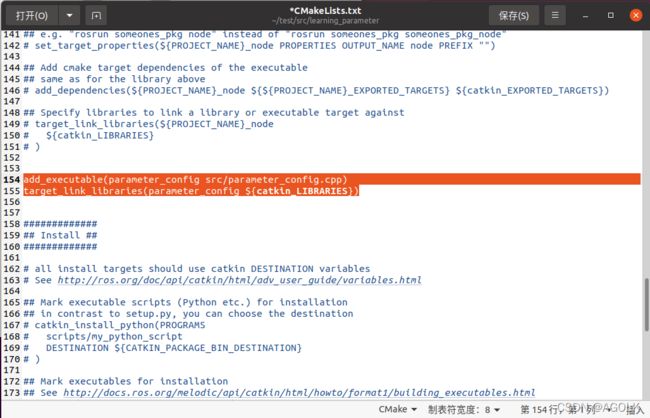
与之前一样,需要配置 CMakeLists.txt 的编译规则:
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})
步骤四:编译并运行
在catkin_ws文件夹下,输入catkin_make命令进行编译,在/catkin_ws/devel/lib/learning_parameter目录下可以看到parameter_config文件,说明编译成功。
依次输入以下指令运行:
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn
看到以下效果证明已经成功:

3、可能遇到的问题
如果命令行中有[ INFO]字样返回,但是海龟仿真器背景颜色没有变色,问题可能出在:C++代码中的参数名字与海龟仿真器的参数名字不一致。
解决方法:需要先重启 roscore 和海龟仿真器,使用rosparam list命令查看海龟仿真器的参数(命令的具体解释请查看我的另一篇文章《ROS常用命令》),然后把C++代码中所有"/turtlesim/background_x"(x=r,g,b)都改为对应的RGB参数。修改完后,重新编译运行即可。