概率图模型
文章目录
-
- 9.1 有向图模型:贝叶斯网络
- 9.2 无向图模型:马尔科夫随机场
- 9.3 学习与推断
- 9.5 实例模型
9.1 有向图模型:贝叶斯网络
图结构:有向无环图(DAG)
结点:一个或一组随机变量
边:随机变量之间的单向、直接影响

 条件独立性:D-分离准则:判断贝叶斯网络结点之间的条件独立性
条件独立性:D-分离准则:判断贝叶斯网络结点之间的条件独立性
 贝叶斯网络的全局马尔可夫性:给定结点集合A,B,C,若A到B中结点的所有无向路径都是被C阻塞的,则称A和B是被C D-分离的,即A和B关于C条件独立。
贝叶斯网络的全局马尔可夫性:给定结点集合A,B,C,若A到B中结点的所有无向路径都是被C阻塞的,则称A和B是被C D-分离的,即A和B关于C条件独立。
阻塞的:若一条无向路径包含结点x满足以下条件之一,则称其是阻塞的:
(1)x是tail-to-tail或head-to-tail结点,并且x包含在C中
(2)x是head-to-head结点,并且x(及其x的任意后代均)不包含在C中
贝叶斯网络的局部马尔可夫性:
(1)给定某变量的父结点,则该变量条件独立于所有其他非其后代结点
(2)给定某变量的马尔可夫毯(父结点、子结点、子结点的父结点),则改变了条件独立于其他变量
9.2 无向图模型:马尔科夫随机场
图结构:无向图
结点:一个或一组随机变量
边:随机变量之间的相互依赖(非“因果关系”)
团:对于图中的结点子集,若其中任意两个结点之间都有连边,则称该节点子集为一个团
极大团:若在团中加入其他任意一个结点都不再形成团,则称该团为极大团
 马尔可夫随机场的全局马尔可夫性:给定结点集合A,B,C,若从A中的结点到B中结点必须经过C中的结点,则称A和B被C分离,即A和B关于C条件独立
马尔可夫随机场的全局马尔可夫性:给定结点集合A,B,C,若从A中的结点到B中结点必须经过C中的结点,则称A和B被C分离,即A和B关于C条件独立
局部马尔可夫性:给定某变量的马尔可夫毯(邻接变量),则该变量条件独立于其他变量
成对马尔可夫性:给定其他所有变量,两个非相邻变量条件独立
9.3 学习与推断
推断:已知联合概率分布 P ( x 1 , x 2 , . . . , x n ) P(x_{1},x_{2},...,x_{n}) P(x1,x2,...,xn),估计 P ( x Q ∣ x E ) P(x_{Q}|x_{E}) P(xQ∣xE),其中 x Q ∩ x E = ϕ x_{Q}\cap x_{E}=\phi xQ∩xE=ϕ, x Q ∪ x E x_{Q}\cup x_{E} xQ∪xE是集合 { x 1 , x 2 , . . . , x n } \{x_{1},x_{2},...,x_{n} \} {x1,x2,...,xn}的子集, x Q x_{Q} xQ是问题变量, x E x_{E} xE是证据变量。
P ( x Q ∣ x E ) = P ( x Q , x E ) P ( x E ) = P ( x Q , x E ) ∑ x Q P ( x Q , x E ) P(x_{Q}|x_{E})=\frac{P(x_{Q},x_{E})}{P(x_{E})}=\frac{P(x_{Q},x_{E})}{\sum_{x_{Q}}P(x_{Q},x_{E})} P(xQ∣xE)=P(xE)P(xQ,xE)=∑xQP(xQ,xE)P(xQ,xE)
核心问题: ∑ x Q P ( x Q , x E ) \sum_{x_{Q}}P(x_{Q},x_{E}) ∑xQP(xQ,xE)
枚举:假设 x Q x_{Q} xQ有k个变量,每个变量的取值个数的期望是r,则时间复杂度为 r k r^{k} rk
推断的核心问题:如何高效地计算边际分布 P ( x E ) = ∑ x Q P ( x Q , x E ) P(x_{E})=\sum_{x_{Q}}P(x_{Q},x_{E}) P(xE)=∑xQP(xQ,xE)
推断方法:
-
精确推断:计算 P ( x E ) P(x_{E}) P(xE)或 P ( x Q ∣ x E ) P(x_{Q}|x_{E}) P(xQ∣xE)的精确值
- 计算复杂度随着极大团规模的增长呈指数级增长,适用范围有限
- (1)变量消去
- 利用图模型的紧凑概率分布形式来削减计算量
- 优点:简单直观,代数上的消去对应图中结点的消去
- 缺点:针对不同的证据变量会造成大量的冗余计算
- (2)信念传播
- 将变量消去过程中产生的中间结果视为可复用的消息,避免重复计算
-
近似推断:在较低的时间复杂度下获得原问题的近似解
-
通过采样一组服从特定分布的样本,来近似原始分布,适用范围更广,操作性更强
-
(1)前向采样
- 依据贝叶斯网络(条件)概率直接采样
- 缺点:
- 对小概率事件采样困难,可能经过很多次采样也无法获得足够多的样本
- 仅适用于贝叶斯网络,不适用于马尔可夫随机场
-
(2)吉布斯采样
- 直接依照条件概率 P ( x Q ∣ x E ) P(x_{Q}|x_{E}) P(xQ∣xE)采样
- 优点:
- 直接从 P ( x Q ∣ x E ) P(x_{Q}|x_{E}) P(xQ∣xE)采样,解决小概率事件采样难的问题
- 同时适用于贝叶斯网络和马尔可夫随机场
- 简单易推导,时间复杂度低
-
学习:从观测数据 x ( 1 ) , x ( 2 ) , . . . , x ( m ) x^{(1)},x^{(2)},...,x^{(m)} x(1),x(2),...,x(m)中学习联合概率分布 P ( x 1 , x 2 , . . . , x n ) P(x_{1},x_{2},...,x_{n}) P(x1,x2,...,xn),寻找最符合观测数据的概率图模型
9.4 近似推断
9.5 实例模型
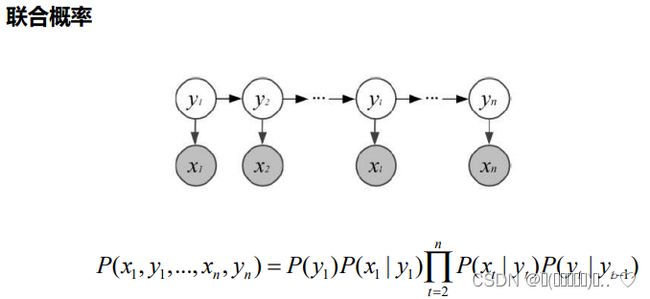
隐马尔可夫模型HMM
定义:隐马尔科夫模型是关于时序的概率模型,是最简单的动态贝叶斯网络模型
状态变量 { y 1 , y 2 , . . . , y n } , y t ϵ Y \{y_{1},y_{2},...,y_{n} \}, y_{t}\epsilon Y {y1,y2,...,yn},ytϵY表示第t时刻的系统状态
观测变量 { x 1 , x 2 , . . . , x n } , x t ϵ X \{x_{1},x_{2},...,x_{n} \}, x_{t}\epsilon X {x1,x2,...,xn},xtϵX表示第t时刻的观测值
观测变量仅依赖于当前时刻的状态变量,当前状态仅依赖于前一时刻的状态
状态集合 Y = { s 1 , s 2 , . . . , s N } Y=\{s_{1},s_{2},...,s_{N} \} Y={s1,s2,...,sN},观测值集合 X = { o 1 , o 2 , . . . , o M } X=\{o_{1},o_{2},...,o_{M} \} X={o1,o2,...,oM}


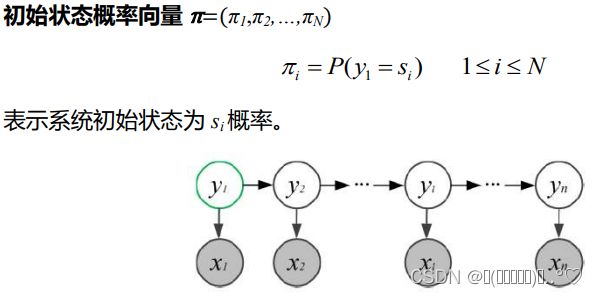
隐马尔可夫模型由A,B, π \pi π唯一确定,三者称为隐马尔可夫模型的三要素
生成过程:给定A,B, π \pi π,生成观测序列 { x 1 , x 2 , . . . , x n } \{x_{1},x_{2},...,x_{n} \} {x1,x2,...,xn}
(1)设置t=1,并根据初始状态概率 π \pi π生成初始状态 y 1 y_{1} y1
(2)根据 y t y_{t} yt和观测概率矩阵B生成 x t x_{t} xt
(3)根据 y t y_{t} yt和状态转移矩阵A生成 y t + 1 y_{t+1} yt+1
(4)若t 三个基本问题: (1)概率计算问题:给定模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测序列 x = { x 1 , x 2 , . . . , x n } x=\{x_{1},x_{2},...,x_{n} \} x={x1,x2,...,xn},计算在模型 λ \lambda λ下观测到x的概率 P ( x ∣ λ ) P(x|\lambda) P(x∣λ)(评估模型与观测序列之间的匹配程度) (2)预测问题:给定模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测序列 x = { x 1 , . . . , x n } x=\{x_{1},...,x_{n} \} x={x1,...,xn},求使得条件概率 P ( y ∣ x , λ ) P(y|x,\lambda) P(y∣x,λ)最大的观测序列 y = { y 1 , . . . , y n } y=\{y_{1},...,y_{n} \} y={y1,...,yn}(根据观测序列推测状态序列) (3)学习问题:给定观测序列 x = { x 1 , . . . , x n } x=\{x_{1},...,x_{n} \} x={x1,...,xn},调整模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)参数,使得该系列出现的概率 P ( x ∣ λ ) P(x|\lambda) P(x∣λ)最大(训练模型使其更好地描述观测序列) 条件随机场CRF 定义:条件随机场是给定随机变量x的条件下,随机变量y的马尔可夫随机场。G(V,E)是y中的随机变量构成的无向图,图中每个变量在给定条件x条件下都满足马尔可夫性