毫米波雷达的硬件架构与射频前端
说明
本篇博文梳理(车载)毫米波雷达的系统构成,特别地,对其射频前端各部件做细节性的原理说明。本篇博文会基于对这方面知识理解的加深以及读者的反馈长期更新内容和所附资料,有不当之处或有其它有益的参考资料可以在评论区给出,我们一起维护,我会定期完善。
Blog:
20221008博文第一次写作。
文章架构
目录
说明
文章架构
一、雷达原理与系统概述
二、射频前端构成与理解
2.1 本振(波形产生器)
2.2 倍频器
2.3 功分器
2.4 移相器
2.5 PA
2.6 小结:发射机的主要评价指标
2.7 LNA
2.8 混频器
2.9 滤波器
2.10 接收机的增益控制
2.11 小结:接收机的评价指标
三、总结
四、参考资料
一、雷达原理与系统概述
雷达是一种电磁传感器,用来对反射性物体检测和定位(当然,现阶段的雷达其功能已经发展到实现包括成像、目标识别/分类等应用层面了,跟踪可以归结到前面的检测和定位中),雷达工作基本原理(过程)为:
1、雷达通过天线辐射电磁能量,使其在空中传播。
2、部分辐射的能量被离雷达某个距离上的反射体截获。
3、目标截获的能量重新辐射到许多方向上。
4、一部分重新辐射的能量返回至雷达天线,并被雷达天线接收。
5、在被接收机放大和合适的信号处理后,在接收机的输出端做出目标回波信号是否存在的判决,此时目标的位置和其它有关目标的信息就可以得到了。
由此,雷达的系统构成可以概括如下:

雷达的系统构成 图片来源:《现代雷系统分析与设计》1.2节
要明白的是:雷达发射信号和接收信号的幅度之间是有巨大差别的!这个差别可以通过雷达方程量化:
式中,Pr为接收功率,Pt为发射功率,Gt、Gr分别对应发射与接收天线增益,σs为目标RCS,λ为波长,R对应目标离雷达的距离。一个典型的车载雷达其接收天线接收功率与距离的关系趋势图如下所示:

仿真中,发射功率为12dBm,收发天线增益为10dBi,关于雷达方程在系统设计中的应用细节我会在另外的博文中给出,本篇博文专注雷达的射频器件的介绍。
本篇博文涉及的射频前端限于:发射部分 + 接收部分(到ADC前),ADC往后的部分是信号和数据处理的工作了(比如使用DSP等做数据的处理)。于是,对应到前面雷达的系统构成图中,本博文涉及到的硬件包括:波形产生器、发射机(其中可能包括的倍频器、功分器、PA、移相器等)、接收机(其中包括的LNA、混频器、滤波器、增益控制部分等),另外还有对双工器的介绍。
二、射频前端构成与理解
需要说明的是,现阶段这些全部的射频前端器件都在往集成化的方向靠:把全部的东西都做到一颗芯片里头,在车载毫米波雷达领域,业内上游的芯片厂家包括NXP、Ti、国内的加特兰等他们产品都是如此,SOC可以极大程度地减小尺寸、功耗、成本、系统也得到简化,鲁棒性更强。不过值得提及的是:NXP的产品方案基本都是收发器与处理器分开的(比如其最新款的TEF82xx收发芯片和S32R45处理器)。而Ti、加特兰等多数厂家将数据处理部分和前端收发部分集中到了一颗芯片内部。这两种方案的优劣这里暂且不表。
完整的系统框图如下(以Ti IWR1642为例):

Ti IWR1642系统框图
2.1 本振(波形产生器)
车载77GHz毫米波雷达的本振基本都是从19-20GHz通过4倍频(或者X2再X2)上去的,本振的实现方式很多,现阶段大多采用的是基于锁相环(PLL)的方案?PLL的具体原理可以参看别的资料,比如:锁相环(PLL)基本原理 | 亚德诺半导体 (analog.com),更具体地,PLL从外部拿到晶振的低频输入(一般是比如50MHz的无源晶振给的信号,会经过一些内部的整形操作再做为PLL的输入),在PLL中调节包括起止频率和chirp斜率等参数,该调频连续波信号最终由VCO输出给到后端的倍频器(一般从VCO出来的这个20GHz的LO信号功率大概在-6dBm左右)。
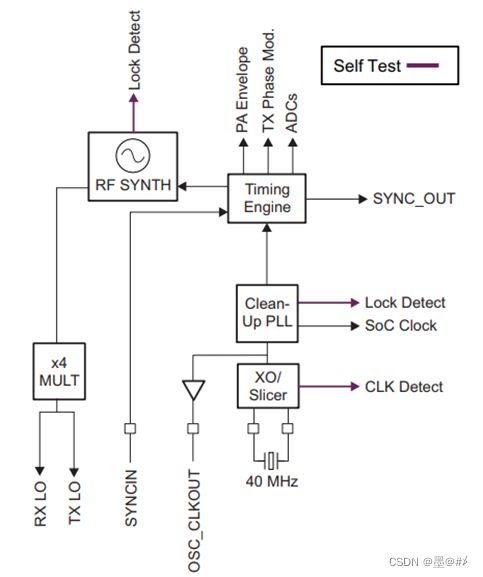
本振源信号流向 (来源IWR1642 datasheet)
40MHz晶振----Clean Up PLL----RF SYNTH----X4MULT
2.2 倍频器
倍频器的实现不在本博文的讨论范围之内,倍频器_百度百科 (baidu.com),倍频器将前述本振频率整数倍(具体为4倍)地提高,倍频器可以使前述主振荡器在较低频率工作,可以提高其频率稳定度。
2.3 功分器
功分器将前述倍频上来的信号分成多路输出(具体看有多少个发射通道),比如IWR1642的是分成了两路。一个功分器的输出端口之间应保证一定的隔离度,此外,功分器每一分路都会有衰减,所以我们需要在其后增加PA来放大信号。功分器的具体实现不在本博文的介绍范围功率分配器_百度百科 (baidu.com)。功分器一般是可逆的:也可以反过来讲多路信号能量合成一路,此时称为合路器。
2.4 移相器
移相器顾名思义就是改变发射信号的相位,这样做的目的可以用来做包括:控制波束指向(比如相控阵雷达相控阵雷达_百度百科 (baidu.com))、通过改变相位以抗干扰(具体可见我写的另一篇博文:车载毫米波雷达信号处理中的干扰问题_墨@#≯的博客-CSDN博客)、在MIMO中天线同时发射时通过改变发射相位以方便后端的通道分离(比如BPMA、DDMA等,具体可见我写的另一篇博文:车载毫米波雷达MIMO阵列的天线发射问题_墨@#≯的博客-CSDN博客),主要是前述三点作用吧。
移相器的实现不在本博文的讨论范围之内,现阶段商用芯片能实现的主要是:0/180°的相移或6bits控制的5.625°的相位步进(比如Ti的2243和1843)。
2.5 PA
功率放大器(Power Amplifier), 射频放大器_百度百科 (baidu.com), 为了保证足够的射频功率,在最末端需要使用功放将功率提高再馈给天线,一般芯片手册中介绍的芯片发射功率就是指从PA出来的功率值,雷达产品的一个比较重要的标准叫功率平坦度,便是对PA的一个比较严格的指标要求。PA的具体实现不在本博文的讨论范围之内,各现有车载毫米波雷达产品的功率输出大都在12dBm左右。
2.6 小结:发射机的主要评价指标
前述各部分共同构成了发射机,发射机为雷达提供了一个载波受到调制的大功率射频信号,经馈线和收发开关由天线辐射出去。根据雷达的用途不同,需对发射机提出一些具体的技术要求和性能指标:发射机的具体组成和对各部分的要求都应该从这些性能指标出发进行考虑。
A、工作频率或频段:对于车载毫米波雷达而言是76GHz-81GHz。
B、输出功率:如前所述,取决于功放PA出来的功率,CMOS工艺下现阶段的商用车载毫米波雷达芯片的输出功率大多是12dBm左右,或16mw左右,这是现阶段CMOS工艺下极限了?
C、总效率:是指发射机的输出功率和它的输入总功率之比(在5%与30%的样子?),发射机通常在整机中式最耗电和需要冷却的部分,总效率越高,可以省电以及减轻整机体积和重量。
D、信号形式(调制方式):现阶段车载毫米波雷达主要还是用的FMCW,此外了解也出现了数字雷达用的是PMCW的脉冲体制。
E、信号稳定度和频谱纯度:车载毫米波雷达业内标准对发射信号射频一致性的要求包括:频率调频线性度和功率平坦度(车载毫米波雷达的性能标准与测试方法_墨@#≯的博客-CSDN博客),此两者主要是对VCO与PA提出要求。更一般地,这里的信号稳定度是从时域的角度考虑发射信号:包括其振幅、频率(相位)、脉冲宽度等参数是否随时间发生变化,信号的参数不稳定可分为有规律的和随机的两类:有规律的主要来源于电源滤波不良,随机的则由各类噪声(电路噪声比如热噪等是无法避免的)产生。频谱纯度则是从频域的角度考虑这些问题(体现为在设计的发射频带外出现的离散和随机分布的频谱)。
这里理清楚几个概念:
频谱纯度与相位噪声:对于前述的离散分量,定义为离散分量的单边带功率与信号功率之比,以dB计;对于分布型的噪声定义偏离载频![]() (Hz)的每单位频带的单边带功率与信号功率之比,以dB/Hz计:假设测量带宽为∆B,则频谱纯度为:
(Hz)的每单位频带的单边带功率与信号功率之比,以dB/Hz计:假设测量带宽为∆B,则频谱纯度为:
![]() (dB/Hz)
(dB/Hz)
通常把偏离载频![]() (Hz),在1Hz带宽内的一个相位调制边带的功率
(Hz),在1Hz带宽内的一个相位调制边带的功率![]() 与载波功率
与载波功率![]() 之比成为单边带相位噪声,简称相位噪声,即:
之比成为单边带相位噪声,简称相位噪声,即:
![]() (dBc/Hz)
(dBc/Hz)
商用车载毫米波雷达芯片一般都有针对分布噪声(相位噪声)的参数说明,该值大多略低于-90dBc/Hz@1MHz,而针对离散分量,比如脉冲多普勒雷达其典型的要求是低于-80dB。
F、此外,对发射机的要求还包括结构、使用等(这涉及到体积、重量、散热、检查维修等,因为用于车载雷达的发射机都集中在一颗芯片上了这更多的是芯片设计者需要考虑的问题),发射机作为整个雷达系统最昂贵的部分,还需要考虑成本等问题。
以下介绍接收部分
2.7 LNA
低噪放(Low-noise amplifier) 低噪放_百度百科 (baidu.com)是最先一级的接收前端,用于直接对接收天线的接收信号进行放大,最为最前端的放大器LNA的指标对整个接收机的性能影响很大,LNA的评价指标包括:噪声系数(LNA的噪声系数一般在1-3dB?)、增益(单级的一半在10-20dB?)、驻波比、线性度等。LNA的具体实现不在本博文讨论范围,具体的指标我会在后文着重介绍整个接收机的指标要求。LNA需要明白的是其作为最前端的放大器,起的是对接收到的所有信号做无差别放大的作用。
2.8 混频器
混频器就是一个乘法器,混频器_百度百科 (baidu.com)用于从LNA下来的接收到的射频信号与本振信号进行混频,并将结果输出给到后端的低通滤波器。两信号混频后由积化和差的三角函数公式,会得到两信号的频率之和的信号与频率之差的信号,在后端的低通滤波器中将高频成分滤除,得到中频信号。
这里需要注意的是,现阶段商用的车载毫米波雷达芯片有两种接收的方案:单路或者IQ两路,IQ两路的实现需要增加一路接收通道,如下图所示:

IQ两路接收通道及采样(IWR1642)
将用于混频的本振信号反相后再混频,Ti第一代的芯片基本都是IQ两路的方案,但是其新出的AWR2944是单路,如下图所示:

单路接收与采样(AWR2944)
IQ两路其优点在于对ADC的采样率要求低(如果两路采样那么采样率可以等于带宽值,但是单路的需要为两倍才行),在后端的信号处理过程中不需要丢除多余的数据(对于单路的,做完距离向FFT后我们需要丢掉一半的无用数据)。但是单路的设计更简单也更有成本优势(少了一路)。加特兰的芯片也是单路的。
2.9 滤波器
接收从混频器出来的信号做低通滤波处理,该低通的阈值就是芯片的中频带宽值,Ti的IWR1642是5MHz,AWR2944是15MHz。此外,还有高通滤波的操作:为了滤除直流信号以及1/f噪声等极低频的信号,高通频率在十几KHz到一两百百KHz之间,因为需要考虑雷达探测的近距目标其中频频率很低,雷达探测的目标距离与中频频率有公式:![]() ,,slop为chirp斜率,R为目标距离,f为该距离下对应的中频频率,该高通滤波器的下限不能设置得很高,否则直接也将近距目标滤除了。
,,slop为chirp斜率,R为目标距离,f为该距离下对应的中频频率,该高通滤波器的下限不能设置得很高,否则直接也将近距目标滤除了。
2.10 接收机的增益控制
增益控制部分处在滤波器后,adc正式采样之前。这部分内容蛮有意思,涉及的东西也有很多,可以分成两个部分来讨论:
2.10.1 为什么需要增益控制
接收机的一个核心指标是动态范围(会在后面的内容中更具体地给出),所谓的动态范围是指接收机正常工作时所容许的输入信号的强度范围:信号太弱不能检测出来;信号太强则会发生饱和(超过了放大器的输入范围)。这些强信号可能来自近处的RCS较大的目标,特别是地物杂波等的干扰,而弱信号则可能来自需要探测的远处RCS较小的目标,雷达应该尽可能地把这些目标都探测到,为了不至于让远处目标丢失、近处的目标使雷达饱和,为提高雷达的动态范围,于是需要用到增益控制。
2.10.2 增益控制的具体实现方式与原理
这里给出两种类型,更具体的电路上的实现原理不在本博文的讨论范围之内,后文将给出在实际的雷达芯片中用例。
1、自动增益控制(Automatic Gain Control, AGC)
自动增益控制自动增益控制_百度百科 (baidu.com)采用了负反馈技术,根据信号的幅度(功率)自动调整接收机的增益,信号幅度大时增益小,信号幅度小时,增益增加,以使雷达始终保持适当的增益范围。 还有一个瞬时自动增益控制,原理差不多。
2、近程增益控制或灵敏度时间控制(sensitivity time control, STC)
用以防止近程杂波所引起的放大器过载,其基本原理为:发射机每次发射信号后,接收机产生一个与杂波功率随时间变化规律(随着时间的延长,杂波功率应该是逐渐减弱的)相匹配的控制电压Ec,控制接收机的增益按此规律变化(时间越长增益越大)。近程增益控制电路实际上是一个使接收机灵敏度随时间而变化的控制电路。
增益控制在实际雷达芯片中的使用:
加特兰的一个解决方案是:在每帧正常的chirp发射之前,先发射3个chirp,芯片内部会基于这三个chirp的回波信号(信号幅度等信息),通过一些方法得到在该帧下适合各级放大器的放大系数。
2.11 小结:接收机的评价指标
前述各个部分构成了接收机,接收机的任务是将天线上接收到的微弱高频信号从伴随的噪声和干扰中提取出来,经过放大、混频、滤波、中放、采样等过程送至后端的信号处理模块。雷达接收机的主要性能指标如下:
A、噪声系数:噪声系数定义为接收机的输入信噪比与输出信噪比的比值。接收机内部包括馈线、放大器、混频器等都会产生噪声,这些噪声会恶化信号的SNR,噪声系数其物理意义就是评价接收机内部噪声对信号的影响。现有的车载毫米波雷达芯片中,该值一般在12dB左右。
B、灵敏度:表示接收机所能接收微弱信号的能力,能接收的信号越微弱则接收机的灵敏度越高,(对应雷达的作用距离也就越远)。以雷达可以检测的最小信号功率Smin来评价,有公式:
![]()
式中,K为玻尔兹曼常数,T0取室温290K,B为噪声带宽(或者说是接收机带宽,采样带宽?中频带宽),Fn为噪声系数,SNRmin是在后端的信号处理过程中能检测到信号时的最小SNR,该值在车载雷达的系统参数论证中我们一般取12dB左右,此外,雷达灵敏度的下限一般在-174dBm(不能达到,车载毫米波雷达该值一般在-120 --- -115dBm之间)。
C、工作频带宽度:对于车载毫米波雷达该值应超过76GHz-81GHz。
D、动态范围:指接收机正常工作时所容许的输入信号的强度范围,其最小可检测信号功率对应为前述灵敏度Smin,接收机开始出现饱和时的输入功率Smax与该Smin之比为接收机的动态范围:
![]()
现在一些4D毫米波雷达的动态范围说是能做到100dB?
E、中频的选择和滤波特性:现阶段商用的车载毫米波雷达芯片其中频带宽一般在5MHz-20MHz;滤波特性在于尽量使得滤波带宽等于信号带宽。
F、工作稳定度和频率稳定度:应使得接收尽可能受环境的影响小,频率稳定度类似前述发射机部分的信号稳定度和频谱纯度。
G、抗干扰能力:关于车载毫米波雷达的抗干扰能力可以参考之前的博文:车载毫米波雷达信号处理中的干扰问题_墨@#≯的博客-CSDN博客。
补充说明:增加一个双工器的介绍
双工器的存在主要是为了使收发公用一个天线,可以减小尺寸,(成本)?双工器按照工作类型可分为时分双工和频分双工,时分双工是指发射和接收在时间上分开,这很好理解;频分双工是指当发射信号的频率和接收信号的频率有一定的偏移时,此时收发可同时进行(比如手机与基站的上行频段和下载频段时不一样的,所以收发可以同时工作,我们在说话时能同时听到对方讲话)。
双工器的实现主要基于滤波器,双工器处在天线和收发通道之间,通过设置滤波器使得发射信号不会泄露到接收通道中(否则一下子饱和了),同时接收信号不会泄露到发射信号上(即便接收信号极小,且对发射的影响也极小..)
遗憾的是:FMCW体制下的应用于车载的毫米波雷达前两种情况都没法实现(我们需要实时探测且收发的信号是几乎一致的只是有时延),没法使用双工器,这里拿出来说的原因暂且不表。
三、总结
本篇博文介绍了(车载)毫米波雷达的SOC系统架构、梳理了射频前端各构成部分及其原理、给出了发射机与接收机部分的评价指标。
本篇博文旨在理清楚车载毫米波雷达的系统架构,特别是射频前端的各组成部分及其功能,以期帮助入门的系统工程师在做参数设计时可以明白各参数设计背后的原理。更多的实现细节以及更后端的数据处理部分我后面会尝试后续增加相关的内容。
四、参考资料
《现代雷达系统分析与设计》
《雷达手册(第三版 上)》
AWR2944 单芯片 76GHz 和 81GHz FMCW 雷达传感器 datasheet (ti.com.cn)
IWR1642 单芯片 76 至 81GHz 毫米波传感器 datasheet (Rev. B) (ti.com.cn)