读书笔记 | 自动驾驶中的雷达信号处理(第9章 汽车雷达的应用概述)
本文编辑:调皮哥的小助理
大家好,我是调皮哥,又和大家见面了,时间过得很快,到目前为止,本次读书笔记的内容是最后一篇了,相信大家通过之前文章的阅读,已经对自动驾驶中的雷达信号处理、雷达数据处理、人工智能算法有了大致的了解,那么本期文章就带领大家总结一下汽车雷达的应用,从而整体把握汽车雷达。
下期预告
后面调皮哥将对《MIMO RADAR SIGNAL PROCESSING》一书进行整理,无论是军用雷达还是民用雷达,无论是车载还是智能消费类,MIMO雷达都是非常重要的技术,目前的雷达大多数都在采用MIMO技术来提高性能,因此对MIMO的研究非常有必要,敬请期待!
9.1介绍
9.1.1关键应用项目背景
本文利用雷达作为传感器,给出了当前和未来的一些重要的汽车应用。在汽车应用中,需要处理的信号可以通过超声传感器(Sonar)、雷达传感器(radar)、相机(CV)、激光雷达(Lidar)、GPS和其他发动机控制单元传感器来获得。
音频、图像和阵列处理技术可以应用于获取的信号,以提取信息,用于自动控制车辆动态或提醒司机车辆周围即将发生的危险。虽然有多种技术应用于汽车,但应用雷达信号处理的汽车安全应用将是本文的重点。
安全性正迅速成为汽车性能指标的一个非常重要的组成部分,安全可以是被动的,如安全带,也可以是主动的,如自动紧急制动。我们最关心的是主动安全,因为它直接关系到未来的驾驶技术,比如使用雷达传感技术的无人驾驶或自动驾驶,本节的大部分内容将涉及自动驾驶相关的应用。
可以预见,未来自动驾驶系统将利用雷达、相机和光学传感器作为主动安全系统的关键部件。虽然相机和光学传感器可以作为传感器融合方法的一部分,但雷达比这些技术有独特的优势,其优点包括能够同时探测距离和速度,能够在白天和晚上探测物体,能够在下雨和下雪的情况下进行无意操作,以及能够安装在前保险杠筋膜后面,从而保持车辆的美观完整。此外,更少的小型传感器,毫米级精度的距离探测与雷达传感器可能用于远程和近程应用。
在大多数汽车应用中,其主要思想是感知即将到来的危险,并警告或帮助司机减轻危险的情况,就车辆而言,应用可大致分为短程和远程两类:
(1)在近程类,有盲点检测、后视传感器的后方交叉交通检测和切入警告、前方交叉交通、行人/自行车检测,以及侧面碰撞警告的前方和侧面传感器。在这些应用中,传感器通过使用单个或一组传感器来获取来自物体的反射信号。通过信号处理手段,可以估计出被检测物体的距离、速度和角度。这些信息可以用来确定被检测到的物体是否会在车辆行驶的道路上构成危险。
在发生危险时,自动规避系统被激活,如果驾驶员没有反应,可以采取措施减少危险的影响。在一种驾驶辅助应用程序中,如行人检测,可以通过警告司机车辆路径上的行人来避免死亡。因此,信号处理在运动目标信息提取中起着关键作用。通常,短程雷达的覆盖范围可达30米,速度可达150公里/小时。它们的特点是具有大于 ± 4 0 ∘ \pm 40^{\circ} ±40∘ 的宽视场(FOV)和高达 5 G H z 5 \mathrm{GHz} 5GHz 的高距离分辨率的大带宽。
(2)在远程应用中,自动巡航控制(ACC)、前向碰撞警告和行人碰撞警告是必不可少的。预计从2020年起,大多数市场的新车车型将能够可靠地检测行人。与近程雷达传感器相比,远程雷达通常覆盖距离可达250米,速度可达250公里/小时。其特点是视场宽度小于 ± 1 0 ∘ \pm 10^{\circ} ±10∘ ,信号带宽小于 1 G H z 1 G H z 1GHz 。
注意:由于视场较窄,远程雷达无法探测到距离雷达测量中心较近的物体!
9.1.2 主要参与者和贡献者
汽车工业正在迅速发展,有很多厂家正在推广和推进舒适和安全的应用。
由于这些发展具有全球性,以至于几乎涉及到汽车行业的每一个部分,在政府发展水平上:
(1)欧洲的关键国家是德国,欧洲率先通过Euro-NCAP和相关的汽车工业联盟进行评估。
(2)在北美,美国通过交通部、NHTSA以及汽车行业的各种支持团体,在这方面发挥了主导作用。
(3)在亚洲,日本通过MLIT、JNCAP等公司在推进汽车应用方面走在了前列。
政府为所有汽车技术的运行提供必要的监管框架,政府也制定了一些标准,这些标准之前会被汽车行业忽略,比如行人保护。同时,汽车行业也非常活跃:
(1)从日本开始,丰田、本田、马自达、日产、斯巴鲁等主要汽车制造商都在开发先进的驾驶辅助系统(ADAS),将雷达技术与其他技术相结合,应用范围从简单的盲点检测到面向自动驾驶的应用,如自动停车。
(2)在世界其他地区,**戴姆勒(Mercedes-Benz)、奥迪(Audi)、福特(Ford)、通用汽车(GM)、特斯拉(Tesla)**和其他国际汽车制造商正在把技术推向极限。
(3)当然,汽车制造商无法独自完成这项任务,汽车供应商也是如此,大陆、博世、电装、富士通、奥托立夫和法雷奥等公司都在努力通过创新的汽车应用实现零死亡的目标。
如上所述,在我们迈向自动驾驶的过程中,行人保护是这些应用的关键元素之一,除了汽车行业和汽车供应商,IT和技术行业正在成为该领域的有力竞争对手。
近期参与研发活动的知名公司包括谷歌的无人驾驶汽车项目、Uber的共享出行、与通用汽车合作的自动驾驶Lyft、苹果、亚马逊和机器人开发实体。此外,ISO通过其各种工作组,如ISO WG-14,正在推动这些应用的标准化工作。
本文给出了一些重要的当前和未来的汽车雷达应用,这些应用程序背后的主要思想是感知即时状况、预测,并警告或协助驾驶员减轻危险情况。
本文所涉及的应用可大致分为短期应用和长期应用两大类。虽然远程应用在汽车工业中已经非常成熟,但短期应用仍在积极研究和开发中。在以下几节中,将适当地给出测量参数的精度和分辨率,将传感器分辨率定义为能够识别两个大小和反射特性相同的相邻物体的最小必要条件,反射特性通常由雷达截面(RCS)定义。另一方面,准确度是指被测量量相对于期望值的标准差。
下一节将总结一些关键应用和相应的雷达需求,由于雷达制造商提供的传感器种类繁多,数据表中将给出雷达参数的典型值,并非标准值。
9.2近程雷达
9.2.1 后向检测
1.后方检测盲点检测(BSD)
如图9.1所示,侧视雷达传感器检测盲区内从后视镜中看不到的车辆,一旦检测到,就会向驾驶员提供警告以避免碰撞,特别是在进行变道时。

(图9.1盲点检测场景示意图)
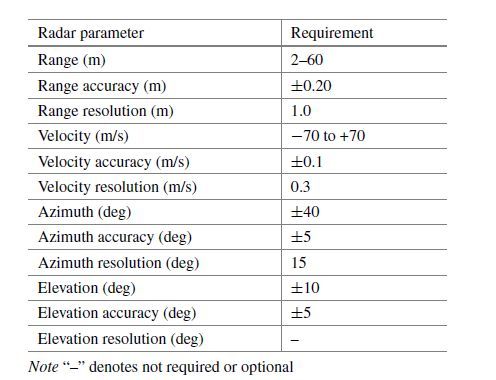
BSD的雷达要求如表9.1所示。

(表9.1雷达对BSD要求)
2. 后方交叉交通警报(RCTA)
该技术与盲点检测类似,只是适用于低速情况,雷达传感器检测后方区域的车辆如图9.2所示。这一点在停车区域尤其重要,因为那里与过路车辆相撞的可能性很高。
(图9.2 RCTA场景示意图)
RCTA的雷达要求如表9.2所示。

(表9.2雷达对RCTA要求)
9.2.2 前向检测
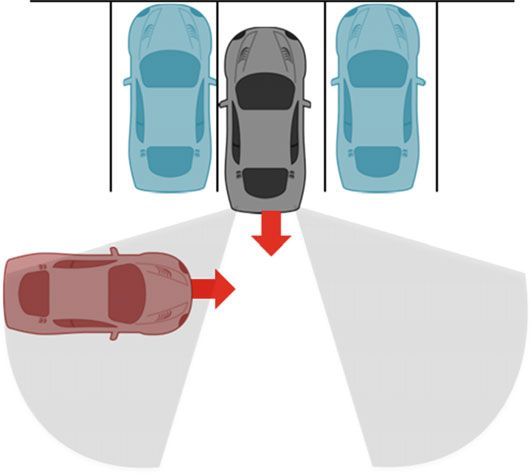
1.前方交叉交通警报(FCTA)
前方交叉车流使用与后方交叉车流相同的概念,只是雷达传感器探测到前方[5]区域的车辆。图9.3给出了一个例子。
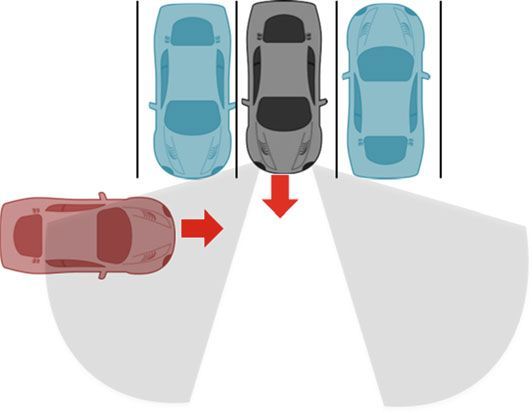
(图9.3 FCTA场景示意图)
雷达对FCTA的要求如表9.3所示。
(表9.3雷达对FCTA要求)
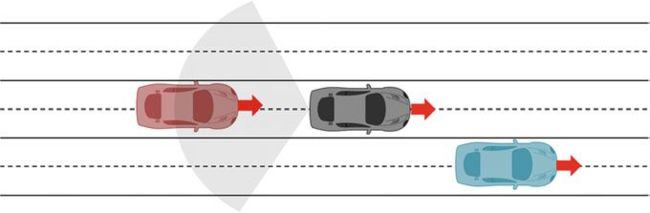
2.切入警告(CIW)
在本例中,雷达传感器从两侧检测到高速行驶的车辆试图切入己方车道,如图9.4所示。如果由于切入机动有碰撞危险,司机会得到警告。

(图9.4 CIW情景示意图)
CIW的雷达要求见表9.4。

(表9.4 CIW雷达要求)
3. 侧面检测侧面碰撞警告(SIW)
利用雷达传感器检测车辆的速度和距离,可以从图9.5所示的区域警告驾驶员即将发生的侧面碰撞。为了达到预期的目标[6],需要较高的测距精度和分辨率。
(图9.5 SIW场景示意图)
雷达要求见表9.5。
(表9.5 SIW雷达要求)
4. 骑自行车的警告(CW)
骑行者通常被归为弱势道路使用者(vru)[7-9]。雷达能探测到骑自行车的人,并警告司机他们的存在。骑自行车的人不容易被司机看到,在一些驾驶情况下会意外出现。图9.6就是这样一个场景的示例。
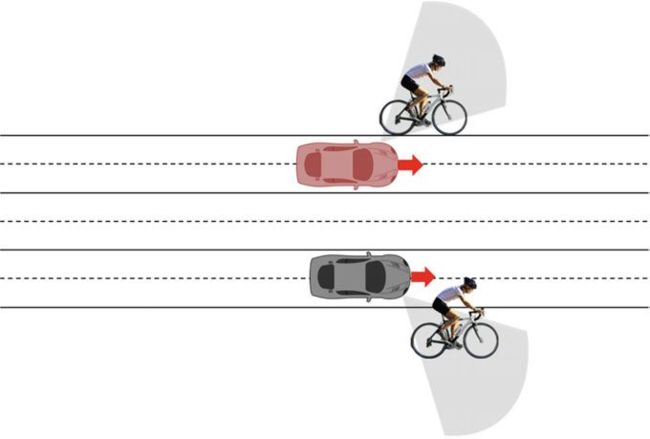
(图9.6 CW情景示意图)
雷达对CW的要求如表9.6所示。

(表9.6 CW雷达参数要求)
9.3远程雷达(LRR)
9.3.1 后向检测
1.追尾警告(RCW)
雷达探测到碰撞的可能性,并向驾驶员发出警告,例如,当其他车辆从后面靠近时,如图9.7所示。RCW被认为是碰撞前系统的一部分[10,11]。
(图9.7 RCW场景示意图)
RCW雷达要求如表9.7所示。
(表9.7 RCW雷达要求)
9.3.2 前向检测
1.自动巡航控制(ACC)
雷达探测到一系列前面的车辆,并自动调整车与车之间的距离,以达到图9.8所示的舒适驾驶。自动紧急制动可纳入ACC功能[12]。

(图9.8 ACC场景示意图)
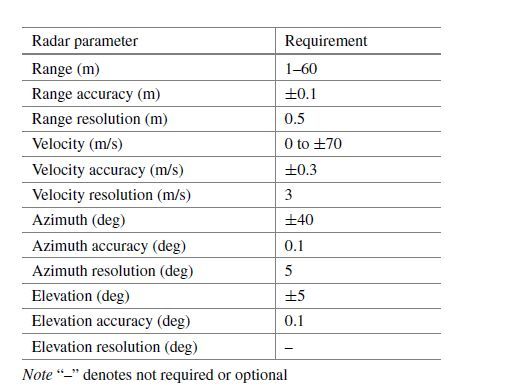
ACC雷达要求如表9.8所示。
(表9.8 ACC雷达要求)
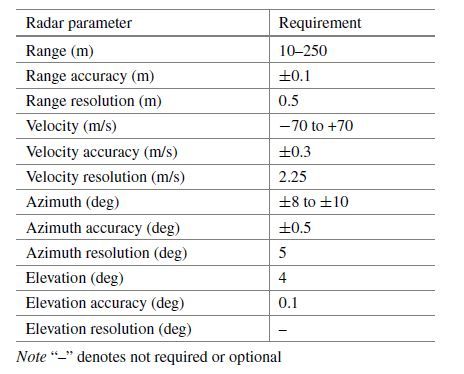
2.行人碰撞警告(PCW)
如图9.9所示,雷达探测到车辆附近有行人,并向驾驶员发出警告。行人保护是自动驾驶的关键组成部分,受到了监管机构和制造商的广泛关注[13,14]。
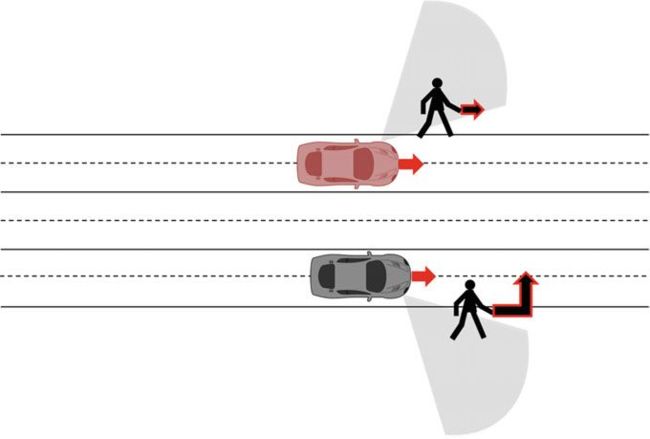
(图9.9 PCW场景示意图)
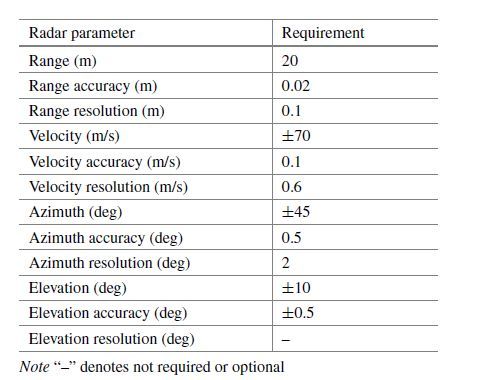
雷达对PCW要求如表9.9所示。

(表9.9雷达对PCW要求)
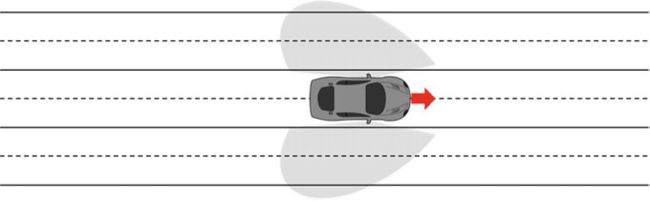
3.向前碰撞警告(FCW)
雷达探测到即将发生的正面碰撞,并启动安全系统以降低碰撞的严重程度,并在过程中向司机发出警告。如果前面的车辆突然减速,就会出现这种情况。准确估计范围对于[15]函数的有效性非常重要。图9.10展示了这样一个场景的示例。

(图9.10 FCW场景示意图)
FCW的雷达要求如表9.10所示。
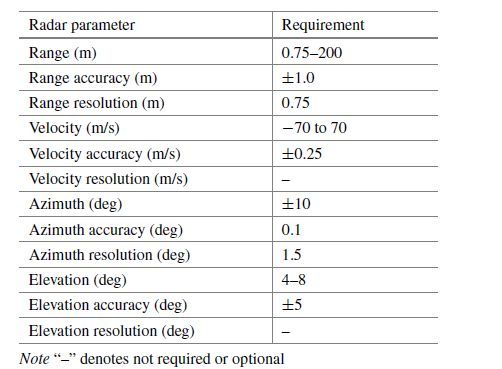
(表9.10雷达要求FCW)
9.4汽车应用趋势
9.4.1未来路线图汽车应用
所有相关政府都对汽车应用的未来有自己的设想,然而,实际的实施将取决于汽车制造商和汽车供应商能够以多快的速度生产必要的配套传感器技术。例如,如果没有图像采集技术,车道检测系统就无法实现。即使有了现有的传感器技术,处理后的传感器数据的可靠性也是至关重要的,一个产生大量假警报的系统对大多数司机来说是不可接受的。
目前的普遍共识是,在未来10-20年内,将从ADAS转向自动驾驶,正如第一章所述,SAE (SAE)定义了包括非自动化在内的六种自动化级别,这被视为目前推进该技术的最佳方式。
快速回顾一下:
Level 0(无自动化),人类司机一直在控制。
Level 1应用碰撞缓解制动,即当碰撞即将发生时自动刹车。
Level 2自动加速/减速中,制动和转向辅助是可能的,
Level 3驾驶系统执行转向和加速/减速操作,包括监控驾驶环境。人类驾驶员控制系统的请求。
Level 4扩展了自动驾驶功能,可以处理所有驾驶责任,即使人类驾驶员没有对干预请求作出适当的响应,Level 1-4级适用于部分驾驶模式,
Level 5适用于所有驾驶模式。不需要人力司机。
路线图:日本、欧洲、美国
以上述自动化水平为总体指导,日本、欧洲、美国的路线图如图9.11、9.12、9.13所示。

((a)按自动化程度编制的一般路线图)
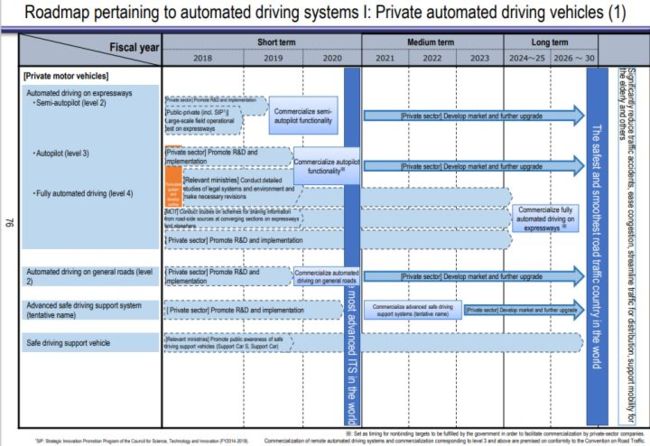
(图9.11 日本自动驾驶发展路线图 (b)到2030年的详细路线图。)
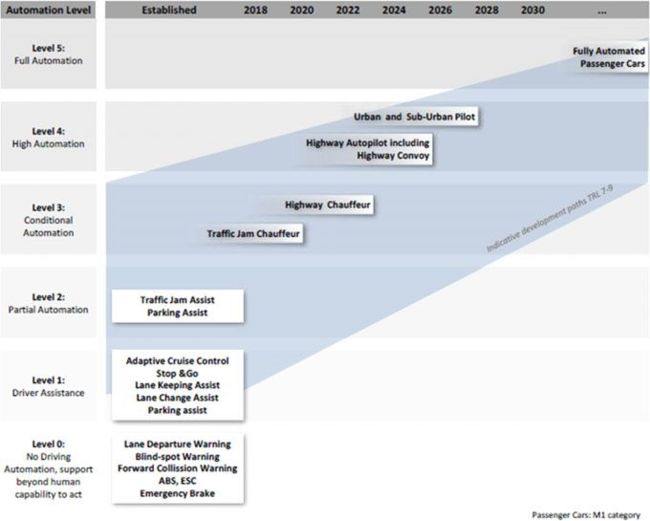
(图9.12 欧洲自动驾驶发展路线图)

(图9.13 美国自动驾驶发展路线图)
汽车制造商的路线图:日本,欧洲,美国
随着各国政府提出的愿景,汽车制造商和供应商也在竞相让自动驾驶成为现实,表9.11显示了全球一些主要汽车制造商的一般已知方向,详细信息可以在文献[5]中找到。

(表9.11自动驾驶水平目标)
在日本,丰田正在推广“高速公路队友”的概念,本田的本田传感概念车,日产的移动概念车,马自达的智能交通系统,以及斯巴鲁正在推进视力概念车。
9.4.2汽车应用的未来贡献
自动驾驶对社会的好处
自动驾驶汽车将在很多方面改善我们的生活。在此,我们列出了自动驾驶汽车的一些好处,这些好处经常被认为是在该领域投入资源的理由。虽然这里概述的内容并不全面,但它们让我们了解了为什么自动驾驶的研究和开发对未来一代很重要,就像交通工具从马匹转向汽车时,总会有赢家和输家,但总体而言,社会会从自动驾驶汽车中获益良多。
1.道路将变得更安全
通过主动感应减少事故数量,可以挽救成千上万人的生命。据估计,在美国,道路上车辆90%的自动驾驶水平,可以减少80%的事故,从而减少66%的死亡人数。自动驾驶汽车的问世将使醉酒和吸毒的司机自动离开方向盘。此外,感官技术可能比人类感官更好地感知环境,看得更远,更好。在能见度较低的情况下,探测到更小、更细微的障碍物是减少交通事故的更多原因。如停车和变道等困难的车辆操作将会简化,使其压力更小,不需要特殊技能。语音指令可以用来对汽车发号施令。
2.改善交通和燃油效率
自动驾驶车辆发生人为失误事故的概率较低,交通拥堵较少。总的来说,增加自动驾驶服务,如提供优步,将有助于增加自动驾驶出租车的数量,反过来有助于减少道路上的汽车总数,缓解整体交通。由于自动驾驶汽车的设计是为了优化加速和刹车效率,它们还将有助于提高燃料效率和减少碳排放。有人认为,自动驾驶汽车的采用可以减少二氧化碳,汽车每年产生的排放量高达3亿吨。
3.会有更多的空闲时间
可以想象,随着汽车承担大部分或全部的驾驶任务,司机将可以自由地更好地利用他们花在汽车上的时间。而不是把所有的时间花在对车辆周围的警惕,如果有的话,司机只会在必要或他们选择这样做的时候控制车辆。
此外,由于交通拥堵的预期减少,它可能会花更少的时间来达到预期的目的地,这将导致创造更多宝贵的时间来做其他事情,除了通勤。在未来的发展中,一旦自动驾驶汽车成为主要交通工具,全世界的通勤者每天总共可以节省10亿小时。
自动驾驶汽车的其他好处之一是可以在长途旅行中睡觉,从而减少驾驶带来的疲劳。无人驾驶汽车将消除司机之间在道路上的争吵,从而减少路怒事件。这些对社会整体福祉有益的小福利的清单是无穷无尽的。
4.增加速度限制
了精心规划和完善的自动驾驶基础设施,可以提高主要高速公路上的速度限制,以反映更安全的驾驶,从而缩短旅程时间。
5.改善生活方式
传统上开车有困难的人,如残疾人、老年人以及非常年轻的人,将能够体验开车旅行的自由。在这样的愿景下,身体残疾的人将不需要任何援助。在使用车辆或驾驶考试之前必须取得驾照的要求将成为过去式。这将减少使用车辆所需的时间,从而改善生活方式。
6.降低保费
自动驾驶汽车可以大幅降低车主的保险费,从而节省大量资金。
7.有自知之明的汽车会减少汽车盗窃
由于自动驾驶汽车很容易被跟踪,窃贼将没有动力去偷它们。
8.为社会各阶层提供新的就业机会
自动驾驶汽车将在软件设计和工程领域创造新的就业机会。更多的玩家也可以加入汽车行业,导致竞争和降低汽车成本。
自动驾驶汽车有上述种种优点,但也存在一些缺点:
(1)一开始,无人驾驶汽车可能会超出大多数普通人的价格范围,但随着量产,价格将在未来20年下降。卡车司机和出租车司机将失去工作,因为自动驾驶汽车将取代管理车辆,但他们可以取代管理车辆。
(2)一个计算机故障或软件漏洞可能会导致严重的碰撞,就像特斯拉的情况,自动驾驶系统未能识别出在不受控制的十字路口的一辆过路卡车。
(3)侵犯隐私是另一个问题,因为汽车将依赖于收集的位置和用户信息。
(4)黑客也有可能进入车辆的软件,远程控制车辆的操作,这些问题目前正在通过使用安全协议来解决。
尽管仍有如上所述需要解决的领域,但社会将从自动驾驶汽车的引入中获益良多。就像每一项新技术一样,挑战总是存在的,但好处远远大于坏处。未来,在传感技术、道路基础设施和安全方面的投资将非常重要。
9.4.3未来方向和结论
正如这一节概述,汽车工业将经历快速增长在未来的20-30年。一些先进的技术已经在市场上上市,尽管在有限的驾驶情况下,如高速公路。这种增长的一个关键方面将是引入传感技术,这将挽救生命,并提高驾驶的舒适性。这种增长将导致更复杂的雷达信号处理应用,特别是自动驾驶的目标检测、跟踪和识别系统,在所有的自动驾驶系统中,感知和预测车辆周围动态的能力将是至关重要的。
感谢阅读,如果本文对你有帮助,希望能够给我点一个赞!
参考文献
- Schiementz, M.: Postprocessing Architecture for an Automotive Radar Network. Cuvillier
Verlag (2005)- Continental SRR-20X Industrial Sensor Data Sheet, https://www.continental-automotive.
com/getattachment/e98ad36c-49d6-400f-8b99-32ff1ef4e45b/SRR20X-Datasheet-EN.pdf.pdf
(2012). Accessed 17 Mar 2019- ERTRAC Task Force: Automated Driving Roadmap: Connectivity and Automated Driving.
ERTRAC, pp. 1–16 (2017)- Underwood, S.: Automated, Connected, and Electric Vehicle Systems, Expert Forecast and
Roadmap for Sustainable Transportation. Institute for Advanced Vehicle Systems, University
of Michigan, pp. 75–97, (2014)- NanoRadar CAR70 Radar Sensor Data Sheet: http://www.nanoradar.cn/english/pdf/car70/
car70bps.pdf (2017). Accessed 17 Mar 2019- Hasch, J., et al.: Millimeter-wave technology for automotive radar sensors in the 77 GHz
frequency band. IEEE Trans. Microw. Theor. Tech. 60(3), 845–860 (2012)- Rohling, H.: HProject Final Report, ATRAC: Advanced Radar TRAcking and Classification
for enhanced road safety, 404 Not Found 9730/final1-artrac-final-report-final.pdf (2014). Accessed 17 Mar 2019- Schubert, E., et al.: Target modeling and deduction of automotive radar resolution requirements
for pedestrian classification. Int. J. Microw. Wirel. Tech. 7, 433–441 (2015)- Stolz, M., et al.: Multi-target reflection point model of cyclists for automotive radar. In: European
Radar Conference (EURAD), Nuremberg (2017)- Lübbert, U.: Target Position Estimation with a Continuous Wave Radar Network. Cuvillier
Verlag (2005)- Tu, N.: Automotive radar system architecture and evaluation with EEs of solutions. In: Automotive
Radar Seminar, Taiwan (2016)- Fölster, F., Rohling, H.: Signal processing structure for automotive radar. Frequenz 60(2),
20–24 (2006)- Wu, T.: Pedestrian and Vehicle Recognition Based on Radar for Autonomous Emergency
Braking. SAE Technical Paper, No. 2017-01-1405 (2017)- Hamdane, H., et al.: Issues and challenges for pedestrian active safety systems based on real
world accidents. In: Accident Analysis and Prevention, pp. 53–60. Elsevier (2015)- Zador, P.L., Krawchuk, S.A., Voas, R.B.: Final Report—Automotive Collision Avoidance System
(ACAS) Program. National Highway Traffic Safety Administration (NHTSA), Aug 2000- Kantei: Public-Private ITS Initiative/Roadmaps 2018. https://japan.kantei.go.jp/policy/it/2018/
2018_roadmaps.pdf, pp. 74–82, 15 June 2018. Accessed 17 Mar 2019- Bertoncello, M., Wee, D.: Ten Ways Autonomous Driving Could Redefine the Automotive
World. https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/
ten-ways-autonomous-driving-could-redefine-the-automotive-world (2015). Accessed 17Mar
2019- Goodman, P.: Advantages andDisadvantages of Driverless Cars. https://axleaddict.com/safety/
Advantages-and-Disadvantages-of-Driverless-Cars (2019). Accessed 17 Mar 2019