Pytorch
文章目录
- pytorch
-
- self.register_buffer(‘my_buffer’, self.tensor)
- torch.masked_fill_()
- torch.bmm()
- nn.Embeding()
- nn.tensor()
- nn.Cov2d()
- nn.convTransposed()
- torch.nn.functional.unfold()
- torch.nn.MaxPool2d()
- torch.nn.AdaptiveAvgPool2d()
- torch.Linear()
- n.ReLu(inplace=false)
- nn.dropout2d()
- nn.BatchNorm1d/2d() nn.LayerNorm()未
- torch.randn(size,*args)
- torch.optim
- forward函数
- nn.MSELoss(X,Y,reduction) mean square error
- torch.nn.NLLLoss()
- torch.manual_seed()
- torch.sum()
- model.state_dict().items()
- torch.max()
- torch.nn.Module.zero_grad() 有待考究
- backward()反向传播函数
- torch.optim.SGD()
- torch.optim.lr_scheduler()
- 梯度下降 反向传播 更新参数
- torch.nn.functional.interpolate()
- torch.load()&torch.load_state_dict()& torch.save()
- torch.flatten()
- torch.softmax()在图像分割中的使用
- nn.ModuleList() 和nn.Sequential()
- torch.utils.data.DataLoader() 有待考究
- model.train 与model.val
- torch.item()
- torch.tensor() 与torch.from_numpy()的区别
- .cuda() 与 .to(device)将模型送到GPU上训练
- torch.nn.DataParallel() 有待考究
- param.requires_grad = False 有待考究
- torch.update() model.apply()
- Variable的使用
- DataLoder参数详解
- torch.tile()
- torchvision
-
- torchvision.transform.Normalize()
- torchvision.transform.Tensor()
- torchvision.Datasets.ImageFolder
- torchvision.transforms
- torch.backends.cudnn.benchmark
- argparse.ArgumentParser()
- TorchSummary
- tqdm
- tensorboard
- torch hub
- 其他注意事项
-
- epoch、iteration和batchsize
- self.modules() children () parameters()
- permute(dims) & torch.transpose()
- reshape()/view()
- squeeze()/unsqueeze()
- pytorch网络模型参数形式
- Variable在神经网络中的使用
- crop与resize的区别
pytorch
self.register_buffer(‘my_buffer’, self.tensor)
- 参考链接3
- 模型参数有两种,一种是Parameter和buffer,parameter在model.state_dict()中,可以通过torch.save(model.state_dict())保存parameter,要想parameter不更新参数,可以设置grad_required=False并且将其梯度清零(因为grad_required=False只是梯度不更新,为了参数不更新,还需要将梯度清零)。buffer类型变量不参与模型更新
- 对于类成员变量,其无法通过model.state_dict()存储下来,类成员变量不在模型参数里面,为了解决这个问题,可以将类成员变量进行登记,self.register_buffer(“名字”,张量),登记完之后,类成员变量的类型是buffer。类成员变量就会跟随model进入GPU或是CPU,但buffer类型的变量是不会进行数据更新的
- 总而言之,类成员变量是类的,需要将其作为模型参数的话,需要进行登记,并且登记完之后的类型是buffer,不参与梯度更新。
import torch.nn
import torch.nn as nn
class my_model(nn.Module):
def __init__(self):
super(my_model, self).__init__()
self.conv = nn.Conv2d(1, 1, 3, 1, 1)
self.tensor = torch.randn(size=(1, 1, 5, 5))
self.register_buffer('my_buffer', self.tensor)
def forward(self, x):
return self.conv(x) + self.my_buffer
x = torch.randn(size=(1, 1, 5, 5))
x = x.to('cuda')
model = my_model().cuda()
model(x)
print(model.state_dict()) # 登记之后就包括buffer和parameter两个类型的参数
print(model.my_buffer) # 可以通过model.parameter()或者是model.buffer()来查看参数
##torch.repeat()
- 参考链接
- 一个参数x 将数据看做一个整体,重复x次 维度不变
- 两个参数m,n 将数据看做一个整体,做到m行n列 升维
- 三个参数c,m,n 将数据看做一个整体,做到 (c,m,n) 升维
torch.masked_fill_()
- torch.mask_fill_(mask,value) 用value的值填充mask中为ture的值
import torch
# 需要保证mask的和要被mask的数据是相同大小的
a = torch.randn(5, 6)
x = [5, 4, 3, 2, 1]
mask = torch.zeros(5, 6, dtype=torch.float)
for e_id, src_len in enumerate(x):
mask[e_id, src_len:] = 1
mask = mask.to(device='cpu')
mask = mask > 0
print(mask)
a = a.masked_fill_(mask, -float('inf'))
print(a)
# tensor([[False, False, False, False, False, True],
# [False, False, False, False, True, True],
# [False, False, False, True, True, True],
# [False, False, True, True, True, True],
# [False, True, True, True, True, True]])
# tensor([[ 0.0789, 1.1909, -0.7155, 1.1650, 0.5295, -inf],
# [-1.8139, -0.9412, -0.5908, 1.5424, -inf, -inf],
# [-0.7571, -0.1321, -0.0579, -inf, -inf, -inf],
# [ 0.8245, 0.4047, -inf, -inf, -inf, -inf],
# [ 0.5517, -inf, -inf, -inf, -inf, -inf]])
torch.bmm()
- 第一个维度不算,剩下维度进行矩阵相乘
nn.Embeding()
- num_embeddings 词数量,但在embeding中,使用的是词向量的下标
- embedding_dim 用多少维的向量表示词
- padding_idx 指定索引为0
- Embeding是根据词语下标进行词嵌入
- 这样不设计参数的模式,词嵌入是随机初始化的,可以考虑用embdein.parameter来设计参数
# 将hello的下边输入进行词嵌入
word_to_id = {'hello':0, 'world':1}
embeds = nn.Embedding(2, 10)
hello_idx = torch.LongTensor([word_to_id['hello']])
hello_embed = embeds(hello_idx)
print(hello_embed)
# x 就是词所代表的下标,padding_idx会将索引为3的置于0
# embeding已经将参数设计好了,所以不同序列相同词下标的位置嵌入是一样的
x = torch.LongTensor([[2, 2, 3], [1, 3, 5]])
embeddings = nn.Embedding(6, 4, padding_idx=3)
print(embeddings(x))
print(embeddings(x).size())
nn.tensor()
生成张量,可以是tensor类型,numpy类型,list类型。。。。
nn.Cov2d()
- torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
是一个二维卷积操作dilation 扩张卷积 bias 学习偏差 groups 分组卷积的意思当groups==inchannel时,就是深度可分离卷积的depthwise conv- 卷积核的参数默认不为1,而且还各不相同,其实也无所谓,反正这些参数也是要学习的
- 计算公式
卷积一般是向下取整,池化一般是向上取整
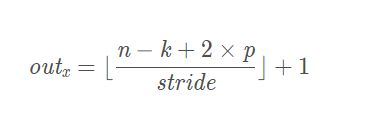
- n:特征图的宽或者高
- k:卷积核的尺寸
- p:padding的数值,一般指单侧填充几个单元
- stride:顾名思义
# import torch
# from torch import nn
# torch.random.manual_seed(123)
# data = torch.randint(0, 2, size=(1, 3, 2, 2), dtype=torch.float)
# print(data)
# cov1 = nn.Conv2d(in_channels=3, out_channels=1, kernel_size=2,bias=False)
# data1 = cov1(data)
# print(data1)
# print(cov1.weight)
# print(cov1.bias)
import torch
from torch import nn
torch.random.manual_seed(123)
data = torch.randint(0, 2, size=(1, 3, 4, 4), dtype=torch.float)
print(data)
cov1 = nn.Conv2d(in_channels=3, out_channels=5, kernel_size=2,bias=False)
data1 = cov1(data)
print(data1)
print(cov1.weight)
print(cov1.bias)
nn.convTransposed()
- 用一个大卷积核对一个小图片进行卷积 使图片空间分辨率提高
- 计算公式
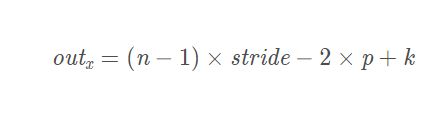
- n:特征图的宽或者高
- k:卷积核的尺寸
- p:padding的数值,一般指单侧填充几个单元
- stride:顾名思义
import os
import torch
import torchvision
data = torch.randint(0, 3, (1, 3, 2, 2),dtype=torch.float)
print(data)
transposed = torch.nn.ConvTranspose2d(in_channels=3, out_channels=3, kernel_size=3, padding=0, output_padding=0, bias=True)、
# 这里步长没写,默认为1
m = transposed(data)
print(m)
# tensor([[[[0., 1.],
# [2., 1.]],
#
# [[0., 2.],
# [2., 1.]],
#
# [[2., 2.],
# [1., 0.]]]])
# tensor([[[[-0.0821, -0.4113, 0.0484, 0.4625],
# [ 0.1062, 0.2858, 0.2982, 0.0472],
# [-0.0353, -0.7860, -0.3782, -0.4534],
# [-0.5581, -0.2484, -0.3132, -0.1749]],
#
# [[-0.0031, -0.3477, 0.1190, 0.1946],
# [-0.0188, 0.3423, 0.4817, 0.5761],
# [ 0.4029, 0.0881, 0.7544, 0.1780],
# [-0.2401, -0.0292, 0.0744, -0.0255]],
#
# [[-0.1855, -0.2864, 0.0705, 0.7010],
# [-0.8852, -0.6460, 1.1196, 1.0175],
# [-0.4024, 0.7571, 1.3162, 0.1160],
# [ 0.3959, 0.3643, -0.3875, -0.2538]]]],
torch.nn.functional.unfold()
- 主要用于将图片进行patch分片操作
- 设置kernel_size等同于patch的分辨率,padding设置为kernel_size是为了不重叠。然后会将得到的立体柱自动拉成一维张量也就是token;序列长度不需要再计算
def unfold(input, kernel_size, dilation=1, padding=0, stride=1):
"""
input: tensor数据,四维, Batchsize, channel, height, width
kernel_size: 核大小,决定输出tensor的数目。稍微详细讲
dilation: 输出形式是否有间隔,稍后详细讲。
padding:一般是没有用的必要
stride: 核的滑动步长。稍后详细讲
"""
import numpy as np
import torch
import torch.nn.functional as f
image_data = torch.randn(1,3,224,224)
output = f.unfold(image_data,kernel_size=(16,16),stride=16)
print(output.shape)
# 224*224/16/16=196
# 16*16*3=768#
# 序列长度和token要重排列
# torch.Size([1, 768, 196])
torch.nn.MaxPool2d()
参数依次为- kernel_size :表示做最大池化的窗口大小,可以是单个值,也可以是tuple元组
- stride :步长,可以是单个值,也可以是tuple元组
- padding :填充,可以是单个值,也可以是tuple元组
- dilation :控制窗口中元素步幅
- return_indices :布尔类型,返回最大值位置索引
- ceil_mode :布尔类型,为True,用向上取整的方法,计算输出形状;默认是向下取整。
import torch
from torch import nn
torch.random.manual_seed(123)
data = torch.randint(0, 2, size=(1, 3, 4, 4), dtype=torch.float)
print(data)
pool1 = nn.MaxPool2d(kernel_size=2,stride=2)
data1 = pool1(data)
print(data1)
# tensor([[[[0., 1., 0., 0.],
# [0., 0., 0., 1.],
# [1., 0., 1., 1.],
# [0., 1., 0., 1.]],
#
# [[0., 1., 1., 0.],
# [0., 0., 1., 1.],
# [1., 0., 1., 0.],
# [0., 0., 0., 1.]],
#
# [[1., 1., 0., 0.],
# [1., 0., 0., 1.],
# [0., 1., 0., 1.],
# [1., 1., 0., 0.]]]])
# tensor([[[[1., 1.],
# [1., 1.]],
#
# [[1., 1.],
# [1., 1.]],
#
# [[1., 1.],
# [1., 1.]]]])
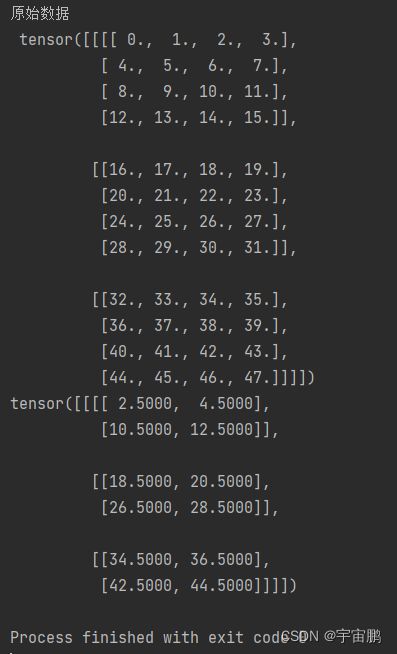
torch.nn.AdaptiveAvgPool2d()
- 自适应平均池化 通道数不变,但可以指定输出特征层的长和宽 并且单个参数x表示指定长宽为x*x,与torch.nn.AdaptiveAvgPool2d((x,x))一个意思,当然长宽也可以不一样
意义:可能也许就是降维、去除冗余信息、对特征进行压缩、简化网络复杂度、减小计算量、减小内存消耗等等
参考链接1 函数解析
参考链接2 函数参数设置
参考链接3 池化的种类和意义
import torch
import numpy as np
from torch import nn
if __name__ == '__main__':
torch.manual_seed(123)
data = torch.arange(0, 48).view(1, 3, 4, 4).float()
print("原始数据\n", data)
module1 = nn.AdaptiveAvgPool2d(2) # 跟(2,2)一个意思
# module2 = nn.AdaptiveAvgPool2d((2, 2))
module3 = nn.AdaptiveAvgPool2d((2, 1)) # 指定长为2 宽为1
print(module1(data))
# print(module2(data))
# print(module3(data))
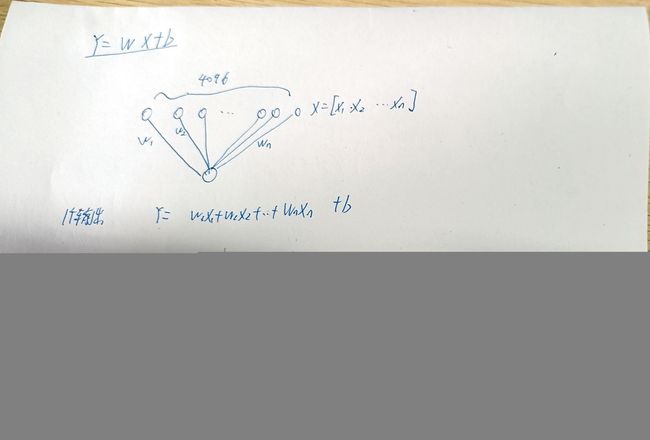
torch.Linear()
- torch.Linear(in_chanel,out_chanel,bias)
Y = W * X + b,W是权重,b是偏差,X是输入张量,Y输出张量,这里偏置不是张量的每一维度上都有偏置,而是权重和张量相乘后,再加上偏置b,有多少个输出向量就有多少个偏置- 假设输入一个多维张量,size=6 * 6 * 256,将其先flatten成一维张量,大小为4096,可以看成1 * 1*4096,也可以看成4096个点,设置输出通道为1,则权重张量1 * 4096,偏置张量大小1 ; 设置输出通道为10,则权重张量为10 * 4096(相当于10行的1 * 4096,一个1 * 4096一个输出,10行则10个输出),偏置张量大小为10
- 记忆为向量的内积
import torch
from torch import nn
data = torch.randint(0, 5, size=(1, 3, 3, 3), dtype=torch.float)
print(data)
data1 = torch.flatten(data)
print(data1)
connected_layer = nn.Linear(in_features=27, out_features=10)
print(connected_layer.weight.shape)
print(connected_layer.bias.shape)
data2 = connected_layer(data1)
print(data2)
# tensor([[[[1., 0., 0.],
# [4., 0., 1.],
# [2., 4., 0.]],
#
# [[0., 4., 0.],
# [4., 3., 1.],
# [4., 3., 1.]],
#
# [[4., 1., 2.],
# [1., 2., 0.],
# [1., 4., 2.]]]])
# tensor([1., 0., 0., 4., 0., 1., 2., 4., 0., 0., 4., 0., 4., 3., 1., 4., 3., 1.,
# 4., 1., 2., 1., 2., 0., 1., 4., 2.])
# torch.Size([10, 27])
# torch.Size([10])
# tensor([-0.9377, -0.8973, -1.1362, 0.4944, -0.3523, 0.6868, -0.6572, 1.0271,
# -0.5543, -0.7574], grad_fn=)
- 多维张量的全连接 ,16 * 10的多维向量,模型w是3 * 10 ,当用一行的w在多维向量上全连接是,分别得到16个数,按列排列;一共三行,故输出维16 * 3的多维向量
import torch
import torch.nn as nn
model = nn.Linear(10, 3)
print(model.state_dict()['weight'].shape)
x = torch.randn(16, 10)
y = torch.randint(0, 3, size=(16,)) # (16, )
logits = model(x) # (16, 3)
print(logits.shape)
# torch.Size([3, 10])
# torch.Size([16, 3])
n.ReLu(inplace=false)
- 激活函数
- inplace
原地 - inplace默认false(不原地) 原对象不变,会产生一个新的对象 类似值传递
- inplace为true(原地),原对象的值会改变,不产生一个新的对象,地址传递 参考链接

import torch
import torch.nn as nn
class net(nn.Module):
def __init__(self):
super(net, self).__init__()
# self.linear = nn.Linear(3, 5)
self.relu1 = nn.ReLU(inplace=False)
def forward(self,x):
# x = self.Linear(x)
print(x) # 输入数据x
y = self.relu1(x)
print(x) # 当inplace=False,x保持不变,当inplace=True,x的值会变,更y一样
return y
if __name__ == '__main__':
model = net()
torch.manual_seed(1223)
input =torch.randn(3,2)
model(input)
nn.dropout2d()
- nn.dropout( p) p是概率,以p概率将某一维度的参数置为0, nn.dropoutd()是以概率p将某参数置为0
参考链接
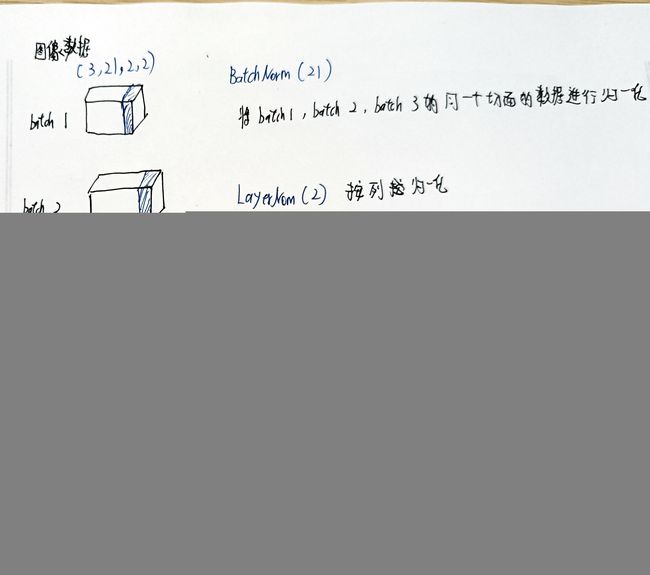
nn.BatchNorm1d/2d() nn.LayerNorm()未
- 参考链接1
- 参考链接2 感谢这位大哥送来的火箭
- ☆输入数据是(批数 通道数 宽 高) num_features是指输出通道数 ,这个跟输入通道数一样☆
#————————————————————————BatchNorm1d与BatchNorm2d在二维数据和三维数据下数据呈现————————————————————————
import torch
from torch.nn import BatchNorm1d
from torch.nn import BatchNorm2d
import numpy as np
from torch.nn import LayerNorm
input = torch.randint(0, 4, size=(4, 3), dtype=torch.float)
# input = torch.randint(0, 4, size=( 2, 4, 3), dtype=torch.float)
# 在前面加入批次2,就变得很奇怪 BatchNorm1d(4)才跑的通 有理解的大哥可以私我
print(input)
c = BatchNorm1d(3)
print('-'*100)
print(c(input))
print('-'*100)
input = torch.randint(0, 4, size=(2, 3, 2, 2), dtype=torch.float)
print(input)
print('-'*100)
b = BatchNorm2d(3)
print(b(input))
print('-'*100)
import torch
from torch.nn import LayerNorm
input = torch.randint(0, 3, size=(2, 2, 2, 3), dtype=torch.float)
print(input)
print('-'*100)
# b = LayerNorm((3))
# b = LayerNorm((2, 3))
# b = LayerNorm((2, 2, 3))
b = LayerNorm((2, 2, 2, 3))
print(b(input))
print('-'*100)
torch.randn(size,*args)
- randn是
标准正态分布函数,返回一个指定shape的由标准正态分布数据组成的对象 X= torch.randn(2,2,3,4) 这就表示batch_size =2,通道为2 图片高为3 宽为4这样调用torch.Cov2d(2·····)时iin_channels=2batch_size分批卷积的意思
torch.randn(4) 4行1列
tensor([-2.1436, 0.9966, 2.3426, -0.6366])
torch.randn(2, 3) 2行3列
tensor([[ 1.5954, 2.8929, -1.0923],
[ 1.1719, -0.4709, -0.1996]])
torch.optim
- 是一个
优化函数库,其中可以设置学习率lr 一般设置为1e-2
forward函数
- 实例化模型对象的时候,不需要调用forward,会自动执行,因为在__call__函数中调用了forward函数
nn.MSELoss(X,Y,reduction) mean square error
-
均方差损失函数X,Y是矩阵或者向量,根据reduction返回标量还是向量,reduction有none,mean,sum 默认为mean -
参考链接
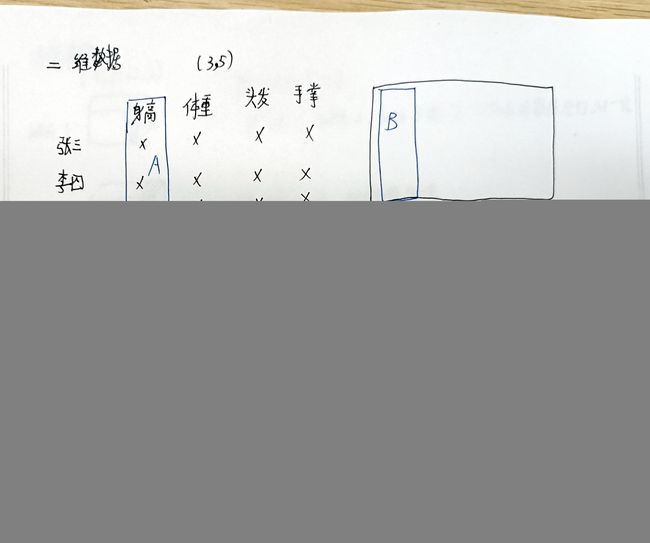
torch.nn.NLLLoss()
- 使用
torch.nn.NLLLoss()需要先对数据进行过log_softmax()因为softmax之后,数据都是在0 1之间,再经过log之后,数据全都为负数,但是求取损失的时候,使用的是绝对值 - 参考链接
- 因为标签和输出的维度是不一样的,所以计算的时候会先对label进行补0,使得标签和输出数据的维度一样。
- 在二维情况下,数据为B * C(B这里应该是类别,C是类别的属性,就是身高体重这些) ,则标签为1 * B ,进行损失函数计算的时候,会根据标签,在B * C 的多维向量上进行0 1填充。之后根据P(x)log(Q(x))计算交叉熵。
参考链接更清晰。

# CrossEntropyLoss()=log_softmax() + NLLLoss()
import torch
torch.manual_seed(123)
input = torch.randn(3, 3)
output = torch.log_softmax(input,dim=1)
print(output)
label = torch.tensor([0,1,2])
print(label)
LOSS = torch.nn.NLLLoss()
print(LOSS(output, label))
cerrition = torch.nn.CrossEntropyLoss()
print(cerrition(input,label))
# tensor([[-1.1097, -0.8778, -1.3678],
# [-1.0825, -2.0390, -0.6328],
# [-1.7747, -1.5574, -0.4784]])
# tensor([0, 1, 2])
# tensor(1.2090)
# tensor(1.2090)
- 对于图片,B * C * H * W,则标签为B * H * W,通道数C是类别总数,有21类,则C为21 在对像素点分类的时候,对通道数进行log_softmax,之后根据标签选择数据计算作为loss(根据交叉熵
P(x)log(Q(x)) P为真值,Q为预测值,标签选中的值是1,没有选中的值为0 在像素点分类中,假设 21个通道,就是21个类别,label=10,根据公式,因为没有选中为0,就不需要管,选中为1,根据公式计算就得到loss),这是一个点。对整张图片 就是所有像素点的各自的loss相加求取均值,作为图像的loss - 值得注意的是,nn.CrossEntropyLoss()中的参数可以设置权重,用来平衡类别不均匀的情况,reduction可以选择是mean还是sum
import torch
data = torch.rand(1, 3, 1, 1)
print(data)
label = torch.randint(0, 3, (1, 1, 1))
print(label)
soft_data = torch.softmax(data, dim=1)
print(soft_data)
log_soft_data = torch.log(soft_data)
print(log_soft_data)
criterion = torch.nn.CrossEntropyLoss()
print(criterion(data, label))
# tensor([[[[0.4181]],
#
# [[0.6438]],
#
# [[0.6271]]]])
# tensor([[[1]]])
# tensor([[[[0.2869]],
#
# [[0.3595]],
#
# [[0.3536]]]])
# tensor([[[[-1.2486]],
#
# [[-1.0230]],
#
# [[-1.0397]]]])
# tensor(1.0230)
torch.manual_seed()
- manual(手工)设置随机数种子,这样每次运行得到的随机数都一样
就相当于给生成的一群随机数一个编号
import torch
torch.manual_seed(0)
print(torch.rand(1)) # 返回一个张量,包含了从区间[0, 1)的均匀分布中抽取的一组随机数
# 结果总是tensor([0.4963]) 就相当于给生成的一群随机数一个编号
torch.sum()
求和函数,默认求取所有数字和,并且维度压缩,也可以指定维度,求取指定维度的和,torch.sum(input,dim,keepdim)- dim指定维度(bool型 0,1,····) keepdim是都压缩维度,因为求和之后宽度会带来维度的减少
- 如果是高维的话,比如data = (3, 2, 2),dim=0,指的是按通道进行相加(用一根针朝通道方向穿过覆盖的点);dim=1,指高度方向进行相加(依然用一根针朝高度方向穿过,将覆盖的点相加)。另外一个就是可以切面相加,比如说指定dim=(0,1)在data数据中,就表示切面
import torch
import torch.nn.functional as F
torch.manual_seed(123)
inputs = torch.randint(0, 4, (3, 2, 2), dtype=torch.float)
print(inputs)
# 如果维度不是列表就表示穿过的线上的点进行相加
print('穿针:')
print(torch.sum(inputs, axis=[0]))
print(torch.sum(inputs, axis=[1]))
# 如果维度是2个维度,这个就表示切片 面上所有点进行相加
print('切片')
print(torch.sum(inputs, dim=[0, 1]))
print(torch.sum(inputs, dim=[1, 2]))
# 换言之,如果维度是三个,那不就刚好是切一个立体块块出来
print('切立体块')
print(torch.sum(inputs))
print(torch.sum(inputs, dim=[0, 1, 2]))
# tensor([[[2., 1.],
# [2., 2.]],
#
# [[0., 2.],
# [2., 1.]],
#
# [[3., 2.],
# [3., 1.]]])
# 穿针:
# tensor([[5., 5.],
# [7., 4.]])
# tensor([[4., 3.],
# [2., 3.],
# [6., 3.]])
# 切片
# tensor([12., 9.])
# tensor([7., 5., 9.])
# 切立体快
# tensor(21.)
# tensor(21.)
model.state_dict().items()
- state_dict是在定义了model或optimizer之后pytorch自动生成的,可以直接调用.保留了可以训练的偏差、权重等
- state_dict参数字典 items的意思是字典键值对输出
for name, param in model.state_dict().items():
print(name,param.requires_grad=True)
torch.max()
- 求取指定维度的最大值 或者全局最大值 (0 为列 1 为行)
- 返回为元组(指定维度的最大值,指定维度的索引)
import torch
data = torch.randint(1, 10, size=(3, 3))
print(data)
print(torch.max(data,dim=0))
print(torch.max(data,dim=0)[0])
print(torch.max(data,dim=0).values)
# tensor([[8, 5, 5],
# [8, 7, 9],
# [2, 3, 8]])
# torch.return_types.max(
# values=tensor([8, 7, 9]),
# indices=tensor([0, 1, 1]))
# tensor([8, 7, 9])
# tensor([8, 7, 9])
参考链接
torch.nn.Module.zero_grad() 有待考究
- 反向传播前,将模型所有参数
梯度(grad)清零 参考链接
backward()反向传播函数
- 计算误差后,通过反向传播计算梯度,来使误差最小 。反向传播的目标是优化权重,以便神经网络能够学习如何正确地将任意输入映射到输出。
参考链接
torch.optim.SGD()
- params 需要随机梯度下降的参数,一般是模型的可学习的参数
- lr 学习率,过大,收敛快,但容易跳过极值点;过小,收敛速度慢
momentum 冲量,使数据具有惯性,减少动荡,增加离开局部盆地的可能性 有待考究- 其他暂无
torch.optim.lr_scheduler()
- optimizer 优化器
- epoch_size 轮次,多少轮后更新一次学习率
- gamma 学习率变为原来的几分之几
- 参考链接
import torch
import torch.nn as nn
from torch.optim.lr_scheduler import StepLR
import itertools
class model(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=3, kernel_size=3)
def forward(self, x):
pass
net_1 = model()
optimizer_1 = torch.optim.Adam(net_1.parameters(), lr=0.1)
scheduler_1 = StepLR(optimizer_1, step_size=3, gamma=0.1)
print("初始化的学习率:", optimizer_1.defaults['lr'])
for epoch in range(1, 11):
# train
optimizer_1.zero_grad()
optimizer_1.step()
print("第%d个epoch的学习率:%f" % (epoch, optimizer_1.param_groups[0]['lr']))
scheduler_1.step()
# 初始化的学习率: 0.1
# 第1个epoch的学习率:0.100000
# 第2个epoch的学习率:0.100000
# 第3个epoch的学习率:0.100000
# 第4个epoch的学习率:0.010000
# 第5个epoch的学习率:0.010000
# 第6个epoch的学习率:0.010000
# 第7个epoch的学习率:0.001000
# 第8个epoch的学习率:0.001000
# 第9个epoch的学习率:0.001000
# 第10个epoch的学习率:0.000100
梯度下降 反向传播 更新参数
- 这三个往往同时出现
for i in range(3000):
y_predict=model(x)
loss=Loss(y_predict,y)
optimizer.zero_grad() # 梯度反向传播前清0 因为每次迭代之后,梯度并不清除,不归零,梯度会累加
loss.backward() # 反向传播 来使可以更新权重 使误差下降
optimizer.step() # 更新参数
if (i+1)%100==0:
print("[training] step: {0} , loss: {1}".format(i+1,loss))
torch.nn.functional.interpolate()
插值函数,将图像的分辨率提高,更加的清晰- torch.nn.functional.interpolate(input, size=None, scale_factor=None, mode=‘nearest’, align_corners=None)
input为输入数据,size为指定输出大小,scale_factor为放大倍数,mode是选择插值函数align_corners为是否选择对齐对角像素点 - size和scale_factor说明一个就行
例输入1 * 3 * 2 * 2 ,想要得到1 * 3 * 4 * 4 指定size(4,4)或者指定scale_factor为4就行 - mode 有多个选择 有线性插值 双线性差值等
- align_corners=True 表示输入 输出图像的对角像素点相等(就是一般我们理解的插值),align_corners=False 表示一般情况下对输入输出图像的对角像素不相等 而且二者插值方式有一些不一样 具体不清楚 搞不懂
import torch.nn.functional as F
import torch
if __name__ == '__main__':
data = torch.arange(0, 4).view(1, 1, 2, 2).float()
print("原始数据:\n",data)
new_data1 = F.interpolate(data, mode="bilinear", size=(4, 4), align_corners=True)
new_data2 = F.interpolate(data, mode="bilinear", scale_factor=2, align_corners=True)
new_data3= F.interpolate(data, mode="bilinear",size=(4, 4), align_corners=False)
print("new_data1\n", new_data1)
print("new_data1与new_data2相比:", new_data2.equal(new_data1))
print("new_data3:\n",new_data3)
# 原始数据:
# tensor([[[[0., 1.],
# [2., 3.]]]])
# new_data1
# tensor([[[[0.0000, 0.3333, 0.6667, 1.0000],
# [0.6667, 1.0000, 1.3333, 1.6667],
# [1.3333, 1.6667, 2.0000, 2.3333],
# [2.0000, 2.3333, 2.6667, 3.0000]]]])
# new_data1与new_data2相比: True
# new_data3:
# tensor([[[[0.0000, 0.2500, 0.7500, 1.0000],
# [0.5000, 0.7500, 1.2500, 1.5000],
# [1.5000, 1.7500, 2.2500, 2.5000],
# [2.0000, 2.2500, 2.7500, 3.0000]]]])
torch.load()&torch.load_state_dict()& torch.save()
- torch.load(model,map_location) 加载模型 map_device是分布式训练使用的
- torch.load_state_dict() 加载模型参数
- torch.save() 可以选择存储模型还是模型参数
import torch
from torch import nn
class module(nn.Module):
def __init__(self):
super(module, self).__init__()
self.linear1 = nn.Linear(10,2)
def forward(self, x):
x = self.linear1(x)
return x
module1 = module()
print(module1.state_dict())
# 仅仅保存模型参数
torch.save(module1.state_dict(), 'F:\机器学习\AlexNet\save_model/module1.pth')
# 保存整个模型
# torch.save(model, 'F:\机器学习\AlexNet\save_model/module1.pth') 保存整个模型
# 加载参数
module2.load_state_dict(torch.load('F:\机器学习\AlexNet\save_model/module1.pth'))
# 加载整个模型
# module2.load('F:\机器学习\AlexNet\save_model/module1.pth')
torch.flatten()
- 将多维张量压平成一维张量
import torch
from torch import nn
import torch.nn.functional as F
import numpy as np
data = np.random.randint(0,10,12).reshape(1,3,2,2)
print(data)
print(torch.flatten(torch.tensor(data)))
# [[[[0 1]
# [6 6]]
# [[5 1]
# [6 4]]
# [[7 5]
# [4 6]]]]
# tensor([0, 1, 6, 6, 5, 1, 6, 4, 7, 5, 4, 6], dtype=torch.int32
- 这个就很有意思,他是求了均值,不是直接拉长
import torch
import torch.nn as nn
data = torch.randn(1,3,224,224)
data = data.mean(3).mean(2)
print(data)
# tensor([[-0.0015, -0.0096, -0.0064]])
torch.softmax()在图像分割中的使用
- 当指定维度为通道数时,softmax对像素点的每一个通道进行作用。用一根针扎下去,同一个点的各通道概率值相加为1
import torch
import torch.nn.functional as f
data = torch.randint(0, 4, size=(1, 3, 2, 2), dtype=torch.float)
print(data)
out = f.softmax(data,dim=1)
print(out)
# tensor([[[[0., 0.],
# [1., 1.]],
#
# [[2., 0.],
# [1., 0.]],
#
# [[2., 1.],
# [3., 1.]]]])
# tensor([[[[0.0634, 0.2119],
# [0.1065, 0.4223]],
#
# [[0.4683, 0.2119],
# [0.1065, 0.1554]],
#
# [[0.4683, 0.5761],
# [0.7870, 0.4223]]]])
nn.ModuleList() 和nn.Sequential()
-
一个有序的容器,神经网络模块将按照在传入构造器的顺序依次被添加到计算图中执行,同时以神经网络模块为元素的有序字典也可以作为传入参数

-
参考链接
torch.utils.data.DataLoader() 有待考究
model.train 与model.val
- 参考链接
- 如果模型中有BN层(Batch Normalization)和 Dropout,需要在训练时添加
model.train()。model.train()是保证BN层能够用到每一批数据的均值和方差。对于Dropout,model.train()是随机取一部分网络连接来训练更新参数。 - 如果模型中有BN层(Batch Normalization)和Dropout,在测试时添加
model.eval()。model.eval()是保证BN层能够用全部训练数据的均值和方差,即测试过程中要保证BN层的均值和方差不变。对于Dropout,model.eval()是利用到了所有网络连接,即不进行随机舍弃神经元。 - 网络模型加入Droupt是随机忽略神经元,防止过拟合,这样在每个批次训练的可以随机忽略一些神经元,但下一批次训练忽略的神经元可能不是同一批。 这样做的目的是——忽略一些神经节点, 即使这些被忽略的神经节点非常关键,模型依然有好的训练效果。但
测试的时候,不需要忽略这些神经元,因为训练是为了防止过拟合需要忽略,测试是为了更好的结果,不需要忽略
torch.item()
- 用于损失及精确度,更加准确的浮点数字
import torch
data = torch.randn(size=(1,1))
print(data)
print(data.item())
# tensor([[0.5983]])
# 0.5982968807220459
torch.tensor() 与torch.from_numpy()的区别
torch.tensor()是深拷贝,会开辟一个新的变量空间torch.from_numpy()是浅拷贝,生成的张量会和numpy共用内存空间,效率更高(修改numpy中的元素,张量中的元素也会变化)
#创建一个numpy array的数组
array = np.array([1,2,3,4])
#将numpy array转换为torch tensor
tensor = torch.tensor(array)
Tensor = torch.Tensor(array)
as_tensor = torch.as_tensor(array)
from_array = torch.from_numpy(array)
#修改数组的值
array[0] = 10
#打印结果
print(tensor) #tensor([1, 2, 3, 4])
print(Tensor) #tensor([1., 2., 3., 4.])
print(as_tensor) #tensor([10, 2, 3, 4])
print(from_array) #tensor([10, 2, 3, 4])
.cuda() 与 .to(device)将模型送到GPU上训练
- 1、需要将模型送到GPU上;2、需要将数据集送到GPU上;3、将损失函数送到GPU上
- device = ‘cuda’ if torch.cuda.is_available() else “cpu”
- 二者没有区别
- 参考链接
# 第一种方式
定义好模型,数据集,损失函数后
if torch.cuda.is_available():
net = model.cuda()
····················
if torch.cuda.is_available():
img= img.cuda()
label = label.cuda()
····················
if torch.cuda.is_available():
loss_func = loss.cuda() # 定义好损失函数后将其送到GPU上训练
# 第二种方式
device = torch.device('cuda' if torch.cuda.is_available() else "cpu")
model.to(device)
img/label = img/label.to(device)
loss_func = loss.to(device) #将定义好的交叉损失函数或者其他损失函数送到GPU上
torch.nn.DataParallel() 有待考究
- 多GPU训练
param.requires_grad = False 有待考究
torch.update() model.apply()
- torch.update() 主要用于网络参数的更替 (主要是预训练模型的参数)
- torch.apply() 主要用在init_weight函数定义完之后,对网络模型参数的初始化(自定义参数)
import torch
from torch import nn
class Net(nn.Module):
def __init__(self, in_dim, n_hidden_1, n_hidden_2, out_dim):
super().__init__()
self.layer = nn.Sequential(
nn.Linear(in_dim, n_hidden_1),
nn.ReLU(True),
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.Linear(n_hidden_2, out_dim)
)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
return x
def weight_init(m):
if isinstance(m, nn.Linear):
nn.init.xavier_normal_(m.weight)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
model = Net(in_dim, n_hidden_1, n_hidden_2, out_dim)
model.apply(weight_init)
model_dict = model.state_dict() # PSPNet的可用参数和偏置 定义了网络模型后自动生成的
pretrained_dict = torch.load(model_path) # 加载pspnet_resnet50.pth这个模型
pretrained_dict = {k: v for k, v in pretrained_dict.items() if np.shape(model_dict[k]) == np.shape(v)}
# 或者 pretrained_dict = {k: v for k, v in pretrained_dict.items() if k in model_dict} 还需要咂摸一下
model_dict.update(pretrained_dict) # 更新参数
model.load_state_dict(model_dict) # 加载新的参数
Variable的使用
- Variable是 torch.autograd import Variable的核心类,封装了Tensor张量
- Variable包含三部分
属性
1. x.data 单单是x表示x.data
2. x.grad 存储了梯度
3. x.grad_fn 指向Function对象,用于反向传播的梯度计算之用不懂
DataLoder参数详解
dataset数据集batch_sizeshuffle对每一个epoch是否打乱数据num_workers=0, 工作线程数量,需要根据自己的cpu核数进行设计;默认为0,表示主进程collate_fn, 对batch_size的数据进行处理,不是对整个DataLoder处理(可以将数据预处理放这里,节省内存)pin_memorydrop_last是否抛弃最后一组无法构成batch_size大小的数据- 其他参数默认即可
torch.tile()
- 指定维度扩充倍数,将源数据进行平铺扩充
import torch
image_data = torch.rand(3, 2)
print(image_data)
output = torch.tile(image_data,[2,3])
print(output)
# tensor([[0.5001, 0.6157],
# [0.9579, 0.8233],
# [0.3933, 0.9854]])
# tensor([[0.5001, 0.6157, 0.5001, 0.6157, 0.5001, 0.6157],
# [0.9579, 0.8233, 0.9579, 0.8233, 0.9579, 0.8233],
# [0.3933, 0.9854, 0.3933, 0.9854, 0.3933, 0.9854],
# [0.5001, 0.6157, 0.5001, 0.6157, 0.5001, 0.6157],
# [0.9579, 0.8233, 0.9579, 0.8233, 0.9579, 0.8233],
# [0.3933, 0.9854, 0.3933, 0.9854, 0.3933, 0.9854]])
torchvision
torchvision是pytorch的一个图形库,它服务于PyTorch深度学习框架的,由以下几部分组成
torchvision.datasets: 常用数据库
torchvision.models:常用的预训练模型
torchvision.transforms: 常用的图片转换,一般这里会对图片进行裁剪、翻转、转化为张量、归一化等预处理操作
torchvision.utils: others
参考链接
torchvision.transform.Normalize()
- 对数据的每一个通道进行归一化
- transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) 因为之前已经将图片转为张量,数据在 0~1范围,(0.5, 0.5, 0.5), (0.5, 0.5, 0.5)的意思是三个通道的均值 方差都为0.5,则新的数据范围是 ((0 ~1)–0.5)/0.5 = – 1~ 1 之间,其中的0.5分别是均值 方差
from torchvision import transforms
import torch
from PIL import Image
import numpy as np
root = r'F:\机器学习\AlexNet\spilted_data\train\Cat\0.jpg'
image = Image.open(root, mode='r')
tensor = transforms.ToTensor()
normalize = transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
print(normalize(tensor(image)))
torchvision.transform.Tensor()
- 将图片转为tensor张量,并且将所有像素点的数据/255,使数据在 0~1之间
from torchvision import transforms
import torch
from PIL import Image
import numpy as np
root = r'F:\机器学习\AlexNet\spilted_data\train\Cat\0.jpg'
image = Image.open(root, mode='r')
tensor = transforms.ToTensor()
print(tensor(image))
torchvision.Datasets.ImageFolder
- ImageFloder假设图片已经按照文件夹分号类别,并且图片是以0 1 2 ……为标签的
有待考究
train_datasets_transform = transforms.Compose([
transforms.Resize((224, 224)),
transforms.RandomVerticalFlip(p=0.5),
transforms.ToTensor(),
normalize # 或者直接transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
train_datasets = ImageFolder(root=train_datasets_root, transform=train_datasets_transform)
torchvision.transforms
- 图像裁剪:随机裁剪、中心裁剪等
# 对图像和图像对应的标签进行相同的变换
import torchvision.transforms.functional as TF
from torchvision.transforms import transforms as tfs
def rand_crop(data, label, height, width):
crop_size=[height,width]
i, j, h, w = tfs.RandomCrop.get_params(data, output_size=crop_size)
data = TF.crop(data, i, j, h, w)
label = TF.crop(label, i, j, h, w)
return data, label
# 这不是完全随机裁剪,这是从坐标(i,j)开始裁剪 ,左上角大概率裁掉,右下角大概率还在
torch.backends.cudnn.benchmark
backend后端benchmark基准线- 设置为
ture,程序会事先找到适合每一层卷积层的卷积算法(卷积算法是有很多种的),这样会加快训练速度,仅适用于网络模型是静态的。 运用于动态网路,运行时间反而有可能增大。
argparse.ArgumentParser()
使用方式: 1.创建实例;2.申明参数;3.参数解析- name:名称 不管是–name还是 name-name,一律调用都是name或者name_name 忽略横线
- default:默认值
- help:帮助文档
- type:参数类型
- metavar:帮助文档才管
- nargs:参数个数
import argparse
parser = argparse.ArgumentParser()
parser.add_argument("square", help="display a square of a given number", type=int)
args = parser.parse_args()
TorchSummary
- pytorch的模型可视化工具
- 可以看到参数量、输出形状等。但不利于了解模型结构、卷积核大小 还不如print(model)来的实用
import torch
from torchsummary import summary
from backbone import fcn
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = fcn(21).to(device)
summary(model, input_size=(3, 224, 224))
# ConvTranspose2d-124 [-1, 21, 14, 14] 7,056
# Conv2d-125 [-1, 21, 14, 14] 5,397
# Conv2d-126 [-1, 21, 28, 28] 2,709
# ConvTranspose2d-127 [-1, 21, 28, 28] 7,056
# ConvTranspose2d-128 [-1, 21, 224, 224] 112,896
# ================================================================
# Total params: 21,430,559
# Trainable params: 21,430,559
# Non-trainable params: 0
# ----------------------------------------------------------------
# Input size (MB): 0.57
# Forward/backward pass size (MB): 104.64
# Params size (MB): 81.75
# Estimated Total Size (MB): 186.96
# ----------------------------------------------------------------
tqdm
- 第三方进度条库
postfix后缀tqdm.update(1)默认为1;进度条增加的速度tqdm.close()关闭进度条 有可能进度条也会覆盖到其他加载的数据total 迭代总量tqdm.setdescription()设置前缀tqdm.setpostfix()设置后缀
———————————————————tqdm在深度学习中的使用————————————————————
for epoch in range(epochs):
for img,label in train_dataloder:
…………
———————————————————————————修改为1———————————————————————————
for eoch in range(epoches):
pbar= tqdm(train_dataloder,total=len(train_dataloder)) #用tqdm去包装数据train_dataloder设置了batch_size=8就理解为一捆数据
for img,label in pbar:
…………
pbar.setdescription()#设置前缀
pbar.setpostfix()#设置后缀
pbar.close() #☆☆☆ ☆☆☆这里可以考虑关闭,免得会给其他加载数据也加上了进度条☆☆☆☆☆
———————————————————————————修改为2————————————————————————————
for epoch in range(epochs):
with tqdm(total=len(train_dataloder)) as pbar:
for img,label in train_dataloder:
…………
pbar.setdescription()#设置前缀
pbar.setpostfix()#设置后缀
tensorboard
- 可视化网络结构
import torch
from backbone import fcn
from torch.utils.tensorboard import SummaryWriter
num_classes = 21
net = fcn(num_classes)
data = torch.rand(2, 3, 224, 224)
with SummaryWriter(comment='fcn') as w:
w.add_graph(net, (data,))
- 可视化损失、准确率等
writer = SummaryWriter(comment='.test1') # 写在迭代训练外面
writer.add_scalar('train_acc', train_acc, epoch) # 分别表示标签,y轴,x轴,写在迭代内部,train_acc是表示当前循环的损失
torch hub
- huggingface发布的预训练神经模型库
其他注意事项
epoch、iteration和batchsize
- 参考链接

- 训练模型的过程就是学习卷积核参数的过程,通过反向传播,调整梯度,从而调整卷积核参数。假设总样本的标签只有0 1两个类别,输入一张图片,然后根据标签与实际输出值的不同,调整梯度,调整卷积核参数,再输入一张图片,再调整卷积核参数。这样显然不合理。所以,对于小数据集,直接将样本一次性读入,计算总的均方误差(或者其他误差),然后调整卷积核参数,更能代表该数据集的总体情况;对于大数据集,可以选择一定batch_size的样本进行参数学习,然后迭代直到总样本全部被学习完,也可以再多次重复学习。为什么要打乱呢,我觉得更具普遍性吧。
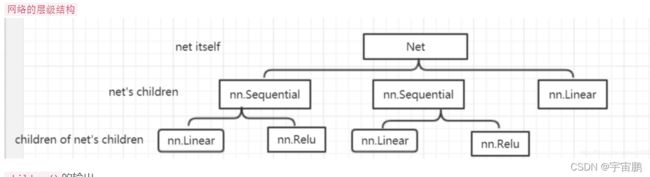
self.modules() children () parameters()
- 参考链接
import torch
from torch import nn
in_dim = 1
n_hidden_1 = 1
n_hidden_2 = 1
out_dim = 1
class Net(nn.Module):
def __init__(self, in_dim, n_hidden_1, n_hidden_2, out_dim):
super().__init__()
self.layer = nn.Sequential(
nn.Linear(in_dim, n_hidden_1),
nn.ReLU(True)
)
self.layer2 = nn.Sequential(
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
)
self.layer3 = nn.Linear(n_hidden_2, out_dim)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
return x
model = Net(in_dim, n_hidden_1, n_hidden_2, out_dim)
for num in model.children():
print(num,end='-'*20)
print('\n')
# Sequential(
# (0): Linear(in_features=1, out_features=1, bias=True)
# (1): ReLU(inplace=True)
# )--------------------
#
# Sequential(
# (0): Linear(in_features=1, out_features=1, bias=True)
# (1): ReLU(inplace=True)
# )--------------------
#
# Linear(in_features=1, out_features=1, bias=True)--------------------
permute(dims) & torch.transpose()
- 参考链接
- permute
坐标重排列的意思用法是 tensor.permute() - pytorch中,数据可能是
B C H W,可以用这个函数重排列为B H W C(具体数据会跟着变化),之后处理完毕后再重排列为B C H W,数据恢复为原状 - torch.transpose() 也可以
重新排列维度,但一次只能交换两个维度(只能有两个参数),但可以连续transposed达到permute的效果 - 二者
元素排列顺序改变 - transpose后的张量与原张量是
内存共享的 修改其中一个张量的元素,都会影响另一个张量的值
import torch
data = torch.arange(0, 18).view(3, 2, 3)
print(data.shape)
# torch.Size([3, 2, 3])
print(data)
# tensor([[[ 0, 1, 2],
# [ 3, 4, 5]],
#
# [[ 6, 7, 8],
# [ 9, 10, 11]],
#
# [[12, 13, 14],
# [15, 16, 17]]])
new_data = data.permute(1, 2, 0)
print(new_data)
# tensor([[[ 0, 6, 12],
# [ 1, 7, 13],
# [ 2, 8, 14]],
#
# [[ 3, 9, 15],
# [ 4, 10, 16],
# [ 5, 11, 17]]])
print(new_data.shape)
# torch.Size([2, 3, 3])
back_new_data = new_data.permute(2, 0, 1)
print(back_new_data)
# tensor([[[ 0, 1, 2],
# [ 3, 4, 5]],
#
# [[ 6, 7, 8],
# [ 9, 10, 11]],
#
# [[12, 13, 14],
# [15, 16, 17]]])
temp_inputs = inputs.transpose(1, 2).transpose(2, 3).contiguous().view(-1, c)
import torch
x = torch.randn(3, 2)
print(x)
y = x.transpose(0, 1)
print(y)
x[0, 0] = 233
print(x)
print(y[0, 0])
#tensor([[-2.2697, -0.0395],
# [ 0.0415, -1.1239],
# [-0.5022, 0.3883]])
# tensor([[-2.2697, 0.0415, -0.5022],
# [-0.0395, -1.1239, 0.3883]])
# tensor([[ 2.3300e+02, -3.9459e-02],
# [ 4.1472e-02, -1.1239e+00],
# [-5.0219e-01, 3.8831e-01]])
# tensor(233.)
reshape()/view()
功能一样,自定义大小,元素排列顺序不变,这跟permute的坐标系变换不同
squeeze()/unsqueeze()
- squeeze()对数据降维 ; unsqueeze()对数据进行升维
suqeeze()不指定维度,将维度为1,的全部压缩suqeeze(dim)指定维度压缩,指定的维度为1,进行压缩;不为1,则不进行压缩unsqueeze()假设数据维度为A * B * C,unsqueeze(0),表示为1* A * B * C;unsqueeze(1),表示为 A * 1 * B * C;unsqueeze(2),表示为 A * B * 1 * C;unsqueeze(-1),表示为 A * B * C * 1;
pytorch网络模型参数形式
- 参数返回类型是
Parameter - 可以通过
Parameter.weight(bias).data获取权重和偏置。
import torch
import torch.nn as nn
data = torch.randint(0, 10, size=(1, 3, 2, 2),dtype=torch.float)
conv_transposed = nn.ConvTranspose2d(3, 3, 4, 2, 1)
new_data = conv_transposed(data)
print(conv_transposed.weight.shape)
# 这个和下面的写法等价,建议下面那个
# print(conv_transposed.weight.data.shape)
# torch.Size([3, 3, 4, 4])
# torch.Size([3, 3, 4, 4])
# print(conv_transposed.bias)
Variable在神经网络中的使用
- 弃用
crop与resize的区别
crop是裁剪resize是伸缩变换
from PIL import Image
import torchvision.transforms as tfs
from matplotlib import pyplot as plt
import numpy as np
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
root = r'F:\机器学习\AlexNet\spilted_data\train\Cat\4.jpg'
img = Image.open(root)
tranformer = tfs.Resize(200)
plt.subplot(1,2,1), plt.imshow(img)
new_img = tranformer(img)
plt.subplot(1,2,2), plt.imshow(new_img)
plt.show()
