Keras - Batch normalization 理论与实践
一.引言
根据论文《Batch Normalization: Accelerating Deep Network Training b y Reducing Internal Covariate Shift》所述,神经网络训练过程中,每层输入的分布随着前一层参数的变化进行训练,这就导致了上层网络需要不断调整参数适应不同分布的输入数据,这不仅降低了训练的速率,也使得很难训练得到具有饱和非线性的模型。我们称之为 Internal Covariate Shift,翻译下来是内部协变量位移,其实就是指隐层数据分布随网络参数变化而变化的情况。为此我们引入了Batch Normalization 即规范化层输入来解决问题,这允许我们使用更高的学习率同时不必在参数初始化时太过谨慎,它还可以作为正则化在某些情况下减少对 Dropout 的需求。
二.Batch normalization 理论
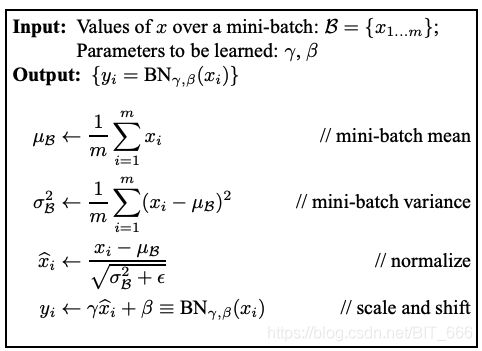
顾名思义,Batch normalization (之后都用BN代替) 是对一个 batch 的数据作归一化,其可以看作是一个层,一般添加在全连接层后。按照论文的描述,其操作步骤如下:
 CSDN-BITDDD
CSDN-BITDDD
其中针对每一个 mini-batch 的数据(共m条样本),分别求其均值与方差并标准化 xi,这里方差部分用到了  (epsilon) 是一个小常数,防止分母为0的情况发生。注意最后的输出并不是标准化后的 xi,而是经过了缩放和平移的
(epsilon) 是一个小常数,防止分母为0的情况发生。注意最后的输出并不是标准化后的 xi,而是经过了缩放和平移的
![]()
这里 γ(gamma) 和 β(beta) 是需要学习的参数。需要注意的是 BN 层在训练和预测时的逻辑是不同的,下面简单区分一下。
1.BN层基本参数
先说下 BN 层的基本参数:
(1) γ(gamma) : 需要学习的缩放因子,即上图的 scale,初始化为1
(2) β(beta) : 需要学习的偏移因子,即上图的 shift,初始化为0
(3) momentum : 滑动平均的动量因子
(4) moving_mean : 滑动均值,不需要学习的参数,根据每轮训练更新,根据每一个batch的均值的更新:
![]()
(5) moving_var : 滑动方差,不需要学习的参数,根据每轮训练更新,根据每一个batch的方差的更新:
![]()
2.Batch normalization 训练
训练期间,均值和方差的计算来自当前的 mini-batch,scala 和 shift 值是模型学习得到的(Tips: BN层的 trainable 参数默认是 False,所以训练期间一定要记得设置为 True),全局的滑动均值与滑动方差则是根据 momentum 在训练过程中更新,即训练时BN层返回:
![]()
3.Batch normalization 预测
预测期间用到了训练期间一直更新的全局的滑动平均与滑动方差值,训练与预测的主要不同就是均值与方差的获取方式,常量 (epsilon) 保持不变:
![]()
三.Batch normalization 实践
1.试验设置
实验数据采用 mnist 手写识别数据,手写数字识别中有一个归一化的操作是:
train_images = train_images.astype('float32') / 255
这是因为图像像素是0-255的数值,通过 / 255 将图像的像素归一化到 0-1 的数值,方便模型学习,下面做4组对照试验:
| A | 归一化数据 (0-1) | 无 Batch normalization |
| B | 归一化数据 (0-1) | 有 Batch normalization |
| C | 未归一化数据 (0-255) | 无 Batch normalization |
| D | 未归一化数据 (0-255) | 有 Batch normalization |
2.数据获取
get_train_test_data 分别获取归一化和未归一化的训练测试数据以及对应 label。
def get_train_test_data():
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images = train_images.reshape((60000, 28 * 28))
ori_train_images = train_images
train_images = train_images.astype('float32') / 255
test_images = test_images.reshape((10000, 28 * 28))
ori_test_images = test_images
test_images = test_images.astype('float32') / 255
train_labels = to_categorical(train_labels)
test_labels = to_categorical(test_labels)
print("原始训练集维度: ", ori_train_images.shape, " 训练集维度: ", train_images.shape, " 训练标签维度: ", train_labels.shape)
print("原始测试集维度: ", ori_test_images.shape, " 测试集维度: ", test_images.shape, " 测试标签维度: ", test_labels.shape)
return ori_train_images, train_images, train_labels, ori_test_images, test_images, test_labels (ori_train_images, train_images, train_labels, ori_test_images, test_images, test_labels) = get_train_test_data()
3.模型构建
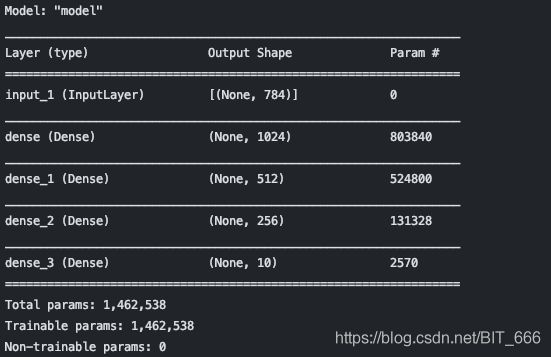
这里采用3个 Dense 层构建 Baseline 模型,隐层参数分别设置为1024,512,256
(1) BaseLine Without Batch normalization
经典的 Dense 层连接
(2) Baseline With Batch normalization
在三个 Dense 层之间增加了两个 BN 层,其余一致,注意 BN 的 trainable 设置为 True。
BatchNormalization(trainable=True)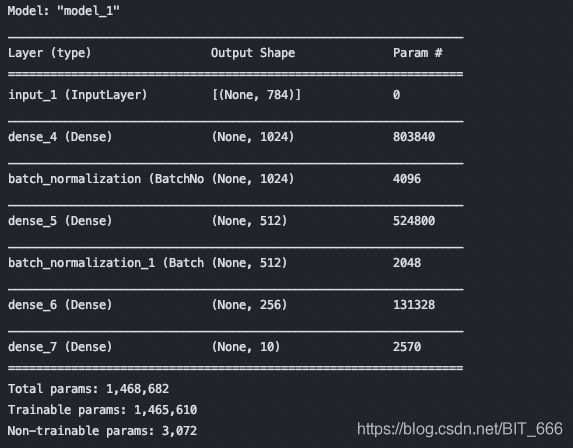
4.模型训练结果
Tips :每次实验结果可能不一致,也可以多次试验取平均
进行两两对照实验比对:
A-B -> 归一化数据下是否包含BN影响不大,但是添加了BN层的模型各项指标均稍有提升
C-D -> 未归一化数据情况下包含 BN 影响较大,相差1个点,Loss 值相比归一化的数据也更大
A-C -> 相同模型,数据是否归一化对模型效果有较大影响,相差约1个点
B-D -> 相同模型,数据是否归一化在包含 BN 层下影响较小,acc 和 loss 都小幅下降
| 实验 | 数据样式 | 是否包含BN | Test Acc | Test Loss |
| A | 归一化数据 (0-1) | 无 Batch normalization | 0.9789 | 0.1826 |
| B | 归一化数据 (0-1) | 有 Batch normalization | 0.9804 | 0.1260 |
| C | 未归一化数据 (0-255) | 无 Batch normalization | 0.9696 | 0.6121 |
| D | 未归一化数据 (0-255) | 有 Batch normalization | 0.9797 | 0.1433 |
5.BN 可视化
下面我们取一条测试样本,比较一下 C,D 实验三个隐层的激活输出图,感受一下 BN 层的作用 :
 CSDN-BITDDD
CSDN-BITDDD
不包含 BN 层的数据由于数据分布比较分散,随着激活函数的激活,前向传播的信息越来越少,这也就是为什么随着层数增加常常出现梯度消失的情况。
 CSDN-BITDDD
CSDN-BITDDD
包含 BN 层归一化数据,使得更多的权重得到训练,更多的信息向后面的层传播,可以让原始信息更好的传递下去。
四.总结
简单来说,由于数据分布的不一致性会导致模型训练过程中存在:
(1) 模型参数不断调整适应新数据 -> 降低训练效率
(2) 训练效率降低,模型训练不易收敛 -> 梯度消失
采用 BN 可以有效传递原始数据信息,避免梯度消失的情况,提升模型学习效果。